| | | | |
| | | | |
| Geregelte Servosteuerung (PID), Parameteränderung im Betrieb | Geregelte Servosteuerung (PID), Parameteränderung im Betrieb | Geregelte Servosteuerung (PID), Parameteränderung im Betrieb | Geregelte Servosteuerung (PID), Parameteränderung im Betrieb |
Servofrequenz Positionsregelung | | | | |
Servofrequenz Stromregelung | | | | |
EtherCAT Zykluszeit, Frequenz Profilgenerator | | | | |
| Punkt-zu-Punkt, Jog, S-Kurve, interpolierte koordinierte Mehrachsenprofile | Punkt-zu-Punkt, Jog, S-Kurve, interpolierte koordinierte Mehrachsenprofile | Punkt-zu-Punkt, Jog, S-Kurve, interpolierte koordinierte Mehrachsenprofile | Punkt-zu-Punkt, Jog, S-Kurve, interpolierte koordinierte Mehrachsenprofile |
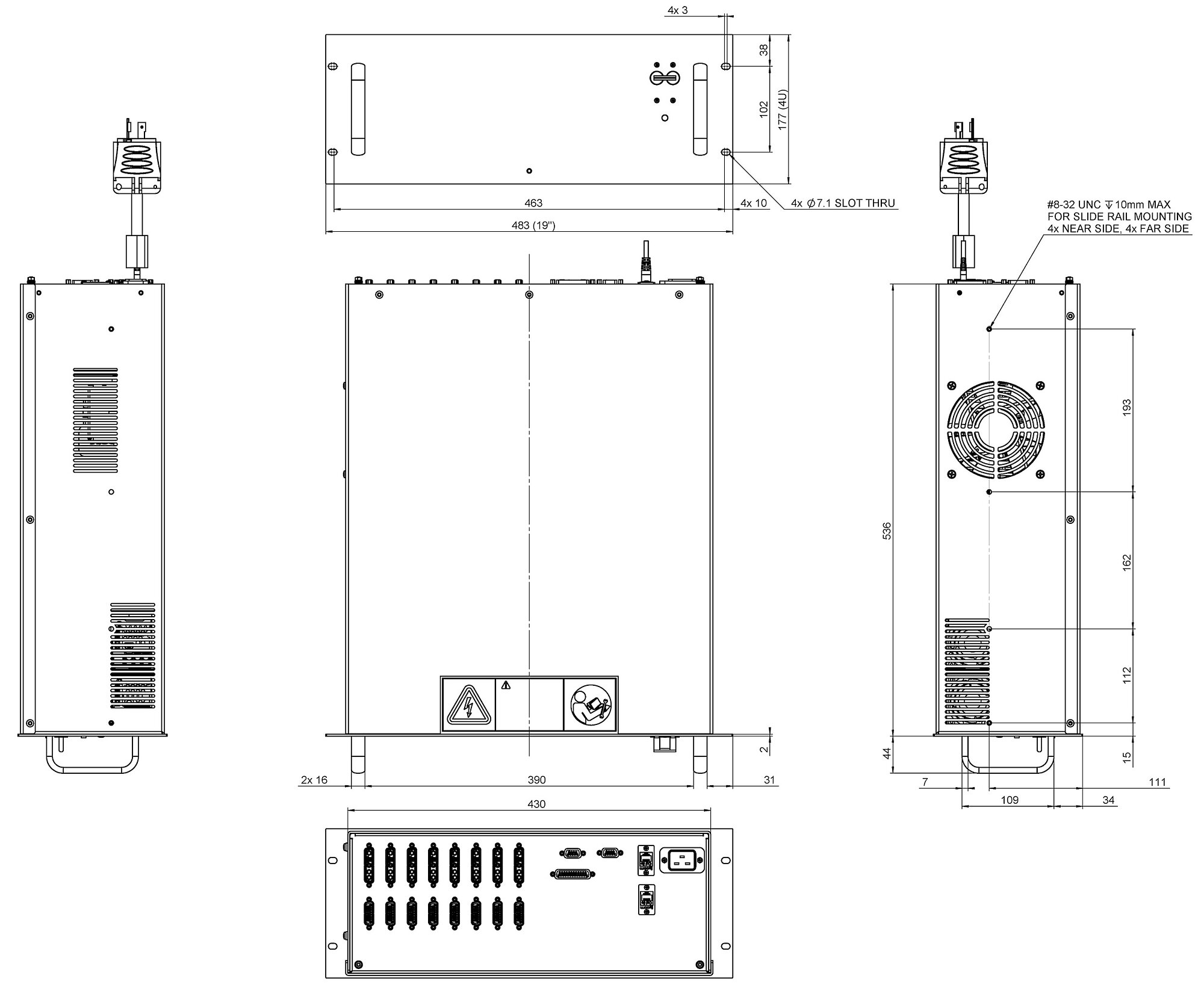
| Seitlicher Lüfter (Dauerbetrieb, konstante Drehzahl) | Seitlicher Lüfter (Dauerbetrieb, konstante Drehzahl) | Seitlicher Lüfter (Dauerbetrieb, konstante Drehzahl) | Seitlicher Lüfter (Dauerbetrieb, konstante Drehzahl) |
| | | | |
| Voice Coil Bürstenbehafteter DC-Motor Bürstenloser 3-Phasen-Motor mit Sinuskommutierung | Voice Coil Bürstenbehafteter DC-Motor Bürstenloser 3-Phasen-Motor mit Sinuskommutierung | Voice Coil Bürstenbehafteter DC-Motor Bürstenloser 3-Phasen-Motor mit Sinuskommutierung | Voice Coil Bürstenbehafteter DC-Motor Bürstenloser 3-Phasen-Motor mit Sinuskommutierung |
Encoderoptionen (ab Werk) (Individuell kundenspezifisch konfigurierbar für Kombinationen) | Inkrementell Sinus/Cosinus (1 Vpp) A/B-Quadratur (RS-422) (auf Anfrage) Absolutencoder BiSS-C | Inkrementell Sinus/Cosinus (1 Vpp) A/B-Quadratur (RS-422) (auf Anfrage) Absolutencoder BiSS-C | Inkrementell Sinus/Cosinus (1 Vpp) A/B-Quadratur (RS-422) (auf Anfrage) Absolutencoder BiSS-C | Inkrementell Sinus/Cosinus (1 Vpp) A/B-Quadratur (RS-422) (auf Anfrage) Absolutencoder BiSS-C |
Interpolationsfaktor Sinus/Cosinus-Encoder | 4x bis 16384x (per Software einstellbar) | 4x bis 65532x (per Software einstellbar) | 4x bis 16384x (per Software einstellbar) | 4x bis 16384x (per Software einstellbar) |
| | | | |
Ausgangsstrom (pro Achse) | 10 A Dauerbetrieb, 20 A Spitze (<1 s) | 6,6 A Dauerbetrieb, 20 A Spitze (<1 s) | 10 A Dauerbetrieb, 20 A Spitze (<1 s) | 10 A Dauerbetrieb, 20 A Spitze (<1 s) |
Ausgangsleistung (gesamt) | 1100 W Dauerbetrieb 2300 W Spitze | 1500 W Dauerbetrieb 3000 W Spitze | 1500 W Dauerbetrieb 3000 W Spitze | 1500 W Dauerbetrieb 3000 W Spitze |