M-110.1DG1
Kompakter Lineartisch; DC-Getriebemotor; 5 mm Stellweg; 30 N Belastbarkeit; 1 mm/s maximale Geschwindigkeit; Feingewindespindel; Inkrementeller Rotationsencoder, 2048 Impulse/U Auflösung; 0,5 m Kabellänge





Kompakter Lineartisch, vielseitig einsetzbar
Lineartisch mit kompakter Baugröße durch gefalteten Antrieb mit Riemengetriebe. Freie Apertur mit 10 mm Ø. XY-Aufbauten sind direkt montierbar ohne Adapterplatte.
Antrieb
Positionsmessung
Einsatzgebiete
Präzisions-Mikromontage. Forschung. Laserbeschriftung. Automatisierung. Optische Justage.
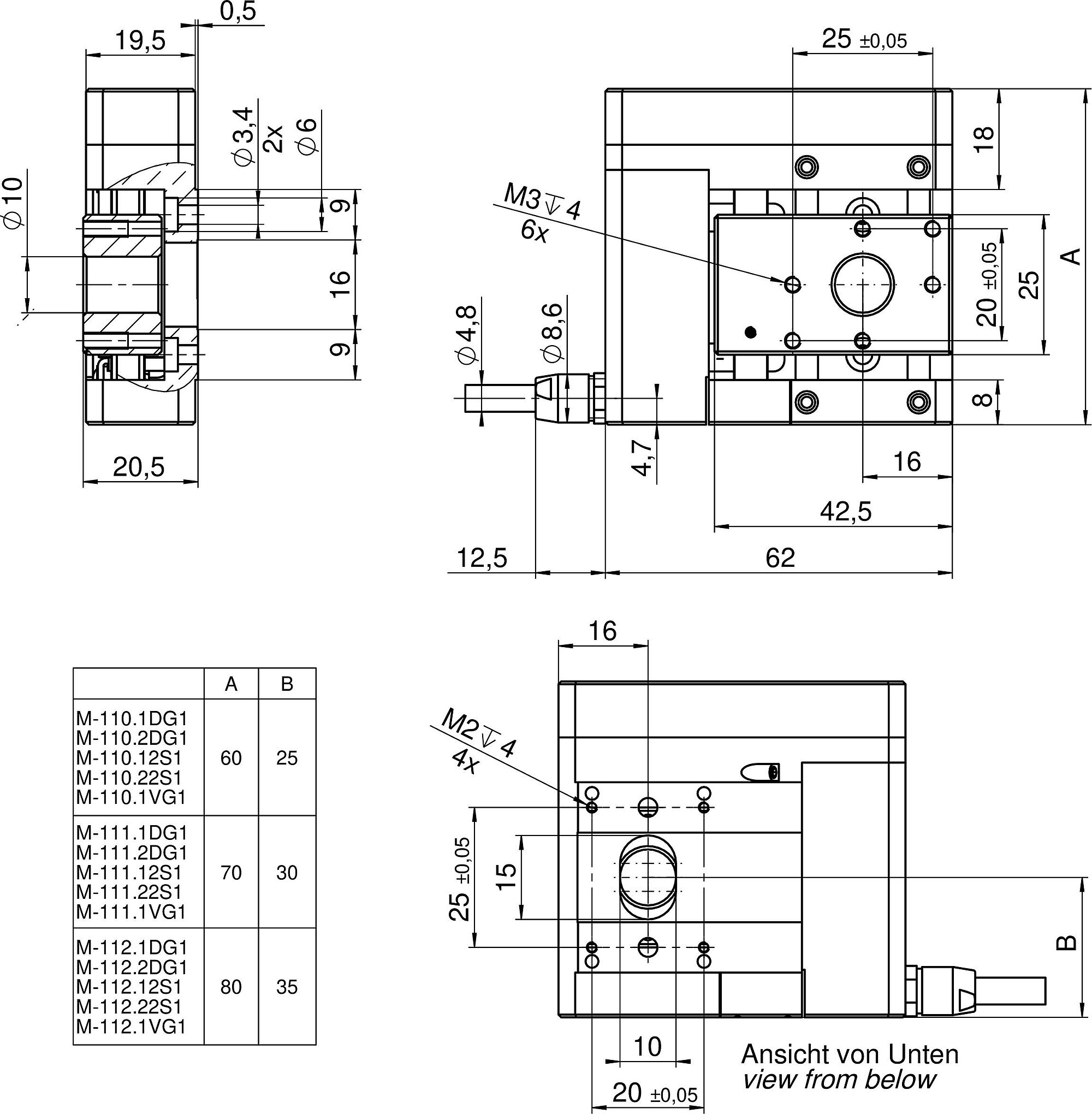
| Bewegen | M-110.1DG1 | M-110.2DG1 | M-110.12S1 | M-110.22S1 | M-111.1DG1 | M-111.2DG1 | M-111.12S1 | M-111.22S1 | M-112.1DG1 | M-112.2DG1 | M-112.12S1 | M-112.22S1 | Toleranz |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Aktive Achsen | X | X | X | X | X | X | X | X | X | X | X | X | |
| Stellweg in X | 5 mm | 5 mm | 5 mm | 5 mm | 15 mm | 15 mm | 15 mm | 15 mm | 25 mm | 25 mm | 25 mm | 25 mm | |
| Maximale Geschwindigkeit in X, unbelastet | 1 mm/s | 1,5 mm/s | 1 mm/s | 1 mm/s | 1,5 mm/s | 2 mm/s | 1 mm/s | 1 mm/s | 1,5 mm/s | 2 mm/s | 1 mm/s | 1 mm/s | |
| Positionieren | M-110.1DG1 | M-110.2DG1 | M-110.12S1 | M-110.22S1 | M-111.1DG1 | M-111.2DG1 | M-111.12S1 | M-111.22S1 | M-112.1DG1 | M-112.2DG1 | M-112.12S1 | M-112.22S1 | Toleranz |
| Unidirektionale Wiederholgenauigkeit in X | 0,25 µm | 0,15 µm | 0,25 µm | 0,15 µm | 0,25 µm | 0,15 µm | 0,25 µm | 0,15 µm | 0,25 µm | 0,15 µm | 0,25 µm | 0,15 µm | typ. |
| Bidirektionale Wiederholgenauigkeit in X | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | typ. |
| Kleinste Schrittweite in X | 0,05 µm | 0,2 µm | 0,02 µm | 0,2 µm | 0,05 µm | 0,2 µm | 0,02 µm | 0,2 µm | 0,05 µm | 0,2 µm | 0,02 µm | 0,2 µm | typ. |
| Umkehrspiel in X | 3 µm | 3 µm | 3 µm | 3 µm | 3 µm | 3 µm | 3 µm | 3 µm | 3 µm | 3 µm | 3 µm | 3 µm | typ. |
| Referenzschalter | Hall-Effekt | Hall-Effekt | Hall-Effekt | Hall-Effekt | Hall-Effekt | Hall-Effekt | Hall-Effekt | Hall-Effekt | Hall-Effekt | Hall-Effekt | Hall-Effekt | Hall-Effekt | |
| Endschalter | Hall-Effekt | Hall-Effekt | Hall-Effekt | Hall-Effekt | Hall-Effekt | Hall-Effekt | Hall-Effekt | Hall-Effekt | Hall-Effekt | Hall-Effekt | Hall-Effekt | Hall-Effekt | |
| Motorencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | |||||||
| Auflösung Motorencoder | 2048 Impulse/U | 2048 Impulse/U | 2048 Impulse/U | 2048 Impulse/U | 2048 Impulse/U | 2048 Impulse/U | |||||||
| Sensorsignal Motorencoder | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | |||||||
| Antriebseigenschaften | M-110.1DG1 | M-110.2DG1 | M-110.12S1 | M-110.22S1 | M-111.1DG1 | M-111.2DG1 | M-111.12S1 | M-111.22S1 | M-112.1DG1 | M-112.2DG1 | M-112.12S1 | M-112.22S1 | Toleranz |
| Antriebstyp | DC-Getriebemotor | DC-Getriebemotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | DC-Getriebemotor | DC-Getriebemotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | DC-Getriebemotor | DC-Getriebemotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | |
| Nennspannung | 12 V | 12 V | 12 V | 12 V | 12 V | 12 V | |||||||
| Nennstrom, effektiv | 0,16 A | 0,16 A | 0,25 A | 0,25 A | 0,32 A | 0,32 A | 0,25 A | 0,25 A | 0,32 A | 0,32 A | 0,25 A | 0,25 A | typ. |
| Antriebskraft in negativer Bewegungsrichtung in X | 10 N | 10 N | 10 N | 10 N | 10 N | 10 N | 10 N | 10 N | 10 N | 10 N | 10 N | 10 N | typ. |
| Antriebskraft in positiver Bewegungsrichtung in X | 10 N | 10 N | 10 N | 10 N | 10 N | 10 N | 10 N | 10 N | 10 N | 10 N | 10 N | 10 N | typ. |
| Motorauflösung | 24 Vollschritte/U | 24 Vollschritte/U | 24 Vollschritte/U | 24 Vollschritte/U | 24 Vollschritte/U | 24 Vollschritte/U | |||||||
| Mechanische Eigenschaften | M-110.1DG1 | M-110.2DG1 | M-110.12S1 | M-110.22S1 | M-111.1DG1 | M-111.2DG1 | M-111.12S1 | M-111.22S1 | M-112.1DG1 | M-112.2DG1 | M-112.12S1 | M-112.22S1 | Toleranz |
| Führung | Kugelführung | Kugelführung | Kugelführung | Kugelführung | Kugelführung | Kugelführung | Kugelführung | Kugelführung | Kugelführung | Kugelführung | Kugelführung | Kugelführung | |
| Spindeltyp | Feingewindespindel | Kugelumlaufspindel | Feingewindespindel | Kugelumlaufspindel | Feingewindespindel | Kugelumlaufspindel | Feingewindespindel | Kugelumlaufspindel | Feingewindespindel | Kugelumlaufspindel | Feingewindespindel | Kugelumlaufspindel | |
| Spindelsteigung | 0,4 mm | 0,5 mm | 0,4 mm | 0,5 mm | 0,4 mm | 0,5 mm | 0,4 mm | 0,5 mm | 0,4 mm | 0,5 mm | 0,4 mm | 0,5 mm | |
| Getriebeuntersetzung i | 256 : 9 | 256 : 9 | 256 : 9 | 256 : 9 | 256 : 9 | 256 : 9 | 256 : 9 | 256 : 9 | 256 : 9 | 256 : 9 | 256 : 9 | 256 : 9 | |
| Bewegte Masse in X, unbelastet | 11 g | 12 g | 11 g | 12 g | 11 g | 12 g | 11 g | 12 g | 11 g | 12 g | 11 g | 12 g | |
| Zulässige Druckkraft in Y | 15 N | 15 N | 15 N | 15 N | 10 N | 10 N | 10 N | 10 N | 10 N | 10 N | 10 N | 10 N | max. |
| Zulässige Druckkraft in Z | 30 N | 30 N | 30 N | 30 N | 30 N | 30 N | 30 N | 30 N | 20 N | 20 N | 20 N | 20 N | max. |
| Zulässiges Moment in θX | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | max. |
| Zulässiges Moment in θY | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | max. |
| Zulässiges Moment in θZ | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | 0,15 N·m | max. |
| Gesamtmasse | 250 g | 250 g | 250 g | 250 g | 270 g | 270 g | 270 g | 270 g | 300 g | 300 g | 300 g | 300 g | |
| Material | Aluminium eloxiert | Aluminium eloxiert | Aluminium eloxiert | Aluminium eloxiert | Aluminium eloxiert | Aluminium eloxiert | Aluminium eloxiert | Aluminium eloxiert | Aluminium eloxiert | Aluminium eloxiert | Aluminium eloxiert | Aluminium eloxiert | |
| Haltekraft in X, passiv | 10 N | 10 N | 10 N | 10 N | 10 N | 10 N | |||||||
| Anschlüsse und Umgebung | M-110.1DG1 | M-110.2DG1 | M-110.12S1 | M-110.22S1 | M-111.1DG1 | M-111.2DG1 | M-111.12S1 | M-111.22S1 | M-112.1DG1 | M-112.2DG1 | M-112.12S1 | M-112.22S1 | Toleranz |
| Anschluss | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | |
| Empfohlene Controller / Treiber | C-863 C-884 G-901 G-910 Modularer ACS-Controller | C-863 C-884 G-901 G-910 Modularer ACS-Controller | C-663 G-901 G-910 Modularer ACS-Controller | C-663 G-901 G-910 Modularer ACS-Controller | C-863 C-884 G-901 G-910 Modularer ACS-Controller | C-863 C-884 G-901 G-910 Modularer ACS-Controller | C-663 G-901 G-910 Modularer ACS-Controller | C-663 G-901 G-910 Modularer ACS-Controller | C-863 C-884 G-901 G-910 Modularer ACS-Controller | C-863 C-884 G-901 G-910 Modularer ACS-Controller | C-663 G-901 G-910 Modularer ACS-Controller | C-663 G-901 G-910 Modularer ACS-Controller | |
| Kabellänge | 0,5 m | 0,5 m | 0,5 m | 0,5 m | 0,5 m | 0,5 m | 0,5 m | 0,5 m | 0,5 m | 0,5 m | 0,5 m | 0,5 m | |
| Betriebstemperaturbereich | -20 bis 65 °C | -20 bis 65 °C | -20 bis 65 °C | -20 bis 65 °C | -20 bis 65 °C | -20 bis 65 °C | -20 bis 65 °C | -20 bis 65 °C | -20 bis 65 °C | -20 bis 65 °C | -20 bis 65 °C | -20 bis 65 °C |
Hinweis zu kleinster Schrittweite: Werte werden mit empfohlenem Controller erreicht
Hinweis zu Nennstrom: Werte gelten pro Phase
M-110.xxx1 / M-111.xxx1 / M-112.xxx1 Mikrostelltisch
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Kompakter Lineartisch; DC-Getriebemotor; 5 mm Stellweg; 30 N Belastbarkeit; 1 mm/s maximale Geschwindigkeit; Feingewindespindel; Inkrementeller Rotationsencoder, 2048 Impulse/U Auflösung; 0,5 m Kabellänge
Kompakter Lineartisch; DC-Getriebemotor; 5 mm Stellweg; 30 N Belastbarkeit; 1,5 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 2048 Impulse/U Auflösung; 0,5 m Kabellänge
Kompakter Lineartisch; 2-Phasen-Schrittmotor; 5 mm Stellweg; 30 N Belastbarkeit; 1 mm/s maximale Geschwindigkeit; Feingewindespindel; 0,5 m Kabellänge
Kompakter Lineartisch; 2-Phasen-Schrittmotor; 5 mm Stellweg; 30 N Belastbarkeit; 1 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; 0,5 m Kabellänge
Kompakter Lineartisch; DC-Getriebemotor; 15 mm Stellweg; 30 N Belastbarkeit; 1,5 mm/s maximale Geschwindigkeit; Feingewindespindel; Inkrementeller Rotationsencoder, 2048 Impulse/U Auflösung; 0,5 m Kabellänge
Kompakter Lineartisch; DC-Getriebemotor; 15 mm Stellweg; 30 N Belastbarkeit; 2 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 2048 Impulse/U Auflösung; 0,5 m Kabellänge
Kompakter Lineartisch; 2-Phasen-Schrittmotor; 15 mm Stellweg; 30 N Belastbarkeit; 1 mm/s maximale Geschwindigkeit; Feingewindespindel; 0,5 m Kabellänge
Kompakter Lineartisch; 2-Phasen-Schrittmotor; 15 mm Stellweg; 30 N Belastbarkeit; 1 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; 0,5 m Kabellänge
Kompakter Lineartisch; DC-Getriebemotor; 25 mm Stellweg; 20 N Belastbarkeit; 1,5 mm/s maximale Geschwindigkeit; Feingewindespindel; Inkrementeller Rotationsencoder, 2048 Impulse/U Auflösung; 0,5 m Kabellänge
Kompakter Lineartisch; DC-Getriebemotor; 25 mm Stellweg; 20 N Belastbarkeit; 2 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 2048 Impulse/U Auflösung; 0,5 m Kabellänge
Kompakter Lineartisch; 2-Phasen-Schrittmotor; 25 mm Stellweg; 20 N Belastbarkeit; 1 mm/s maximale Geschwindigkeit; Feingewindespindel; 0,5 m Kabellänge
Kompakter Lineartisch; 2-Phasen-Schrittmotor; 25 mm Stellweg; 20 N Belastbarkeit; 1 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; 0,5 m Kabellänge