|
Funktion
|
ACS-Treibermodul UDMnt, mit Anschlüssen für Positionierer von PI
|
|
|
|
Ausführung
|
G-910.RC01xxxxx: TischgerätG-910.RC03xxxxx: Schaltschrankmodul
|
|
|
|
Motortypen
|
2- und 3-phasige AC-Servomotoren / bürstenlose DC-Motoren, bürstenbehaftete DC-Motoren, Voice-Coil-Motoren, Schrittmotoren
|
|
|
|
Anzahl Antriebsachsen
|
2
|
|
|
|
Bewegung und Regler
|
G-910.RC0102100 / G-910.RC0102200 / G-910.RC0302200
|
|
|
|
Reglertyp
|
Kaskadierte PIV-Reglerstruktur mit Geschwindigkeits- und Beschleunigungs-Vorsteuerung
|
|
|
|
Abtastrate Stromregelung
|
20 kHz
|
|
|
|
Regelungsalgorithmen
|
Gantry Control, Dual Loop Control
|
|
|
|
Encoder
|
1 × je Achse, unterstützte Typen:Inkrementell: 1Vss, RS-422Absolut: EnDat 2.2 & 2.1, Smart-Abs, Panasonic, BiSS-A/B/C (SSI)
|
|
|
|
Endschalter
|
2 × je AchseStandard: 5 V Sinking (NPN)Optionale Konfiguration: 24 V; Sourcing (PNP)
|
|
|
|
Referenzschalter
|
Standard: 1 × je Achse, 5 V Sinking (NPN)Optionale Konfiguration: 24 V; Sourcing (PNP); Nutzung als digitale Mehrzweck-Eingänge auf HD-D-Sub 15 (f)
|
|
|
|
Motorbremse
|
1 × je AchseIntegrierter PWM-Bremsentreiber mit Stromreduzierung für verringerte Erwärmung der Bremse
|
|
|
|
Elektrische Eigenschaften
|
G-910.RC0102100
|
G-910.RC0102200
|
G-910.RC0302200
|
|
Ausgangsspannung (Zwischenkreis)*
|
24 V
|
48 V
|
12 V bis 60 V
|
|
Max. Ausgangsleistung (Zwischenkreis)*
|
120 W je Achse
|
280 W je Achse
|
480 W je Achse (bei 60 V DC, 8 A Eingangsstrom)
|
|
Strombegrenzung pro Motorphase (Amplitude Sinus), Dauer/Spitze (max. 1 s)
|
5 A / 9,5 A Spitze**
|
5 A / 9,5 A Spitze**
|
5 A Dauer / 10 A Spitze
|
|
Schnittstellen und Bedienung
|
G-910.RC0102100 / G-910.RC0102200 / G-910.RC0302200
|
|
|
|
Motoranschluss
|
2 × HD D-Sub 26 (f)
|
|
|
|
Sensoranschluss
|
2 × D-Sub 15 (m) oder 2 × über die MotoranschlüsseWerkseitige Standardkonfiguration bei Auslieferung:Digitaler inkrementeller Encoder (RS-422) oder Absolutencoder auf MotoranschlussInkrementeller Encoder 1 Vss auf D-Sub 15 (m)Werkseitige Standardkonfiguration bei Auslieferung:Digitaler inkrementeller Encoder (RS-422) oder Absolutencoder auf D-Sub 15 (m)
|
|
|
|
Digitale I/O-Leitungen
|
HD D-Sub 15 (f):2 × Ausgänge PNP 24 V Source; steuern auch die Bremsentreiber an den MotoranschlüssenStandard für Eingänge:2 × PNP 24 V Source auf HD D-Sub 15 (f); zusätzlich 2 × NPN 5 V Sinking für Referenzschalter auf den MotoranschlüssenOptionale Konfiguration für Eingänge:4 × PNP 24 V Source auf HD D-Sub 15 (f)
|
|
|
|
Analoge I/O-Leitungen
|
HD D-Sub 15 (m):2 differenzielle analoge Eingänge: ±10 V, 12 Bit1 differenzieller analoger Ausgang: ±10 V, 10 Bit
|
|
|
|
Ausgänge für Position Event Generator (PEG)
|
Parallel auf HD D-Sub 15 (m) und HD D-Sub 15 (f):2 differenzielle Ausgänge (RS-422) für Pulse an programmierbaren Positionen, Pulsbreite 26 ns bis 1,75 ms, max. 10 MHz; nur möglich mit inkrementellem Encoder
|
|
|
|
Kommunikations-Schnittstellen
|
EtherCAT
|
|
|
|
Umgebung
|
G-910.RC0102100
|
G-910.RC0102200
|
G-910.RC0302200
|
|
Betriebsspannung Zwischenkreis
|
24 V DC von externem Netzteil, Netzteil mit 24 V DC (120 W) im Lieferumfang
|
48 V DC von externem Netzteil, Netzteil mit 48 V DC (280 W) im Lieferumfang
|
12 V bis 60 V DC von externem Netzteil, nicht im Lieferumfang
|
|
Betriebsspannung Logik
|
24 V DC von externem Netzteil, Netzteil mit 24 V DC (120 W) im Lieferumfang
|
24 V DC von externem Netzteil, Netzteil mit 24 V DC (120 W) im Lieferumfang
|
24 V DC von externem Netzteil, nicht im Lieferumfang
|
|
Max. Stromaufnahme Zwischenkreis
|
5 A*
|
5 A*
| <8,6 A
|
|
Max. Stromaufnahme Logik
|
0,9 A
|
0,9 A
|
0,9 A
|
|
Betriebstemperaturbereich
|
5 °C bis 40 °C (Temperaturschutz schaltet bei zu hohen Temperaturen ab)
|
5 °C bis 40 °C (Temperaturschutz schaltet bei zu hohen Temperaturen ab)
|
5 °C bis 40 °C (Temperaturschutz schaltet bei zu hohen Temperaturen ab)
|
|
Masse
|
1,55 kg
|
1,55 kg
|
1,4 kg
|
|
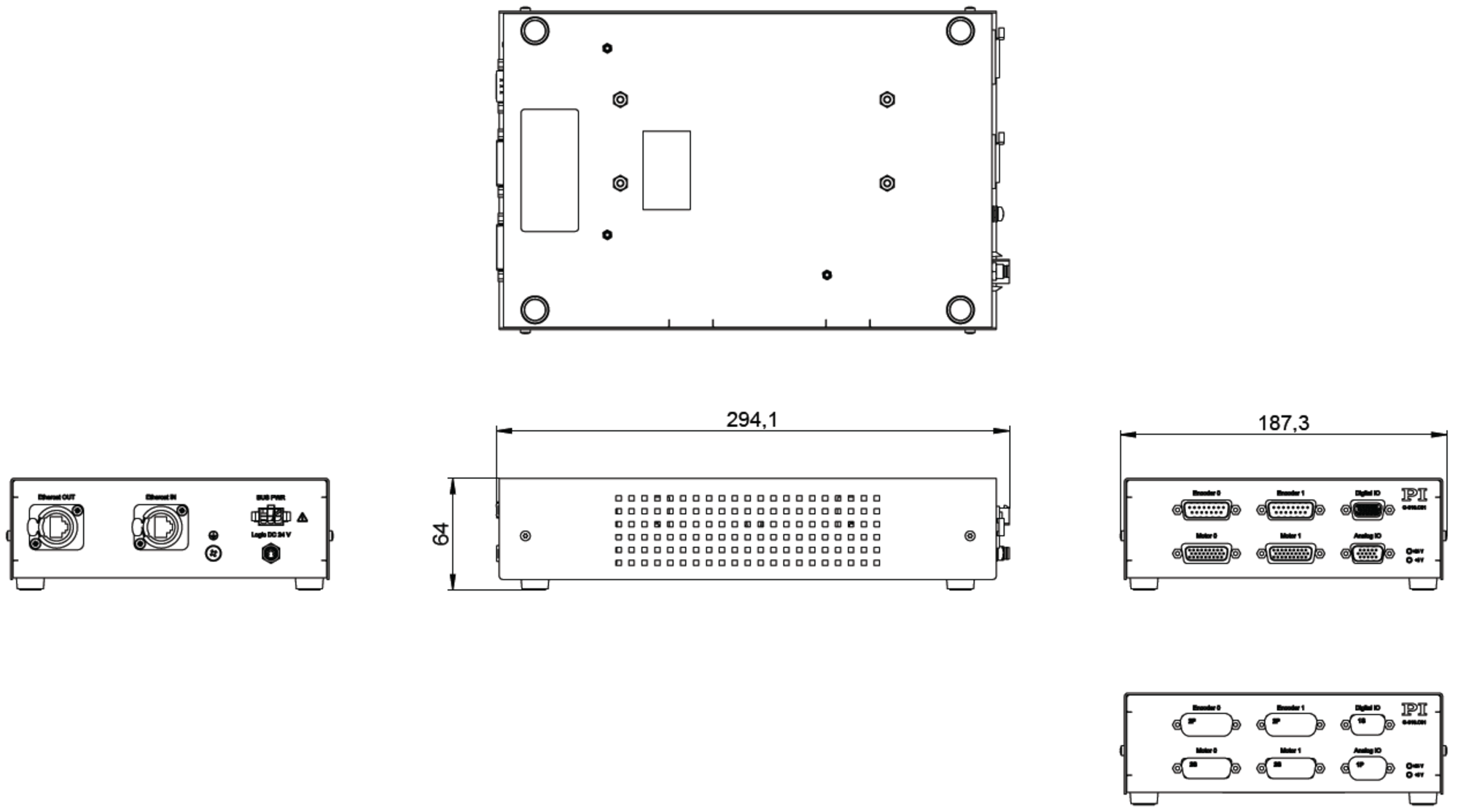
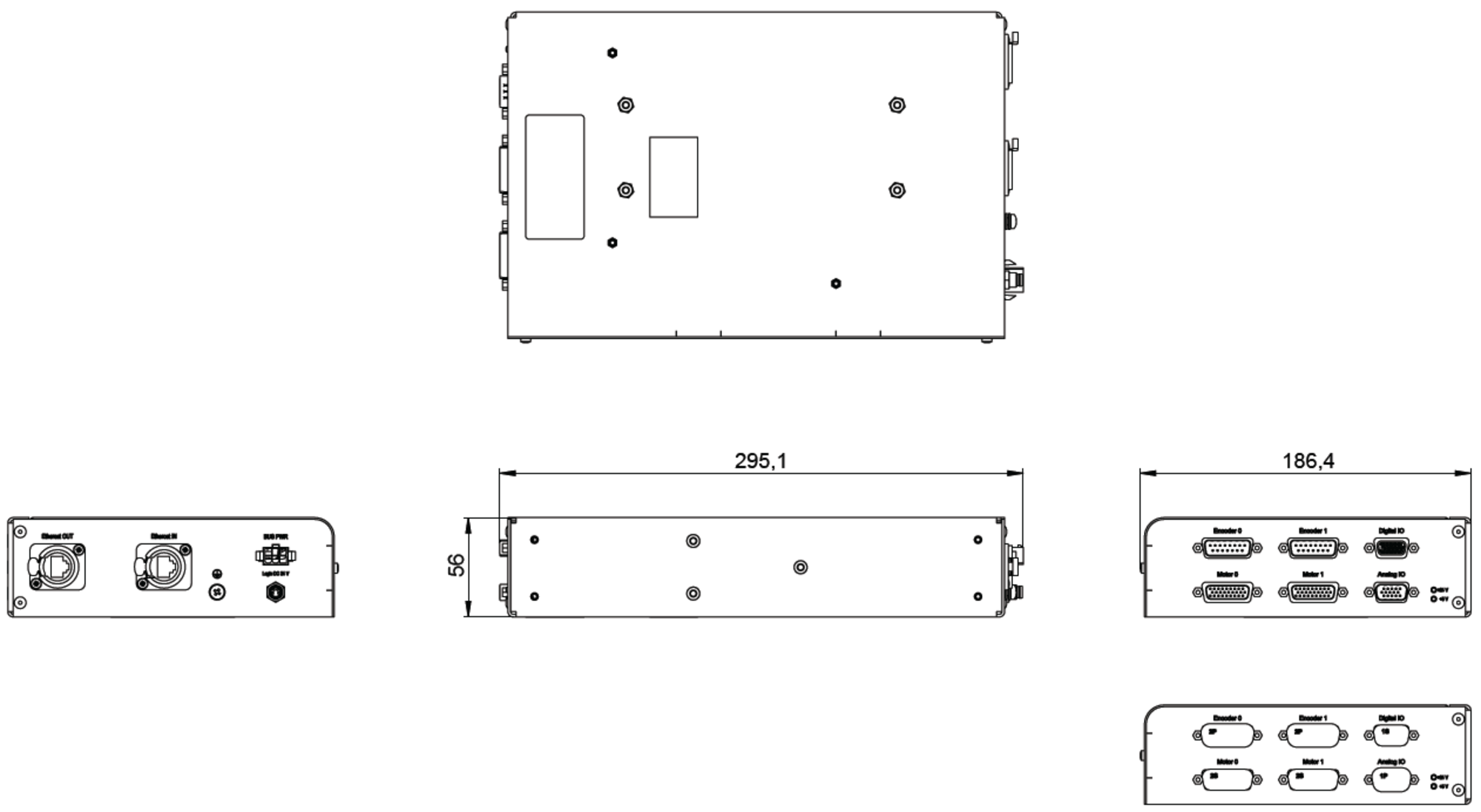
Abmessungen
|
187,3 mm × 64 mm × 294,1 mm
|
187,3 mm × 64 mm × 294,1 mm
|
186,4 mm × 56 mm × 295,2 mm
|