
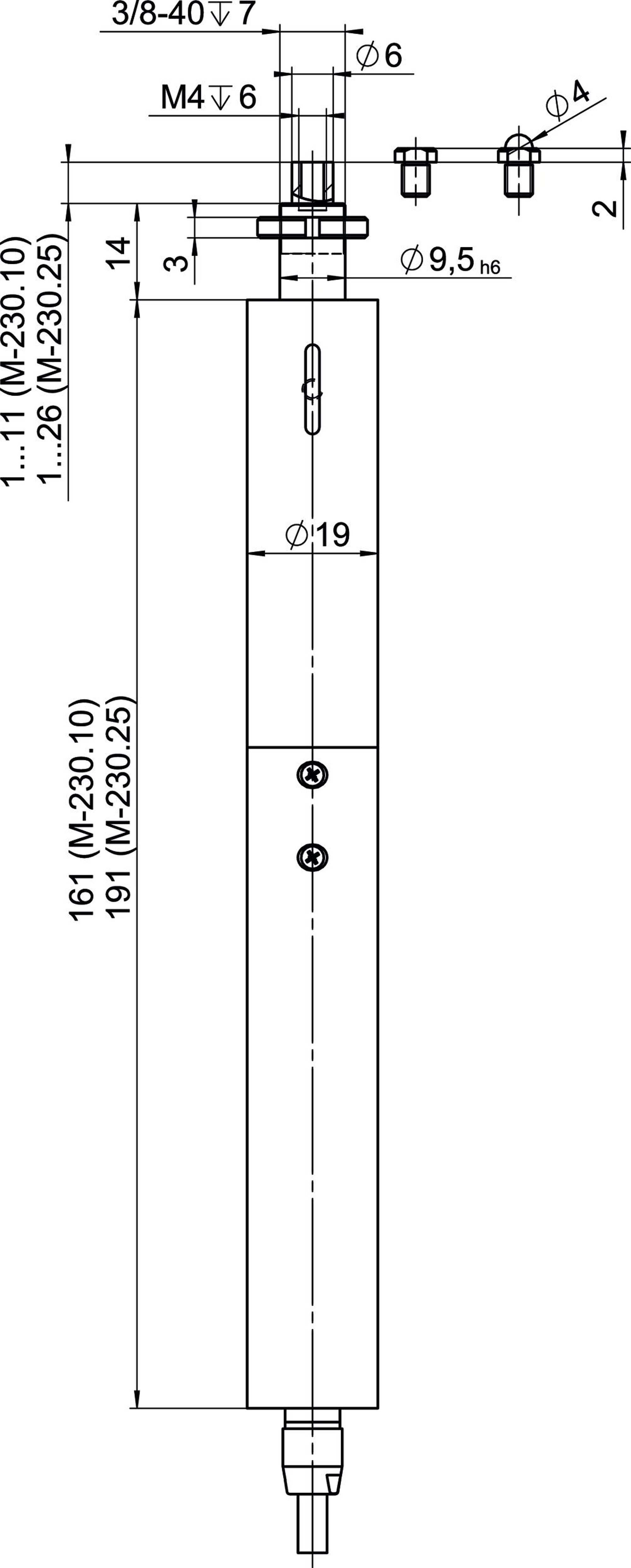




M-230.10
Hochauflösender Linearaktor mit DC- oder Schrittmotor; DC-Getriebemotor; 10 mm Stellweg; 70 N Vorschubkraft; 0,8 mm/s maximale Geschwindigkeit; Trapezgewindespindel; Inkrementeller Rotationsencoder, 2048 Impulse/U Sensorauflösung; Endschalter: Hall-Effekt; 0,5 m Kabellänge







