|
Aktive Achsen
|
X
|
X
|
X
|
X
|
X
|
X
|
X
|
X
|
|
|
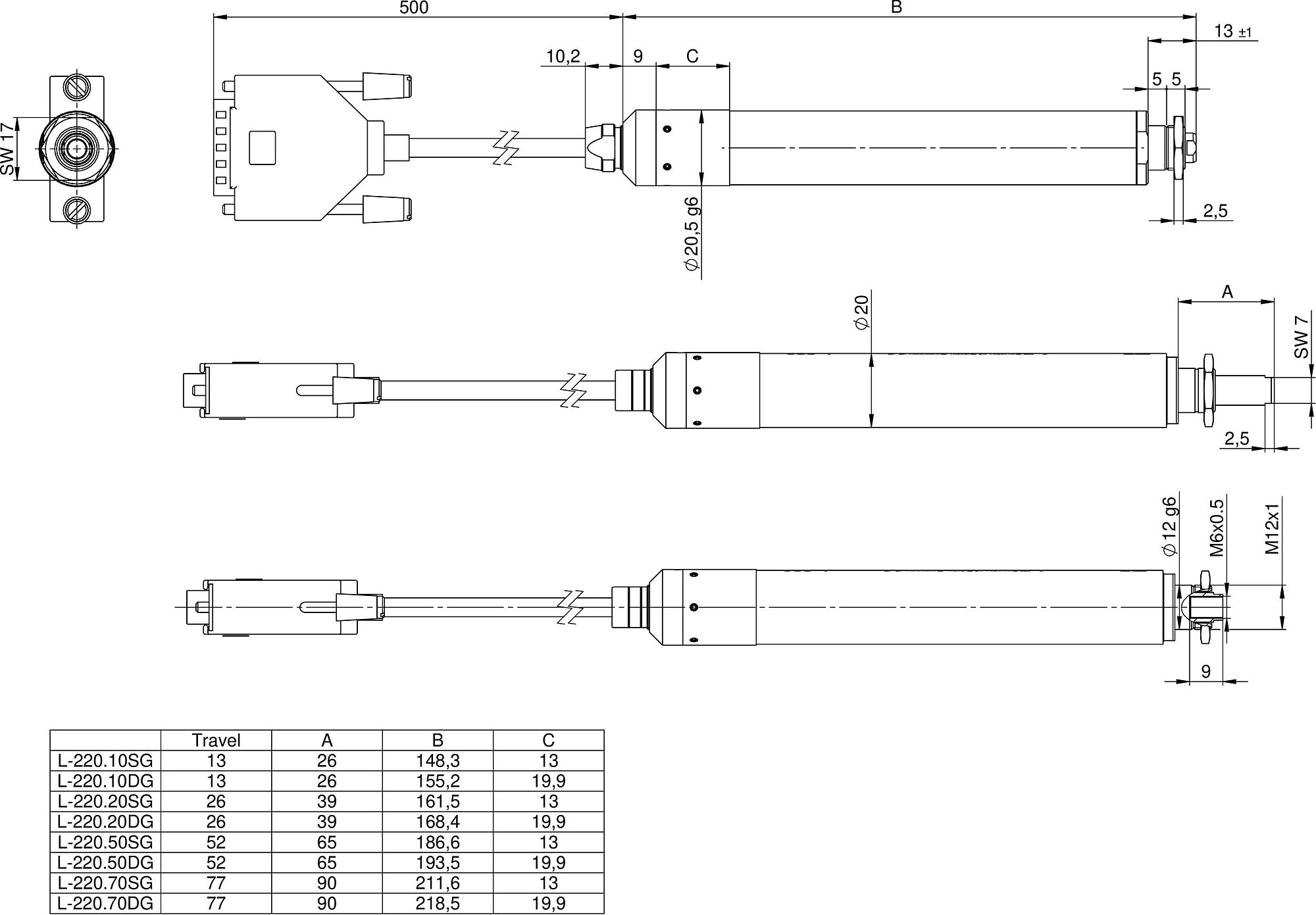
Stellweg in X
|
13 mm
|
26 mm
|
52 mm
|
77 mm
|
13 mm
|
26 mm
|
52 mm
|
77 mm
|
|
|
Maximale Geschwindigkeit in X, unbelastet
|
3,5 mm/s
|
3,5 mm/s
|
3,5 mm/s
|
3,5 mm/s
|
0,8 mm/s
|
0,8 mm/s
|
0,8 mm/s
|
0,8 mm/s
|
|
|
Positionieren
|
L-220.10DG
|
L-220.20DG
|
L-220.50DG
|
L-220.70DG
|
L-220.10SG
|
L-220.20SG
|
L-220.50SG
|
L-220.70SG
|
Toleranz
|
|
Kleinste Schrittweite in X
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
typ.
|
|
Unidirektionale Wiederholgenauigkeit in X
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
typ.
|
|
Bidirektionale Wiederholgenauigkeit in X
|
2 µm
|
2 µm
|
2 µm
|
2 µm
|
2 µm
|
2 µm
|
2 µm
|
2 µm
|
typ.
|
|
Referenzschalter
|
Hall-Effekt, Öffner, 5 V, NPN
|
Hall-Effekt, Öffner, 5 V, NPN
|
Hall-Effekt, Öffner, 5 V, NPN
|
Hall-Effekt, Öffner, 5 V, NPN
|
Hall-Effekt, Öffner, 5 V, NPN
|
Hall-Effekt, Öffner, 5 V, NPN
|
Hall-Effekt, Öffner, 5 V, NPN
|
Hall-Effekt, Öffner, 5 V, NPN
|
|
|
Endschalter
|
Hall-Effekt, Öffner, 5 V, NPN
|
Hall-Effekt, Öffner, 5 V, NPN
|
Hall-Effekt, Öffner, 5 V, NPN
|
Hall-Effekt, Öffner, 5 V, NPN
|
Hall-Effekt, Öffner, 5 V, NPN
|
Hall-Effekt, Öffner, 5 V, NPN
|
Hall-Effekt, Öffner, 5 V, NPN
|
Hall-Effekt, Öffner, 5 V, NPN
|
|
|
Motorencoder
|
Inkrementeller Rotationsencoder
|
Inkrementeller Rotationsencoder
|
Inkrementeller Rotationsencoder
|
Inkrementeller Rotationsencoder
|
—
|
—
|
—
|
—
|
|
|
Sensorsignal Motorencoder
|
A/B-Quadratur, RS-422
|
A/B-Quadratur, RS-422
|
A/B-Quadratur, RS-422
|
A/B-Quadratur, RS-422
|
—
|
—
|
—
|
—
|
|
|
Auflösung Motorencoder
|
512 Impulse/U
|
512 Impulse/U
|
512 Impulse/U
|
512 Impulse/U
|
—
|
—
|
—
|
—
|
|
|
Antriebseigenschaften
|
L-220.10DG
|
L-220.20DG
|
L-220.50DG
|
L-220.70DG
|
L-220.10SG
|
L-220.20SG
|
L-220.50SG
|
L-220.70SG
|
Toleranz
|
|
Antriebstyp
|
DC-Getriebemotor
|
DC-Getriebemotor
|
DC-Getriebemotor
|
DC-Getriebemotor
|
2-Phasen-Schrittmotor mit Getriebe
|
2-Phasen-Schrittmotor mit Getriebe
|
2-Phasen-Schrittmotor mit Getriebe
|
2-Phasen-Schrittmotor mit Getriebe
|
|
|
Nennspannung
|
12 V
|
12 V
|
12 V
|
12 V
|
3,5 V
|
3,5 V
|
3,5 V
|
3,5 V
|
|
|
Nennstrom, effektiv
|
0,28 A
|
0,28 A
|
0,28 A
|
0,28 A
|
0,25 A
|
0,25 A
|
0,25 A
|
0,25 A
|
typ.
|
|
Spitzenstrom, effektiv
|
0,56 A
|
0,56 A
|
0,56 A
|
0,56 A
|
—
|
—
|
—
|
—
|
typ.
|
|
Maximale Leistungsaufnahme
|
4 W
|
4 W
|
4 W
|
4 W
|
—
|
—
|
—
|
—
|
|
|
Motorauflösung
|
—
|
—
|
—
|
—
|
24 Vollschritte/U
|
24 Vollschritte/U
|
24 Vollschritte/U
|
24 Vollschritte/U
|
|
|
Antriebskraft in positiver Bewegungsrichtung in X
|
125 N
|
125 N
|
125 N
|
125 N
|
125 N
|
125 N
|
125 N
|
125 N
|
typ.
|
|
Antriebskraft in negativer Bewegungsrichtung in X
|
125 N
|
125 N
|
125 N
|
125 N
|
125 N
|
125 N
|
125 N
|
125 N
|
typ.
|
|
Drehmomentkonstante
|
0,0115 N·m/A
|
0,0115 N·m/A
|
0,0115 N·m/A
|
0,0115 N·m/A
|
—
|
—
|
—
|
—
|
typ.
|
|
Widerstand Phase-Phase
|
19,8 Ω
|
19,8 Ω
|
19,8 Ω
|
19,8 Ω
|
12,5 Ω
|
12,5 Ω
|
12,5 Ω
|
12,5 Ω
|
typ.
|
|
Induktivität Phase-Phase
|
0,42 mH
|
0,42 mH
|
0,42 mH
|
0,42 mH
|
6,3 mH
|
6,3 mH
|
6,3 mH
|
6,3 mH
|
|
|
Gegen-EMK Phase-Phase, rotatorisch
|
1,21 V/kRPM
|
1,21 V/kRPM
|
1,21 V/kRPM
|
1,21 V/kRPM
|
11 V/kRPM
|
11 V/kRPM
|
11 V/kRPM
|
11 V/kRPM
|
max.
|
|
Polpaarzahl
|
1
|
1
|
1
|
1
|
—
|
—
|
—
|
—
|
|
|
Mechanische Eigenschaften
|
L-220.10DG
|
L-220.20DG
|
L-220.50DG
|
L-220.70DG
|
L-220.10SG
|
L-220.20SG
|
L-220.50SG
|
L-220.70SG
|
Toleranz
|
|
Zulässige Druckkraft in Y
|
1 N
|
1 N
|
1 N
|
1 N
|
1 N
|
1 N
|
1 N
|
1 N
|
max.
|
|
Haltekraft in X, passiv
|
—
|
—
|
—
|
—
|
125 N
|
125 N
|
125 N
|
125 N
|
|
|
Bewegte Masse in X, unbelastet
|
20 g
|
20 g
|
25 g
|
30 g
|
20 g
|
20 g
|
25 g
|
30 g
|
|
|
Spindeltyp
|
Kugelumlaufspindel
|
Kugelumlaufspindel
|
Kugelumlaufspindel
|
Kugelumlaufspindel
|
Kugelumlaufspindel
|
Kugelumlaufspindel
|
Kugelumlaufspindel
|
Kugelumlaufspindel
|
|
|
Spindelsteigung
|
1 mm
|
1 mm
|
1 mm
|
1 mm
|
1 mm
|
1 mm
|
1 mm
|
1 mm
|
|
|
Getriebeuntersetzung i
|
12493 : 567
|
12493 : 567
|
12493 : 567
|
12493 : 567
|
387283 : 5103
|
387283 : 5103
|
387283 : 5103
|
387283 : 5103
|
|
|
Gesamtmasse
|
210 g
|
230 g
|
260 g
|
290 g
|
230 g
|
250 g
|
280 g
|
320 g
|
|
|
Material
| Edelstahl,Bronze | Edelstahl,Bronze | Edelstahl,Bronze | Edelstahl,Bronze | Edelstahl,Bronze | Edelstahl,Bronze | Edelstahl,Bronze | Edelstahl,Bronze |
|
|
Anschlüsse und Umgebung
|
L-220.10DG
|
L-220.20DG
|
L-220.50DG
|
L-220.70DG
|
L-220.10SG
|
L-220.20SG
|
L-220.50SG
|
L-220.70SG
|
Toleranz
|
|
Betriebstemperaturbereich
|
5 bis 40 °C
|
5 bis 40 °C
|
5 bis 40 °C
|
5 bis 40 °C
|
5 bis 40 °C
|
5 bis 40 °C
|
5 bis 40 °C
|
5 bis 40 °C
|
|
|
Anschluss
|
HD D-Sub 26 (m)
|
HD D-Sub 26 (m)
|
HD D-Sub 26 (m)
|
HD D-Sub 26 (m)
|
HD D-Sub 26 (m)
|
HD D-Sub 26 (m)
|
HD D-Sub 26 (m)
|
HD D-Sub 26 (m)
|
|
|
Kabellänge
|
0,5 m
|
0,5 m
|
0,5 m
|
0,5 m
|
0,5 m
|
0,5 m
|
0,5 m
|
0,5 m
|
|
|
Empfohlene Controller / Treiber
| C-863 C-885 mit C-863.20C885 C-884 Modularer ACS-Controller | C-863 C-885 mit C-863.20C885 C-884 Modularer ACS-Controller | C-863 C-885 mit C-863.20C885 C-884 Modularer ACS-Controller | C-863 C-885 mit C-863.20C885 C-884 Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 Modularer ACS-Controller |
|