
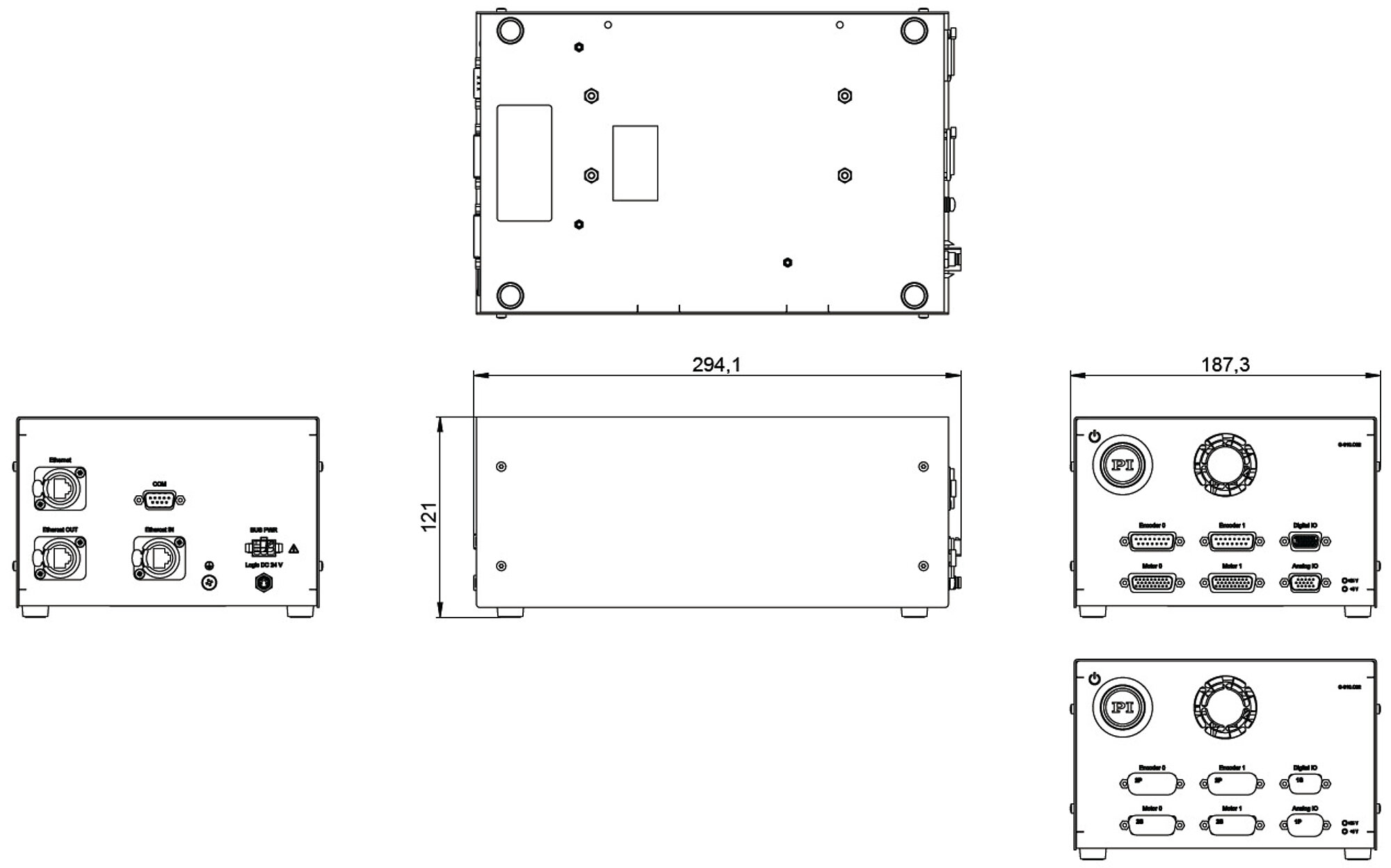




G-910.RC0242100
ACS-Controller mit ACS-Treibermodul, 2 Achsen, Zwischenkreisspannung 24 V DC, Logikspannung 24 V DC, Tischgerät, integrierter ACS SP+EC-04040432NNNDNDNN Motion Controller + EtherCAT-Master, integrierte ACS UDMNT2B220U2N Endstufe, EtherCAT-, Ethernet-, RS-232-Schnittstellen


















