|
Aktive Achsen
|
θZ
|
θZ
|
θZ
|
θZ
|
θZ
|
θZ
|
θZ
|
|
|
Rotationsbereich in θZ
|
360 °
|
360 °
|
360 °
|
360 °
|
360 °
|
360 °
|
360 °
|
|
|
Maximale Winkelgeschwindigkeit in θZ, unbelastet
|
200 °/s
|
200 °/s
|
200 °/s
|
200 °/s
|
200 °/s
|
50 °/s
|
50 °/s
|
|
|
Radiale Abweichung E_XC
|
± 2,5 µm
|
± 2,5 µm
|
± 2,5 µm
|
± 2,5 µm
|
± 2,5 µm
|
± 2,5 µm
|
± 2,5 µm
|
typ.
|
|
Axiale Abweichung E_ZC
|
± 1 µm
|
± 1 µm
|
± 1 µm
|
± 1 µm
|
± 1 µm
|
± 1 µm
|
± 1 µm
|
typ.
|
|
Verkippung E_AC (Wobble)
|
± 15 µrad
|
± 15 µrad
|
± 15 µrad
|
± 15 µrad
|
± 15 µrad
|
± 15 µrad
|
± 15 µrad
|
typ.
|
|
Positionieren
|
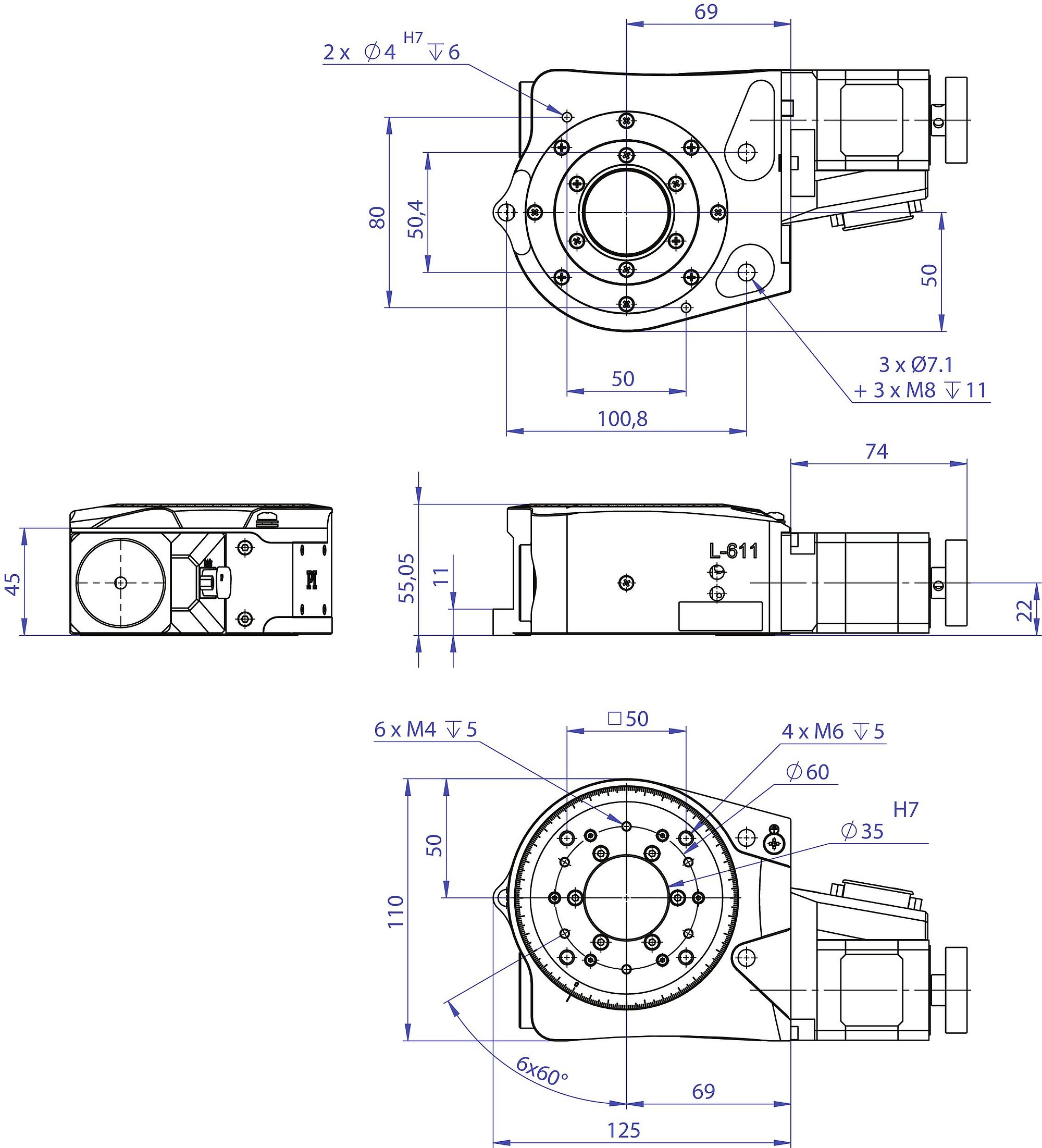
L-611.90AD
|
L-611.94AD
|
L-611.993232
|
L-611.993261
|
L-611.995232
|
L-611.9ASD
|
L-611.90SD
|
Toleranz
|
|
Kleinste Schrittweite in θZ
|
35 µrad
|
17,45 µrad
|
35 µrad
|
3,5 µrad
|
35 µrad
|
0,87 µrad
|
20 µrad
|
typ.
|
|
Unidirektionale Wiederholgenauigkeit in θZ
|
± 17,5 µrad
|
± 8,725 µrad
|
± 17,5 µrad
|
± 1,75 µrad
|
± 17,5 µrad
|
± 0,435 µrad
|
± 10 µrad
|
typ.
|
|
Bidirektionale Wiederholgenauigkeit in θZ
|
350 µrad
|
34,9 µrad
|
350 µrad
|
7 µrad
|
350 µrad
|
7 µrad
|
350 µrad
|
typ.
|
|
Referenzschalter
|
Hall-Effekt, Öffner, 5 V, TTL
|
Hall-Effekt, Öffner, 5 V, TTL
|
Hall-Effekt, Öffner, 5 V, TTL
|
Hall-Effekt, Öffner, 5 V, NPN
|
Hall-Effekt, Öffner, 5 V, TTL
|
Hall-Effekt, Öffner, 5 V, NPN
|
Hall-Effekt, Öffner, 5 V, NPN
|
|
|
Wiederholgenauigkeit des Referenzschalters, rotatorisch
|
2 µrad
|
2 µrad
|
2 µrad
|
2 µrad
|
2 µrad
|
2 µrad
|
2 µrad
|
|
|
Integrierter Sensor
|
Inkrementeller Rotationsencoder
|
Inkrementelles Winkelmesssystem
|
Inkrementeller Rotationsencoder
|
Inkrementelles Winkelmesssystem
|
Inkrementeller Rotationsencoder
|
Inkrementelles Winkelmesssystem
|
—
|
|
|
Sensorsignal
|
A/B-Quadratur, RS-422
|
A/B-Quadratur, RS-422
|
A/B-Quadratur, RS-422
|
Sin/Cos, 1 V Spitze-Spitze
|
A/B-Quadratur, RS-422
|
Sin/Cos, 1 V Spitze-Spitze
|
—
|
|
|
Sensorsignalperioden / U
|
—
|
9000
|
—
|
9000
|
—
|
9000
|
—
|
|
|
Sensorauflösung
|
20000 Impulse/U
|
—
|
20000 Impulse/U
|
—
|
20000 Impulse/U
|
—
|
—
|
|
|
Antriebseigenschaften
|
L-611.90AD
|
L-611.94AD
|
L-611.993232
|
L-611.993261
|
L-611.995232
|
L-611.9ASD
|
L-611.90SD
|
Toleranz
|
|
Antriebstyp
|
DC-Motor mit ActiveDrive
|
DC-Motor mit ActiveDrive
|
DC-Motor
|
DC-Motor
|
Bürstenloser DC-Motor
|
2-Phasen-Schrittmotor
|
2-Phasen-Schrittmotor
|
|
|
Betriebsspannung
|
24 V
|
24 V
|
24 V
|
24 V
|
24 V
|
24 V
|
24 V
|
|
|
Nennstrom, effektiv
|
—
|
—
|
3,3 A
|
3,3 A
|
2,42 A
|
1,2 A
|
1,2 A
|
typ.
|
|
Maximale Leistungsaufnahme
|
40 W
|
40 W
|
90 W
|
90 W
|
85 W
|
10 W
|
10 W
|
|
|
Motorauflösung
|
—
|
—
|
—
|
—
|
—
|
200 Vollschritte/U
|
200 Vollschritte/U
|
|
|
Drehmomentkonstante
|
—
|
—
|
—
|
—
|
0,031 N·m/A
|
—
|
—
|
typ.
|
|
Widerstand Phase-Phase
|
—
|
—
|
5,84 Ω
|
5,84 Ω
|
0,4 Ω
|
3,3 Ω
|
3,3 Ω
|
typ.
|
|
Induktivität Phase-Phase
|
—
|
—
|
0,56 mH
|
0,56 mH
|
0,32 mH
|
2,8 mH
|
2,8 mH
|
|
|
Gegen-EMK Phase-Phase, rotatorisch
|
—
|
—
|
—
|
—
|
3,3 V/kRPM
|
—
|
—
|
max.
|
|
Polpaarzahl
|
—
|
—
|
—
|
—
|
7
|
—
|
—
|
|
|
Mechanische Eigenschaften
|
L-611.90AD
|
L-611.94AD
|
L-611.993232
|
L-611.993261
|
L-611.995232
|
L-611.9ASD
|
L-611.90SD
|
Toleranz
|
|
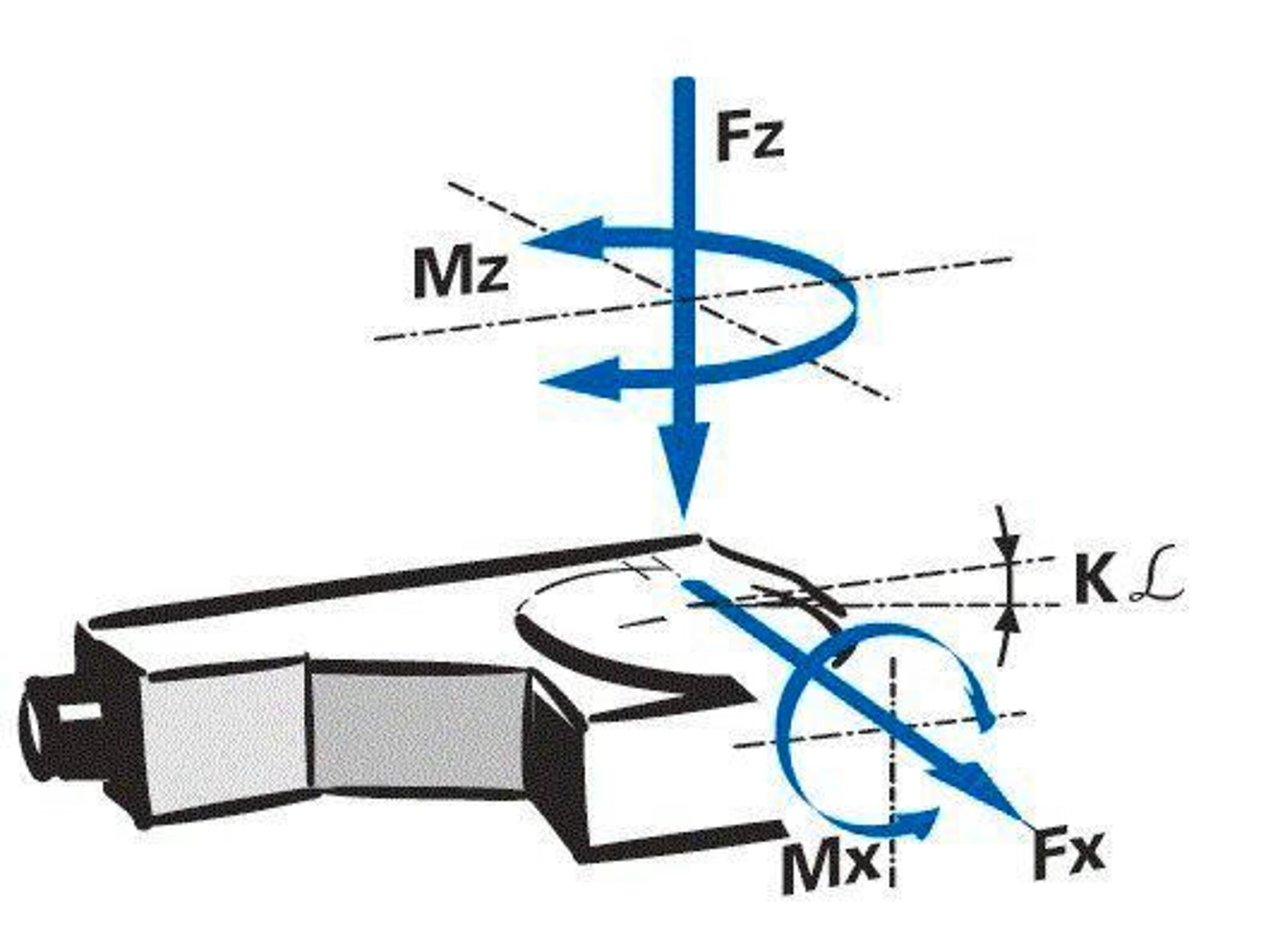
Zulässige Druckkraft in X
|
50 N
|
50 N
|
50 N
|
50 N
|
50 N
|
50 N
|
50 N
|
max.
|
|
Zulässige Druckkraft in Y
|
50 N
|
50 N
|
50 N
|
50 N
|
50 N
|
50 N
|
50 N
|
max.
|
|
Zulässige Druckkraft in Z
|
100 N
|
100 N
|
100 N
|
100 N
|
100 N
|
100 N
|
100 N
|
max.
|
|
Zulässige Zugkraft in X
|
50 N
|
50 N
|
50 N
|
50 N
|
50 N
|
50 N
|
50 N
|
max.
|
|
Zulässige Zugkraft in Y
|
50 N
|
50 N
|
50 N
|
50 N
|
50 N
|
50 N
|
50 N
|
max.
|
|
Zulässige Zugkraft in Z
|
100 N
|
100 N
|
100 N
|
100 N
|
100 N
|
100 N
|
100 N
|
max.
|
|
Zulässiges Moment in θX
|
40 N·m
|
40 N·m
|
40 N·m
|
40 N·m
|
40 N·m
|
40 N·m
|
40 N·m
|
max.
|
|
Zulässiges Moment in θY
|
40 N·m
|
40 N·m
|
40 N·m
|
40 N·m
|
40 N·m
|
40 N·m
|
40 N·m
|
max.
|
|
Zulässiges Moment in θZ
|
3 N·m
|
3 N·m
|
3 N·m
|
3 N·m
|
3 N·m
|
3 N·m
|
3 N·m
|
max.
|
|
Trägheitsmoment in θZ, unbelastet
|
770 kg·mm²
|
770 kg·mm²
|
770 kg·mm²
|
770 kg·mm²
|
770 kg·mm²
|
770 kg·mm²
|
770 kg·mm²
|
±20 %
|
|
Bewegte Masse in θZ, unbelastet
|
1100 g
|
1100 g
|
1100 g
|
1100 g
|
1100 g
|
1100 g
|
1100 g
|
|
|
Schneckengetriebeuntersetzung
|
90 : 1
|
90 : 1
|
90 : 1
|
90 : 1
|
90 : 1
|
90 : 1
|
90 : 1
|
|
|
Lagertyp
|
Kugellager
|
Kugellager
|
Kugellager
|
Kugellager
|
Kugellager
|
Kugellager
|
Kugellager
|
|
|
Gesamtmasse
|
2600 g
|
2600 g
|
2600 g
|
2600 g
|
2600 g
|
2600 g
|
2600 g
|
|
|
Material
| Aluminium, eloxiert; Edelstahl; Rotguss | Aluminium, eloxiert; Edelstahl; Rotguss | Aluminium, eloxiert; Edelstahl; Rotguss | Aluminium, eloxiert; Edelstahl; Rotguss | Aluminium, eloxiert; Edelstahl; Rotguss | Aluminium, eloxiert; Edelstahl; Rotguss | Aluminium, eloxiert; Edelstahl; Rotguss |
|
|
Anschlüsse und Umgebung
|
L-611.90AD
|
L-611.94AD
|
L-611.993232
|
L-611.993261
|
L-611.995232
|
L-611.9ASD
|
L-611.90SD
|
Toleranz
|
|
Betriebstemperaturbereich
|
5 bis 40 °C
|
5 bis 40 °C
|
5 bis 40 °C
|
5 bis 40 °C
|
5 bis 40 °C
|
5 bis 40 °C
|
5 bis 40 °C
|
|
|
Anschluss
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
HD D-Sub 26 (m)
|
HD D-Sub 26 (m)
|
HD D-Sub 26 (m)
|
HD D-Sub 26 (m)
|
HD D-Sub 26 (m)
|
|
|
Sensoranschluss
|
—
|
—
|
—
|
D-Sub 9 (m)
|
—
|
D-Sub 9 (m)
|
—
|
|
|
Anschluss Versorgungsspannung
|
M8 4-polig (m)
|
M8 4-polig (m)
|
—
|
—
|
—
|
—
|
—
|
|
|
Empfohlene Controller / Treiber
| C-863.12 C-885 mit C-863.20C885 C-884 | C-863.12 C-885 mit C-863.20C885 C-884 | C-863.12 C-885 mit C-863.20C885 C-884 Modularer ACS-Controller | C-863.12 C-885 mit C-863.20C885 C-884 Modularer ACS-Controller | C-891.130300 C-885 mit C-891.11C885 Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 Modularer ACS-Controller |
|