L-509.023111
Präzisions-Lineartisch; DC-Motor; 26 mm Stellweg; 100 N Belastbarkeit; 50 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 20 µm Sensorsignalperiode, Sin/Cos, 1 V Spitze-Spitze










Produktübersicht
Hohe Ablaufgenauigkeit und Belastbarkeit durch Kreuzrollenführungen mit Käfig-Zwangsführung. Präzisions-Kugelumlaufspindel mit 1 mm Steigung. Kompaktes Design. Grundprofil aus entspanntem Aluminium für hohe Stabilität. Kontaktlose optische Endschalter. Kontaktloser optischer Referenzschalter mit Richtungserkennung in der Mitte des Stellwegs. Stellwege von 26 bis 102 mm (1" bis 4"), vakuumkompatible Artikel verfügbar.
Erhältliche Motortypen
Arten der Positionsmessung
Hochgenaue Positionsmessung mit inkrementellem Linearencoder
Kontaktlose optische Linearencoder messen die Position mit höchster Genauigkeit direkt an der Plattform. Nichtlinearitäten, mechanisches Spiel oder elastische Deformation beeinflussen die Messung nicht.
Einsatzgebiete
Autofokus. Laserschneiden. Forschung. Biotechnologie. Automatisierung. Optische Justage.
| Bewegen | L-509.023111 | L-509.033111 | L-509.053111 | L-509.023132 | L-509.033132 | L-509.053132 | L-509.025132 | L-509.035132 | L-509.055132 | L-509.10DG10 | L-509.20DG10 | L-509.40DG10 | L-509.10SD00 | L-509.20SD00 | L-509.40SD00 | L-509.1ASD00 | L-509.2ASD00 | L-509.4ASD00 | Toleranz |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Aktive Achsen | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | |
| Stellweg in X | 26 mm | 52 mm | 102 mm | 26 mm | 52 mm | 102 mm | 26 mm | 52 mm | 102 mm | 26 mm | 52 mm | 102 mm | 26 mm | 52 mm | 102 mm | 26 mm | 52 mm | 102 mm | |
| Maximale Geschwindigkeit in X, unbelastet | 50 mm/s | 50 mm/s | 50 mm/s | 50 mm/s | 50 mm/s | 50 mm/s | 50 mm/s | 50 mm/s | 50 mm/s | 3 mm/s | 3 mm/s | 3 mm/s | 20 mm/s | 20 mm/s | 20 mm/s | 20 mm/s | 20 mm/s | 20 mm/s | |
| Geradheitsabweichung in Y (Geradheit) | ± 1 µm | ± 2 µm | ± 4 µm | ± 1 µm | ± 2 µm | ± 4 µm | ± 1 µm | ± 2 µm | ± 4 µm | ± 1 µm | ± 2 µm | ± 4 µm | ± 1 µm | ± 2 µm | ± 4 µm | ± 1 µm | ± 2 µm | ± 4 µm | typ. |
| Geradheitsabweichung in Z (Ebenheit) | ± 1 µm | ± 2 µm | ± 4 µm | ± 1 µm | ± 2 µm | ± 4 µm | ± 1 µm | ± 2 µm | ± 4 µm | ± 1 µm | ± 2 µm | ± 4 µm | ± 1 µm | ± 2 µm | ± 4 µm | ± 1 µm | ± 2 µm | ± 4 µm | typ. |
| Winkelabweichung um Y (Nicken) | ± 40 µrad | ± 65 µrad | ± 90 µrad | ± 40 µrad | ± 65 µrad | ± 90 µrad | ± 40 µrad | ± 65 µrad | ± 90 µrad | ± 40 µrad | ± 65 µrad | ± 90 µrad | ± 40 µrad | ± 65 µrad | ± 90 µrad | ± 40 µrad | ± 65 µrad | ± 90 µrad | max. |
| Winkelabweichung um Z (Gieren) | ± 60 µrad | ± 90 µrad | ± 120 µrad | ± 60 µrad | ± 90 µrad | ± 120 µrad | ± 60 µrad | ± 90 µrad | ± 120 µrad | ± 60 µrad | ± 90 µrad | ± 120 µrad | ± 60 µrad | ± 90 µrad | ± 120 µrad | ± 60 µrad | ± 90 µrad | ± 120 µrad | max. |
| Positionieren | L-509.023111 | L-509.033111 | L-509.053111 | L-509.023132 | L-509.033132 | L-509.053132 | L-509.025132 | L-509.035132 | L-509.055132 | L-509.10DG10 | L-509.20DG10 | L-509.40DG10 | L-509.10SD00 | L-509.20SD00 | L-509.40SD00 | L-509.1ASD00 | L-509.2ASD00 | L-509.4ASD00 | Toleranz |
| Kleinste Schrittweite in X | 0,1 µm | 0,1 µm | 0,1 µm | 0,5 µm | 0,5 µm | 0,5 µm | 0,5 µm | 0,5 µm | 0,5 µm | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | 0,02 µm | 0,02 µm | 0,02 µm | typ. |
| Positioniergenauigkeit in X, unkalibriert | ± 7 µm | ± 8 µm | ± 10 µm | ± 9 µm | ± 14 µm | ± 19 µm | ± 9 µm | ± 14 µm | ± 19 µm | ± 9 µm | ± 14 µm | ± 19 µm | ± 10 µm | ± 15 µm | ± 20 µm | ± 7 µm | ± 8 µm | ± 10 µm | max. |
| Unidirektionale Wiederholgenauigkeit in X | ± 0,15 µm | ± 0,15 µm | ± 0,15 µm | ± 0,2 µm | ± 0,2 µm | ± 0,2 µm | ± 0,2 µm | ± 0,2 µm | ± 0,2 µm | ± 0,25 µm | ± 0,25 µm | ± 0,25 µm | ± 0,25 µm | ± 0,25 µm | ± 0,25 µm | ± 0,15 µm | ± 0,15 µm | ± 0,15 µm | max. |
| Bidirektionale Wiederholgenauigkeit in X | 0,8 µm | 0,8 µm | 0,8 µm | 1,25 µm | 1,25 µm | 1,25 µm | 1,25 µm | 1,25 µm | 1,25 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 0,8 µm | 0,8 µm | 0,8 µm | max. |
| Referenzschalter | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | |
| Endschalter | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | |
| Integrierter Sensor | Inkrementeller Linearencoder | Inkrementeller Linearencoder | Inkrementeller Linearencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | — | — | — | Inkrementeller Linearencoder | Inkrementeller Linearencoder | Inkrementeller Linearencoder | |
| Sensorsignal | Sin/Cos, 1 V Spitze-Spitze | Sin/Cos, 1 V Spitze-Spitze | Sin/Cos, 1 V Spitze-Spitze | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | — | — | — | Sin/Cos, 1 V Spitze-Spitze | Sin/Cos, 1 V Spitze-Spitze | Sin/Cos, 1 V Spitze-Spitze | |
| Sensorsignalperiode | 20 µm | 20 µm | 20 µm | — | — | — | — | — | — | — | — | — | — | — | — | 20 µm | 20 µm | 20 µm | |
| Antriebseigenschaften | L-509.023111 | L-509.033111 | L-509.053111 | L-509.023132 | L-509.033132 | L-509.053132 | L-509.025132 | L-509.035132 | L-509.055132 | L-509.10DG10 | L-509.20DG10 | L-509.40DG10 | L-509.10SD00 | L-509.20SD00 | L-509.40SD00 | L-509.1ASD00 | L-509.2ASD00 | L-509.4ASD00 | Toleranz |
| Antriebstyp | DC-Motor | DC-Motor | DC-Motor | DC-Motor | DC-Motor | DC-Motor | Bürstenloser DC-Motor | Bürstenloser DC-Motor | Bürstenloser DC-Motor | DC-Getriebemotor | DC-Getriebemotor | DC-Getriebemotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | |
| Nennspannung | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 12 V | 12 V | 12 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | |
| Maximale Leistungsaufnahme | — | — | — | — | — | — | — | — | — | 8,5 W | 8,5 W | 8,5 W | 10 W | 10 W | 10 W | 10 W | 10 W | 10 W | |
| Motorauflösung | — | — | — | — | — | — | — | — | — | — | — | — | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | |
| Antriebskraft in positiver Bewegungsrichtung in X | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | typ. |
| Antriebskraft in negativer Bewegungsrichtung in X | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | typ. |
| Widerstand Phase-Phase | — | — | — | — | — | — | 0,81 Ω | 0,81 Ω | 0,81 Ω | 4,09 Ω | 4,09 Ω | 4,09 Ω | 3,3 Ω | 3,3 Ω | 3,3 Ω | 3,3 Ω | 3,3 Ω | 3,3 Ω | typ. |
| Induktivität Phase-Phase | — | — | — | — | — | — | 0,64 mH | 0,64 mH | 0,64 mH | 0,18 mH | 0,18 mH | 0,18 mH | 2,8 mH | 2,8 mH | 2,8 mH | 2,8 mH | 2,8 mH | 2,8 mH | |
| Gegen-EMK Phase-Phase, rotatorisch | — | — | — | — | — | — | 3,3 V/kRPM | 3,3 V/kRPM | 3,3 V/kRPM | 1,68 V/kRPM | 1,68 V/kRPM | 1,68 V/kRPM | — | — | — | — | — | — | max. |
| Polpaarzahl | — | — | — | — | — | — | 7 | 7 | 7 | — | — | — | — | — | — | — | — | — | |
| Mechanische Eigenschaften | L-509.023111 | L-509.033111 | L-509.053111 | L-509.023132 | L-509.033132 | L-509.053132 | L-509.025132 | L-509.035132 | L-509.055132 | L-509.10DG10 | L-509.20DG10 | L-509.40DG10 | L-509.10SD00 | L-509.20SD00 | L-509.40SD00 | L-509.1ASD00 | L-509.2ASD00 | L-509.4ASD00 | Toleranz |
| Zulässige Druckkraft in Y | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | max. |
| Zulässige Druckkraft in Z | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | max. |
| Zulässiges Moment in θX | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | max. |
| Zulässiges Moment in θY | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | max. |
| Zulässiges Moment in θZ | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | max. |
| Haltekraft in X, passiv | — | — | — | — | — | — | — | — | — | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | |
| Bewegte Masse in X, unbelastet | 240 g | 240 g | 250 g | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | 240 g | 240 g | 250 g | |
| Spindeltyp | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | |
| Spindelsteigung | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | |
| Getriebeuntersetzung i | — | — | — | — | — | — | — | — | — | 2401 : 81 | 2401 : 81 | 2401 : 81 | — | — | — | — | — | — | |
| Führung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | |
| Gesamtmasse | 1200 g | 1300 g | 1500 g | 1200 g | 1300 g | 1500 g | 1400 g | 1500 g | 1700 g | 1400 g | 1600 g | 1900 g | 1400 g | 1500 g | 1700 g | 1400 g | 1600 g | 1800 g | |
| Material | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | |
| Anschlüsse und Umgebung | L-509.023111 | L-509.033111 | L-509.053111 | L-509.023132 | L-509.033132 | L-509.053132 | L-509.025132 | L-509.035132 | L-509.055132 | L-509.10DG10 | L-509.20DG10 | L-509.40DG10 | L-509.10SD00 | L-509.20SD00 | L-509.40SD00 | L-509.1ASD00 | L-509.2ASD00 | L-509.4ASD00 | Toleranz |
| Betriebstemperaturbereich | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | |
| Anschluss | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | |
| Sensoranschluss | D-Sub 9 (m) | D-Sub 9 (m) | D-Sub 9 (m) | — | — | — | — | — | — | — | — | — | — | — | — | D-Sub 9 (m) | D-Sub 9 (m) | D-Sub 9 (m) | |
| Empfohlene Controller/Treiber | C-863 C-885 mit C-863.20C885 C-884 G-901 G-910 | C-863 C-885 mit C-863.20C885 C-884 G-901 G-910 | C-863 C-885 mit C-863.20C885 C-884 G-901 G-910 | C-863 C-885 mit C-863.20C885 C-884 G-901 G-910 | C-863 C-885 mit C-863.20C885 C-884 G-901 G-910 | C-863 C-885 mit C-863.20C885 C-884 G-901 G-910 | C-891 C-885 mit C-891.11C885 G-901 G-910 | C-891 C-885 mit C-891.11C885 G-901 G-910 | C-891 C-885 mit C-891.11C885 G-901 G-910 | C-863 C-885 mit C-863.20C885 C-884 G-901 G-910 | C-863 C-885 mit C-863.20C885 C-884 G-901 G-910 | C-863 C-885 mit C-863.20C885 C-884 G-901 G-910 | C-663.12 C-885 mit C-663.12C885 G-901 G-910 | C-663.12 C-885 mit C-663.12C885 G-901 G-910 | C-663.12 C-885 mit C-663.12C885 G-901 G-910 | C-663.12 C-885 mit C-663.12C885 G-901 G-910 | C-663.12 C-885 mit C-663.12C885 G-901 G-910 | C-663.12 C-885 mit C-663.12C885 G-901 G-910 |
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
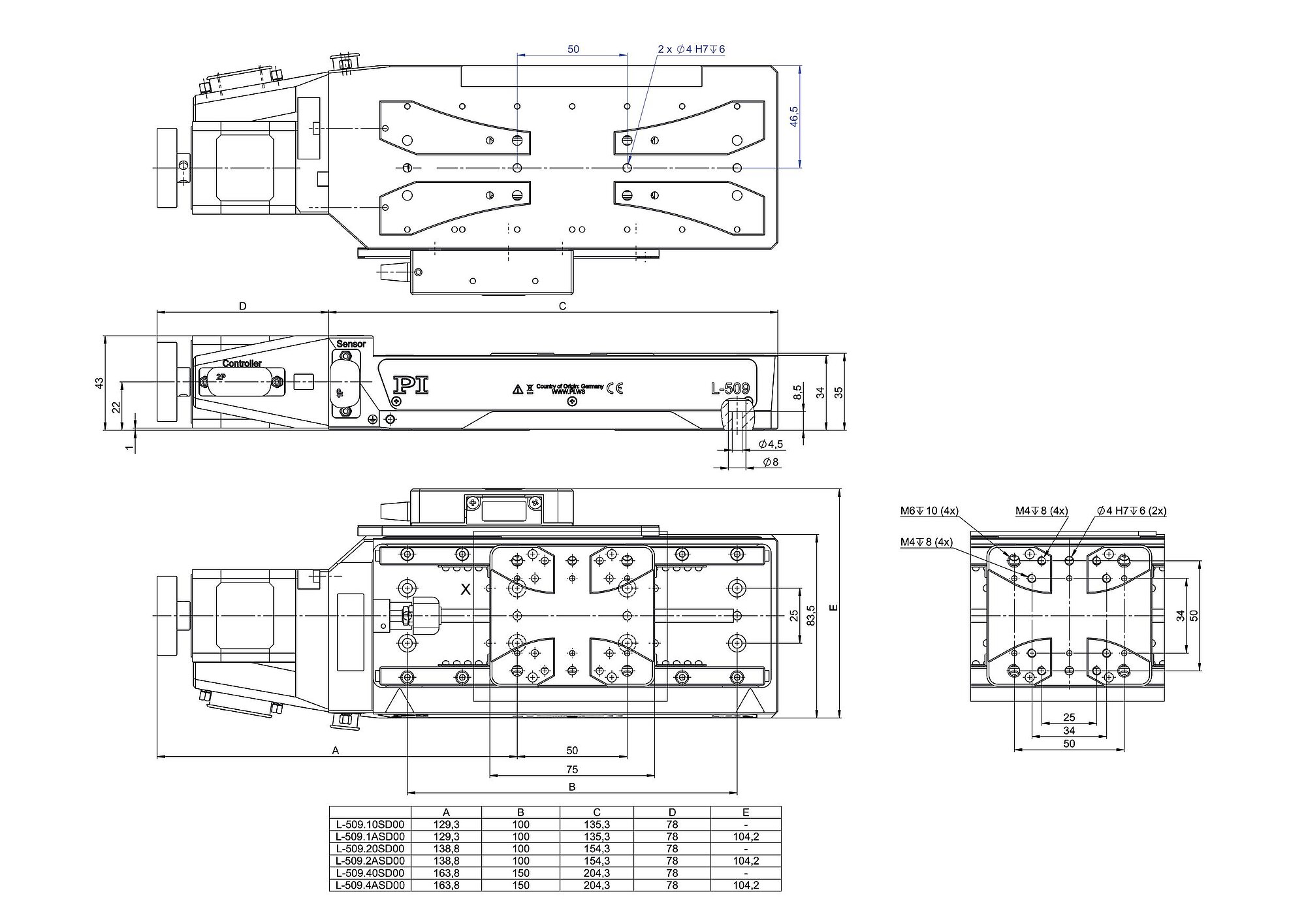
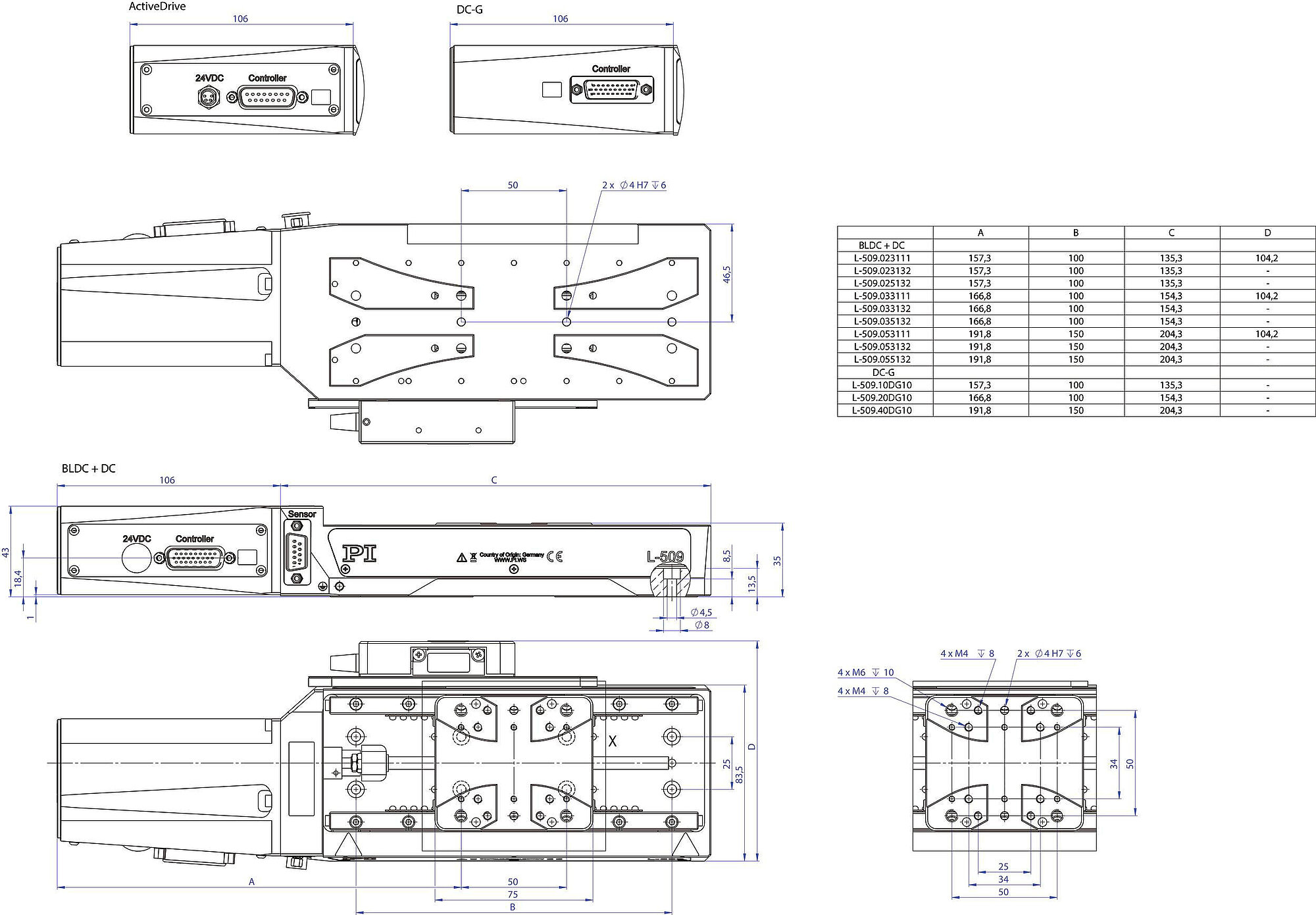
L-509 Präzisions-Lineartisch, 85 mm Breite
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Präzisions-Lineartisch; DC-Motor; 26 mm Stellweg; 100 N Belastbarkeit; 50 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 20 µm Sensorsignalperiode, Sin/Cos, 1 V Spitze-Spitze
Präzisions-Lineartisch; DC-Motor; 52 mm Stellweg; 100 N Belastbarkeit; 50 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 20 µm Sensorsignalperiode, Sin/Cos, 1 V Spitze-Spitze
Präzisions-Lineartisch; DC-Motor; 102 mm Stellweg; 100 N Belastbarkeit; 50 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 20 µm Sensorsignalperiode, Sin/Cos, 1 V Spitze-Spitze
Präzisions-Lineartisch; DC-Motor; 26 mm Stellweg; 100 N Belastbarkeit; 50 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, A/B-Quadratur, RS-422
Präzisions-Lineartisch; DC-Motor; 52 mm Stellweg; 100 N Belastbarkeit; 50 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, A/B-Quadratur, RS-422
Präzisions-Lineartisch; DC-Motor; 102 mm Stellweg; 100 N Belastbarkeit; 50 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, A/B-Quadratur, RS-422
Präzisions-Lineartisch; Bürstenloser DC-Motor; 26 mm Stellweg; 100 N Belastbarkeit; 50 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 20000 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Präzisions-Lineartisch; Bürstenloser DC-Motor; 52 mm Stellweg; 100 N Belastbarkeit; 50 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 20000 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Präzisions-Lineartisch; Bürstenloser DC-Motor; 102 mm Stellweg; 100 N Belastbarkeit; 50 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 20000 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Präzisions-Lineartisch; DC-Getriebemotor; 26 mm Stellweg; 100 N Belastbarkeit; 3 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 4096 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Präzisions-Lineartisch; DC-Getriebemotor; 52 mm Stellweg; 100 N Belastbarkeit; 3 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 4096 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Präzisions-Lineartisch; DC-Getriebemotor; 102 mm Stellweg; 100 N Belastbarkeit; 3 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 4096 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Präzisions-Lineartisch; 2-Phasen-Schrittmotor; 26 mm Stellweg; 100 N Belastbarkeit; 20 mm/s maximale Geschwindigkeit; Kugelumlaufspindel
Präzisions-Lineartisch; 2-Phasen-Schrittmotor; 52 mm Stellweg; 100 N Belastbarkeit; 20 mm/s maximale Geschwindigkeit; Kugelumlaufspindel
Präzisions-Lineartisch; 2-Phasen-Schrittmotor; 102 mm Stellweg; 100 N Belastbarkeit; 20 mm/s maximale Geschwindigkeit; Kugelumlaufspindel
Präzisions-Lineartisch; 2-Phasen-Schrittmotor; 26 mm Stellweg; 100 N Belastbarkeit; 20 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 20 µm Sensorsignalperiode, Sin/Cos, 1 V Spitze-Spitze
Präzisions-Lineartisch; 2-Phasen-Schrittmotor; 52 mm Stellweg; 100 N Belastbarkeit; 20 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 20 µm Sensorsignalperiode, Sin/Cos, 1 V Spitze-Spitze
Präzisions-Lineartisch; 2-Phasen-Schrittmotor; 102 mm Stellweg; 100 N Belastbarkeit; 20 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 20 µm Sensorsignalperiode, Sin/Cos, 1 V Spitze-Spitze
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.
















