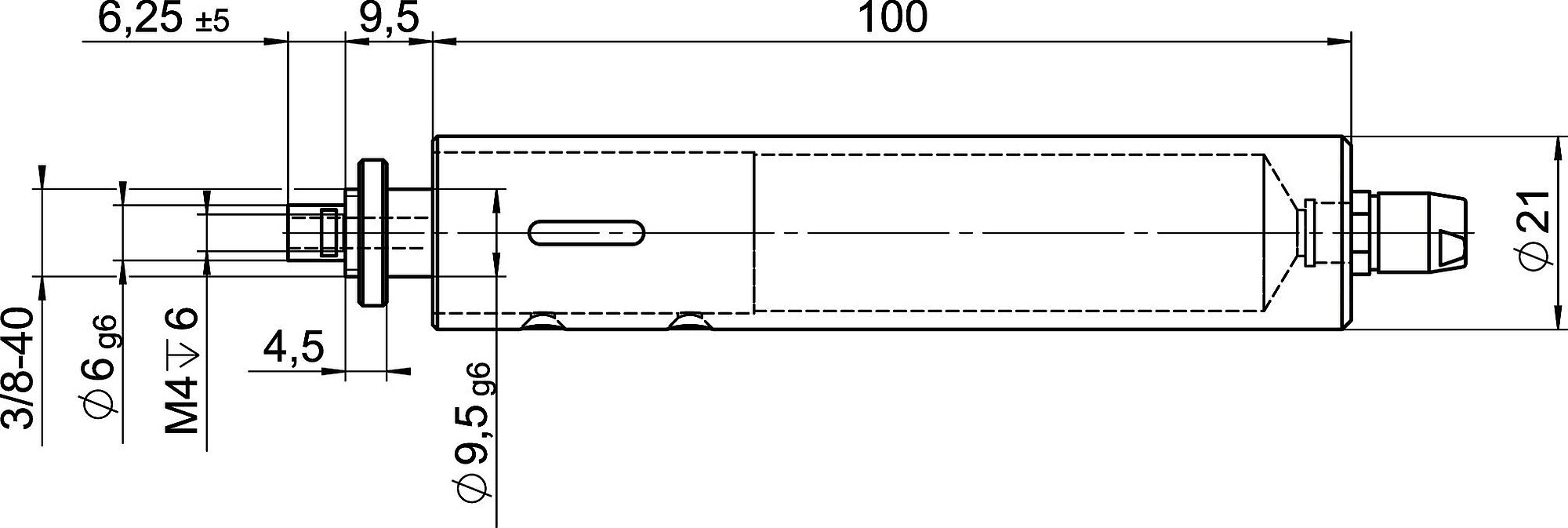
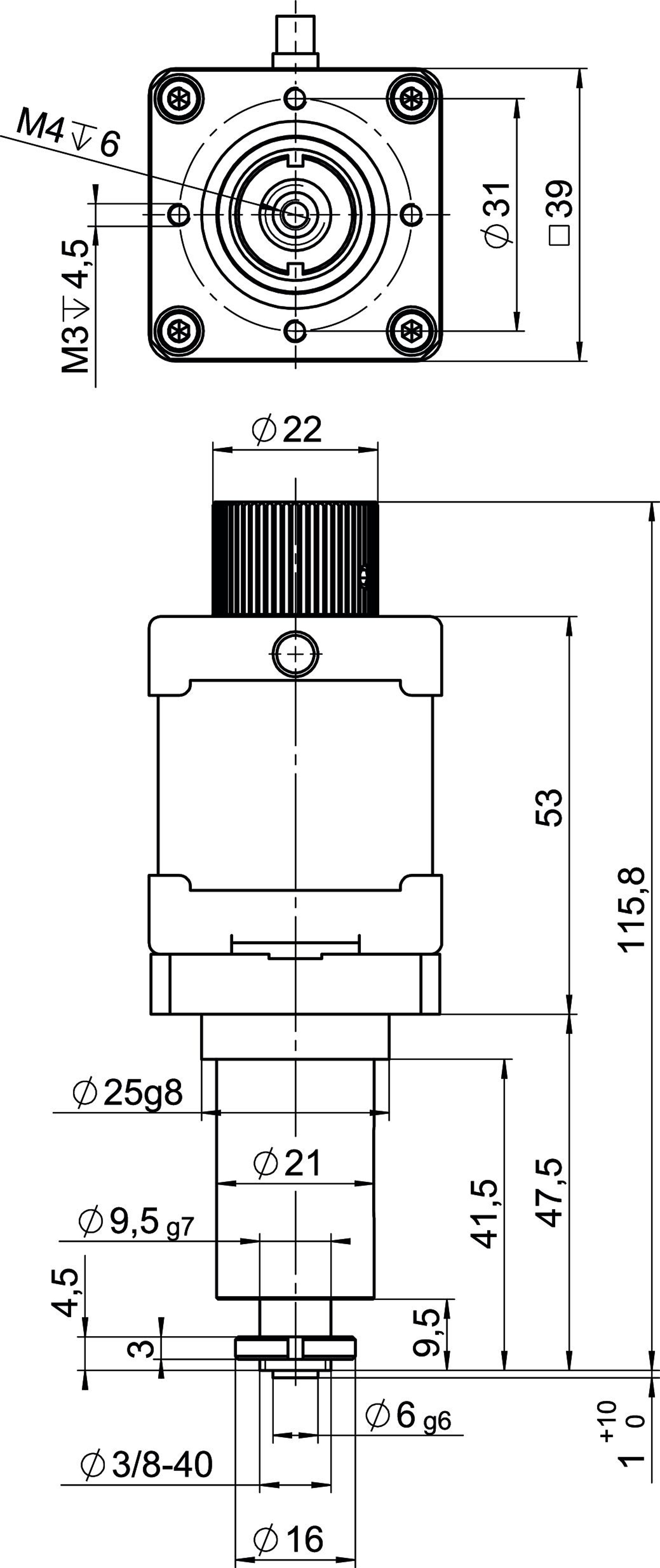
M-228.10S
Hochauflösender Linearaktor mit Schrittmotor; 2-Phasen-Schrittmotor mit Getriebe; 10 mm Stellweg; 20 N Vorschubkraft; 1,5 mm/s maximale Geschwindigkeit; Trapezgewindespindel; Endschalter: Hall-Effekt; 0,5 m Kabellänge






Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.





