Rotationstische
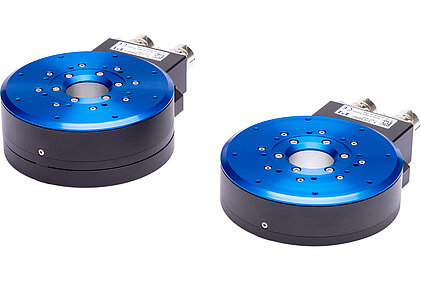
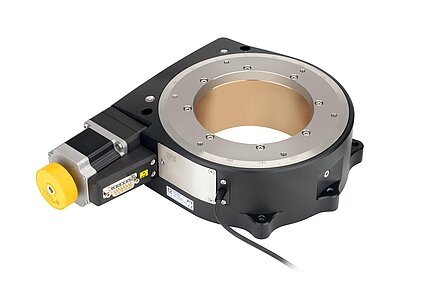
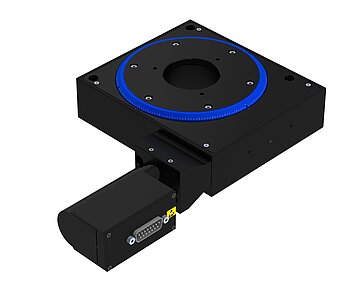
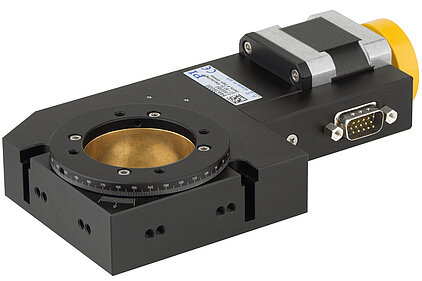
Die Anforderungen an rotatorische Positionierung sind breit gefächert in Bezug auf Traglasten, Baugrößen und Genauigkeit. PI bietet Tische mit allen verfügbaren Antriebstechnologien und Führungsmechanismen. Das umfasst luftgelagert Torque-Motor-Tische, motorisierte Tische mit Schneckengetriebe, winzige Piezomotortische und spezielle Goniometertische, die für Bewegung in zwei Achsen orthogonal montiert werden können. Für nahezu alle gibt es passende lineare, Hub- und Kreuztische, die zu Mehrachsen-Aufbauten kombiniert werden können.