
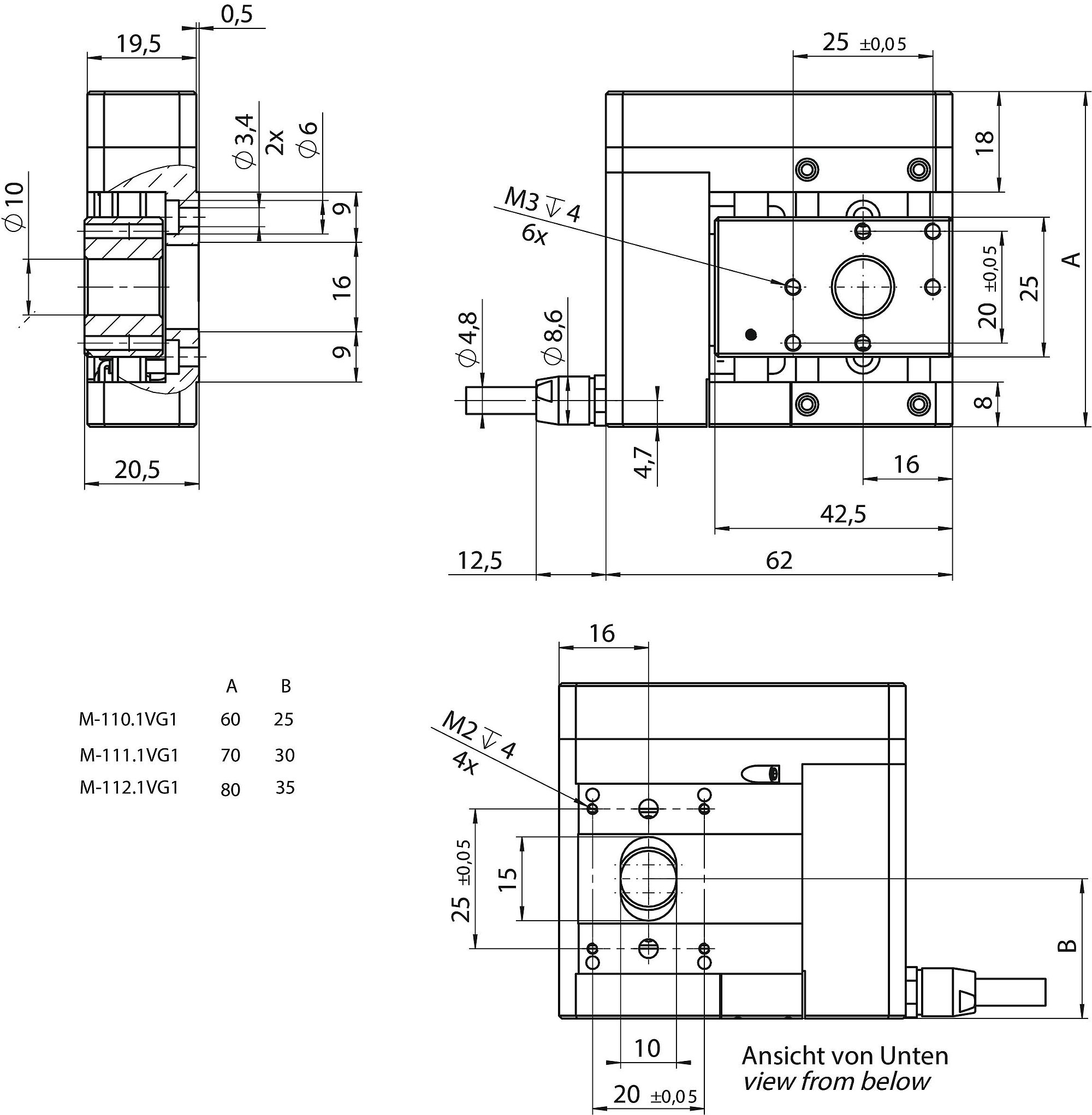


M-110.1VG1
Vakuumgeeigneter kompakter Lineartisch; DC-Getriebemotor; 5 mm Stellweg; 30 N Belastbarkeit; 1 mm/s maximale Geschwindigkeit; Feingewindespindel; Inkrementeller Rotationsencoder, 2048 Impulse/U Auflösung, A/B-Quadratur, RS-422; vakuumkompatibel bis 10-6 hPa; 0,5 m Kabellänge













