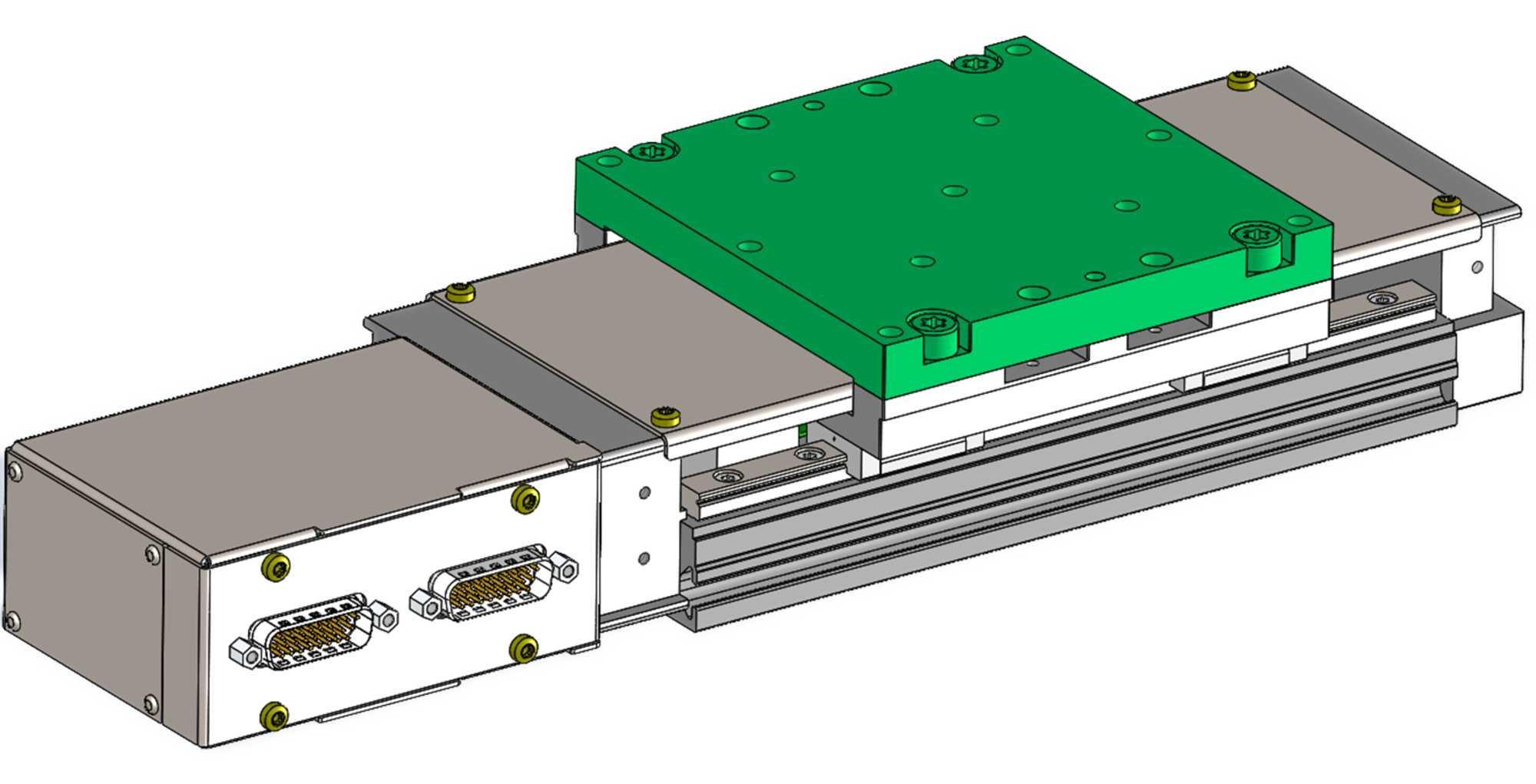
MPL-W10 Modularer konfigurierbarer Präzisionslineartisch
Vielseitig einsetzbar – Spindelantrieb – Kompakter Aufbau
- 50 mm bis 300 mm Stellweg
- Servo- oder Schrittmotor
- Linear- oder Rotationsencoder
- 1 mm, 2 mm oder 5mm Spindelsteigung
- Motorbremse als Option
- Endschalteroptionen
- Kundenschnittstelle als Option
- Schleppkettenoptionen
- Und viele weitere Optionen

Motorausrichtung: gerade
Ausrichtung der Anschlüsse: 0°
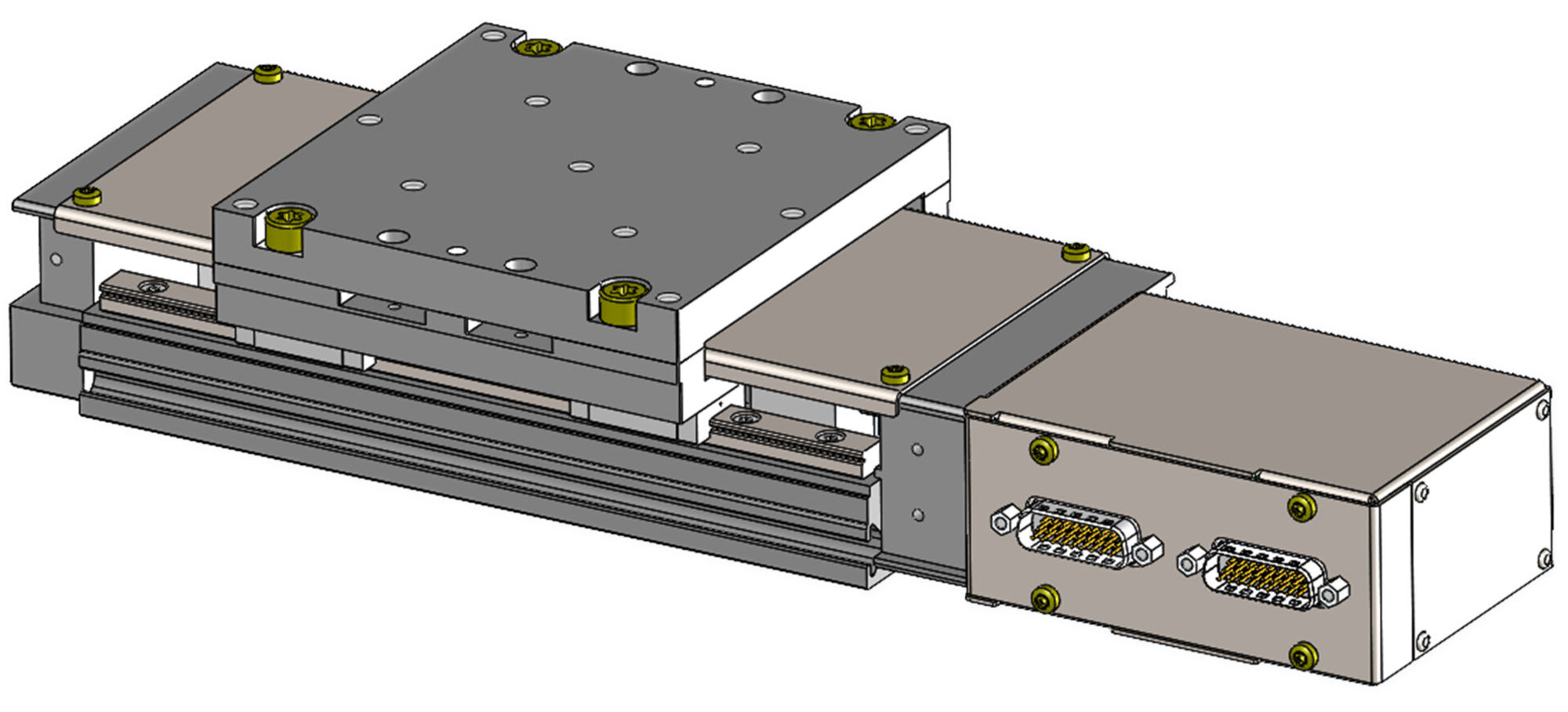
Ausrichtung der Anschlüsse: 180°
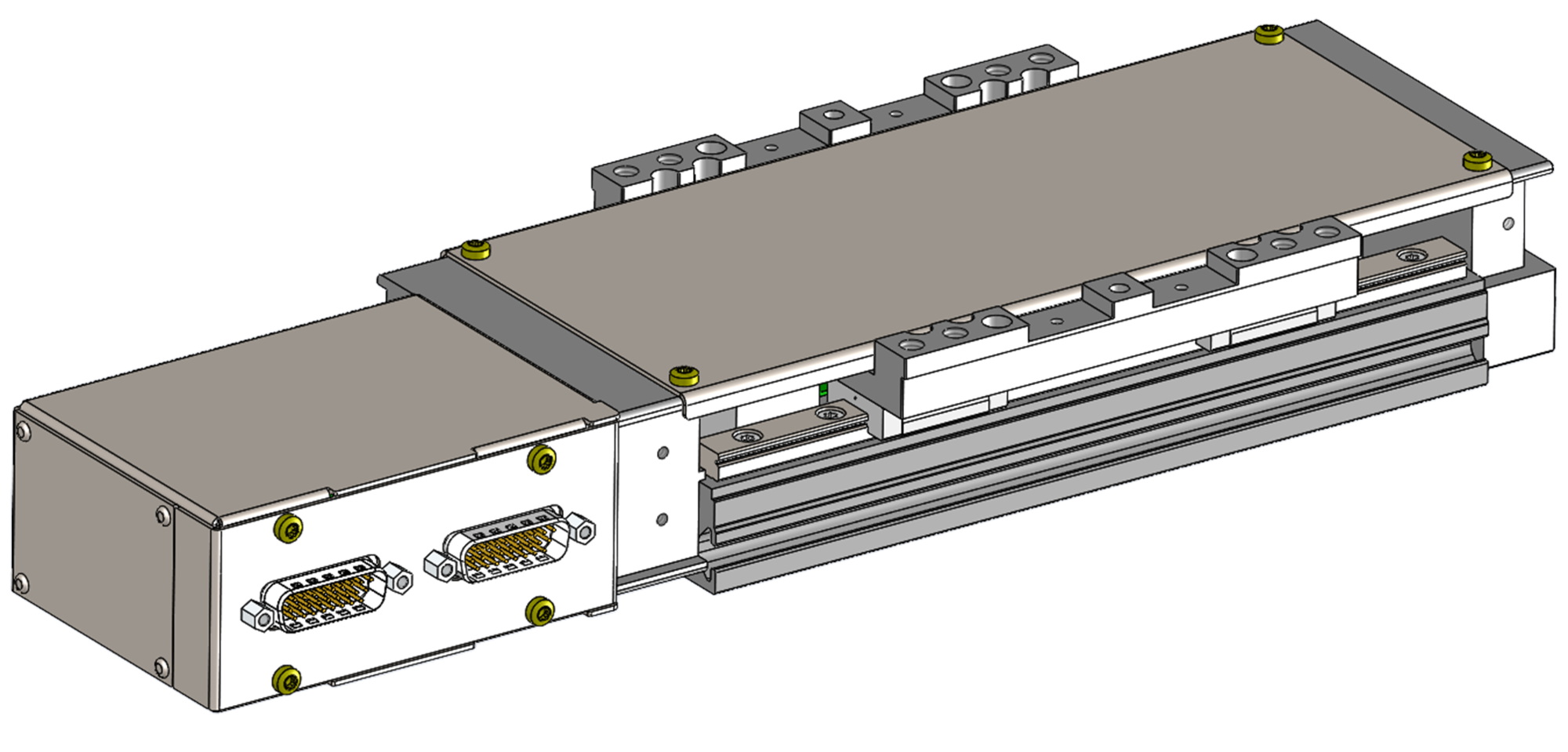
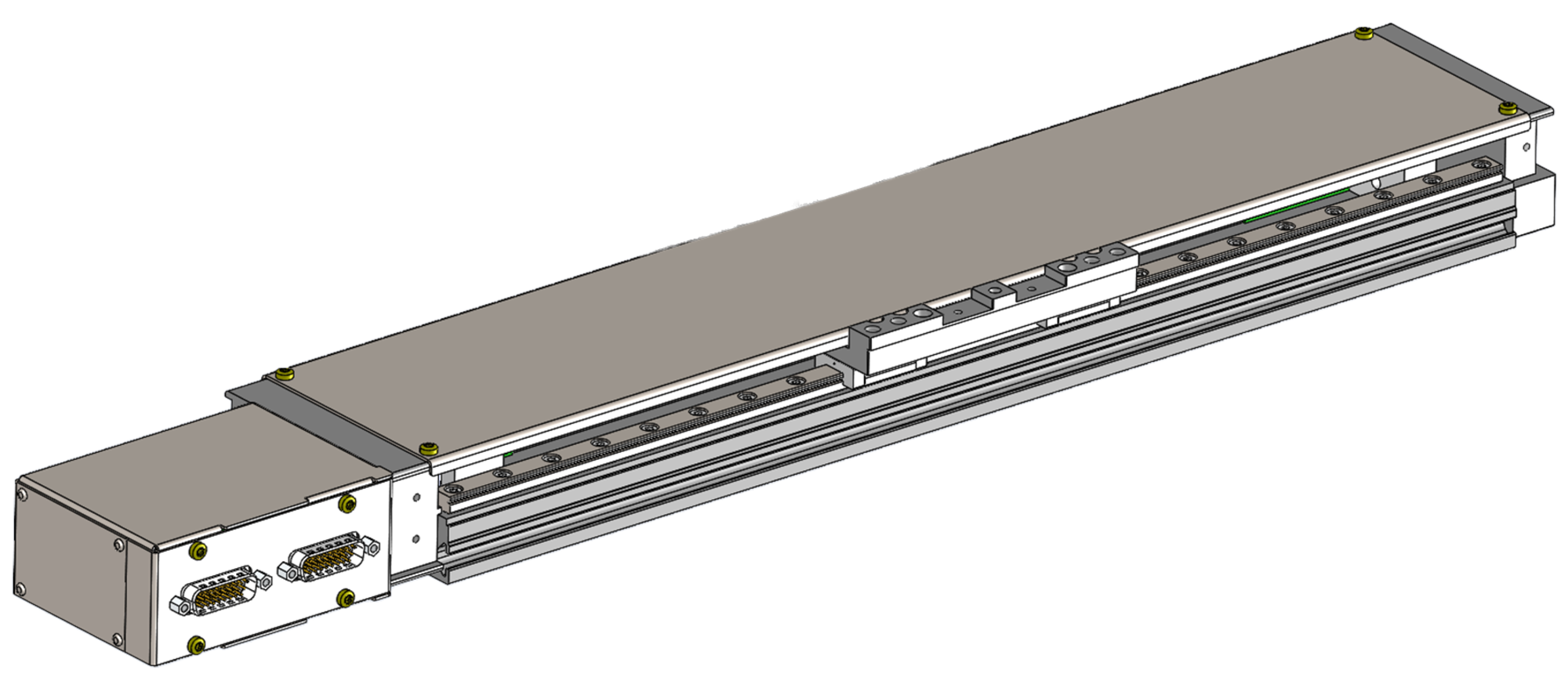
MPL-W10 ohne Kundenschnittstelle
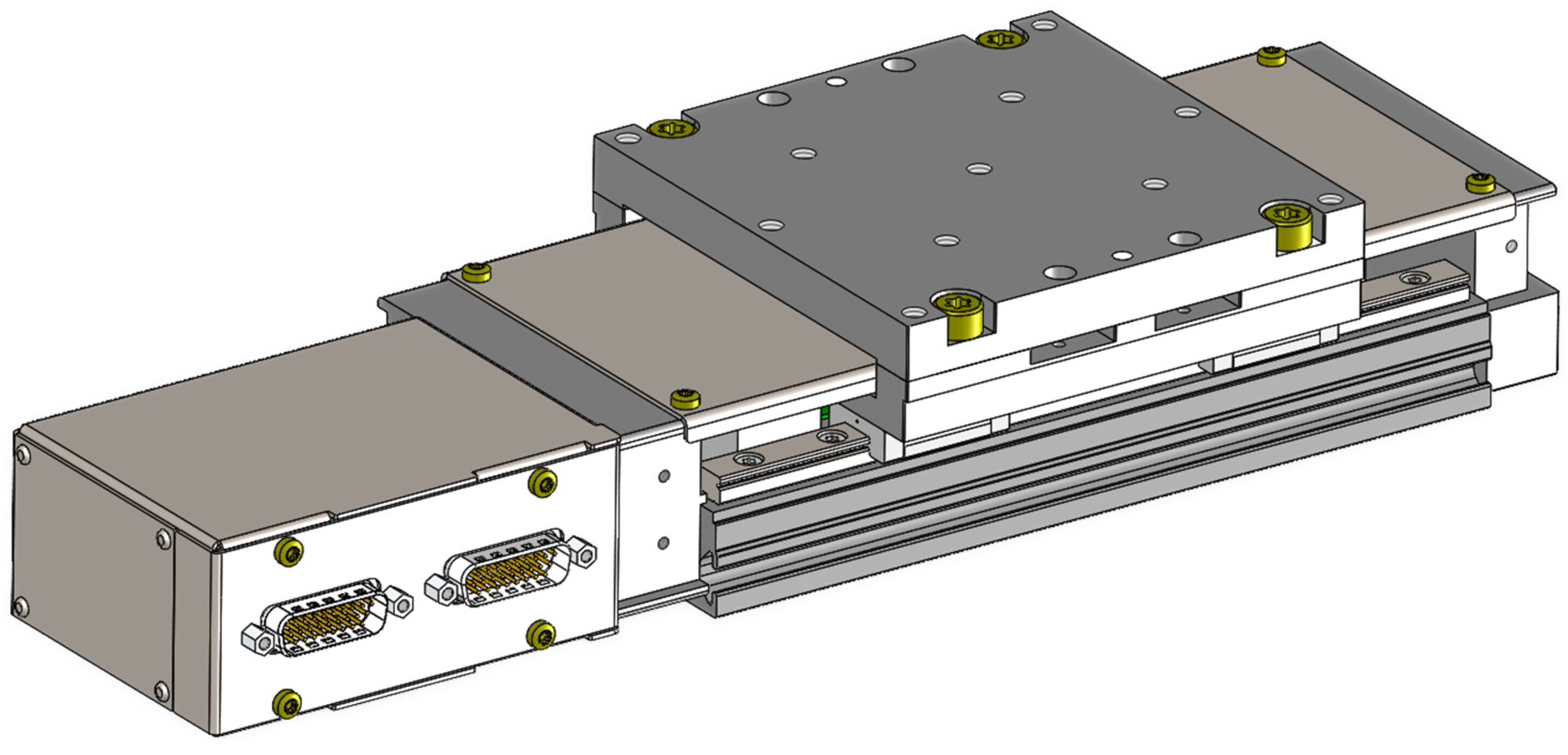
MPL-W10 mit standardmäßiger Kundenschnittstelle
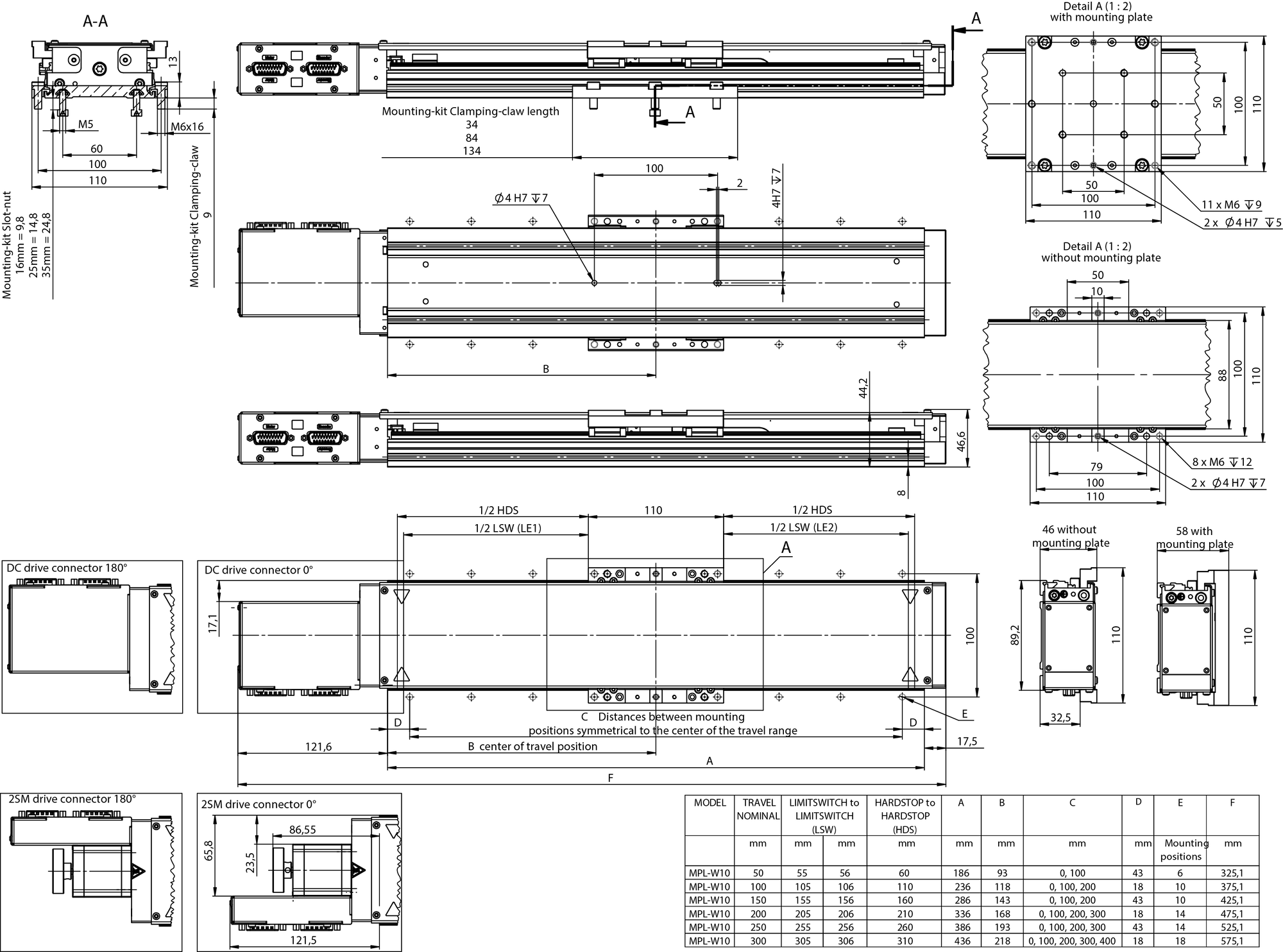
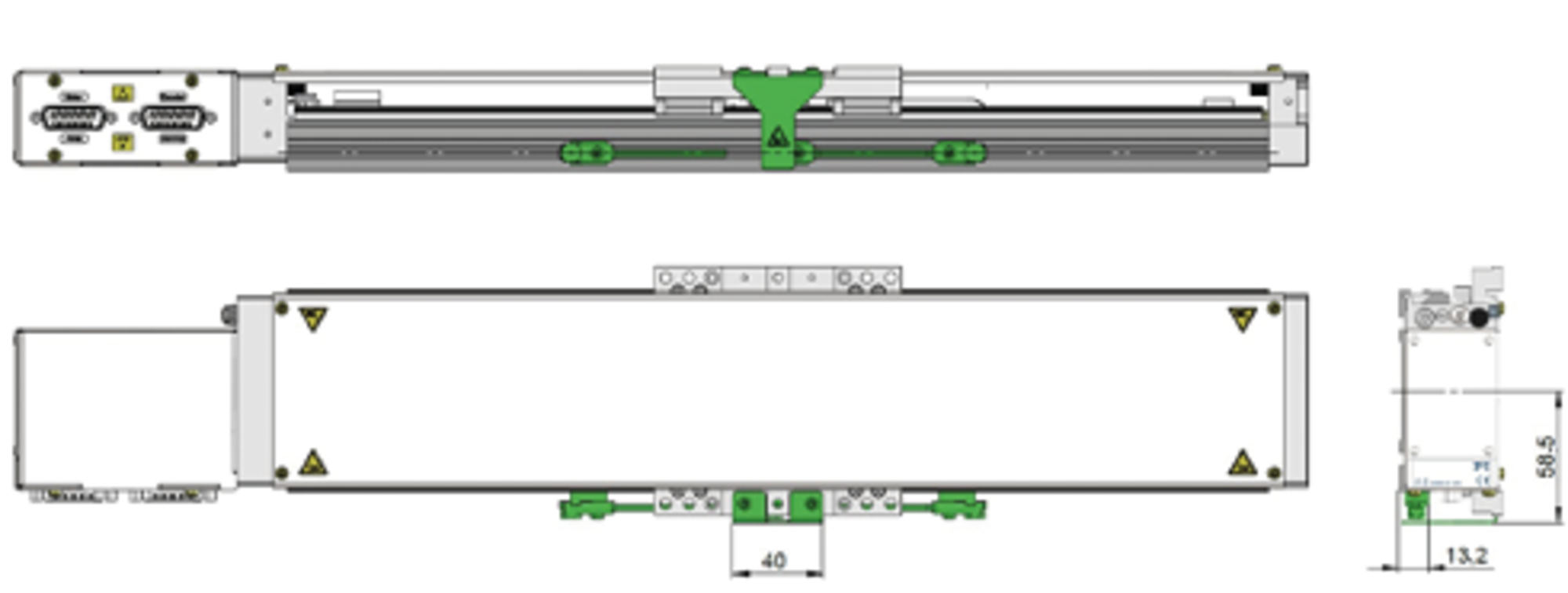
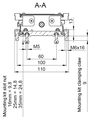
MPL-W10, Abmessungen in mm.
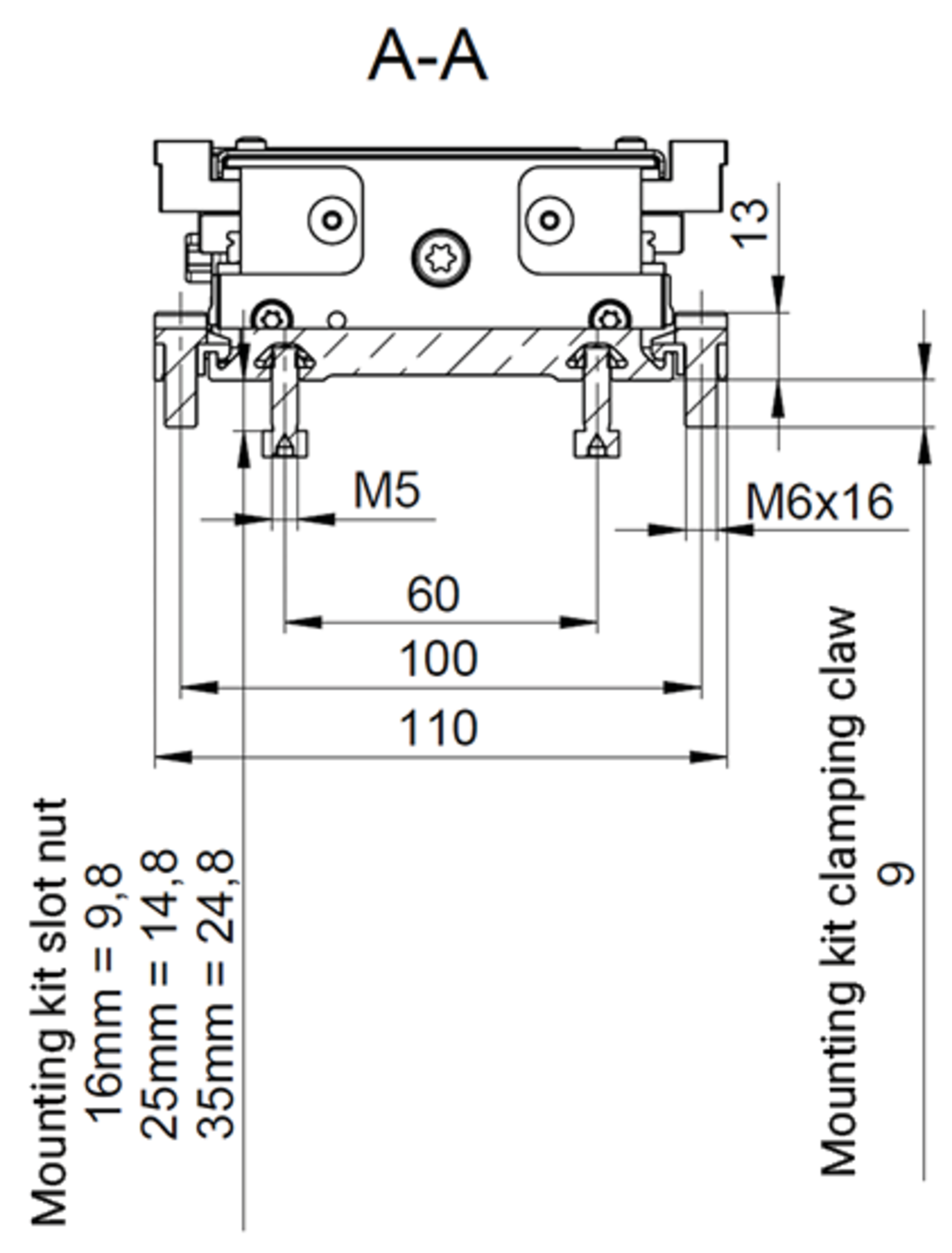
Details: Montage mit Nutensteinen, Montage mit Spannklauen
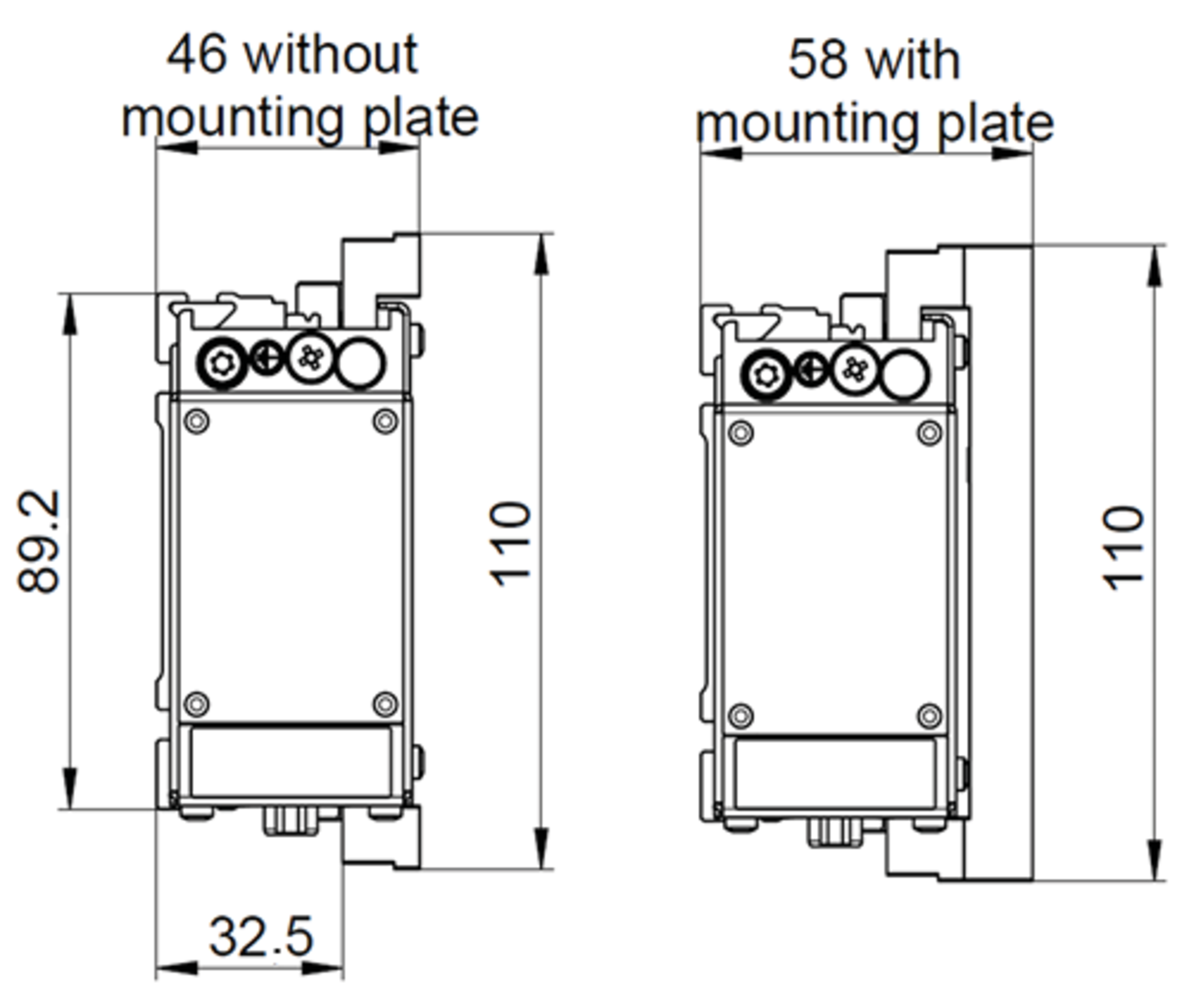
MPL-W10 mit und ohne Kundenschnittstelle (Montageplatte): Seitenansicht
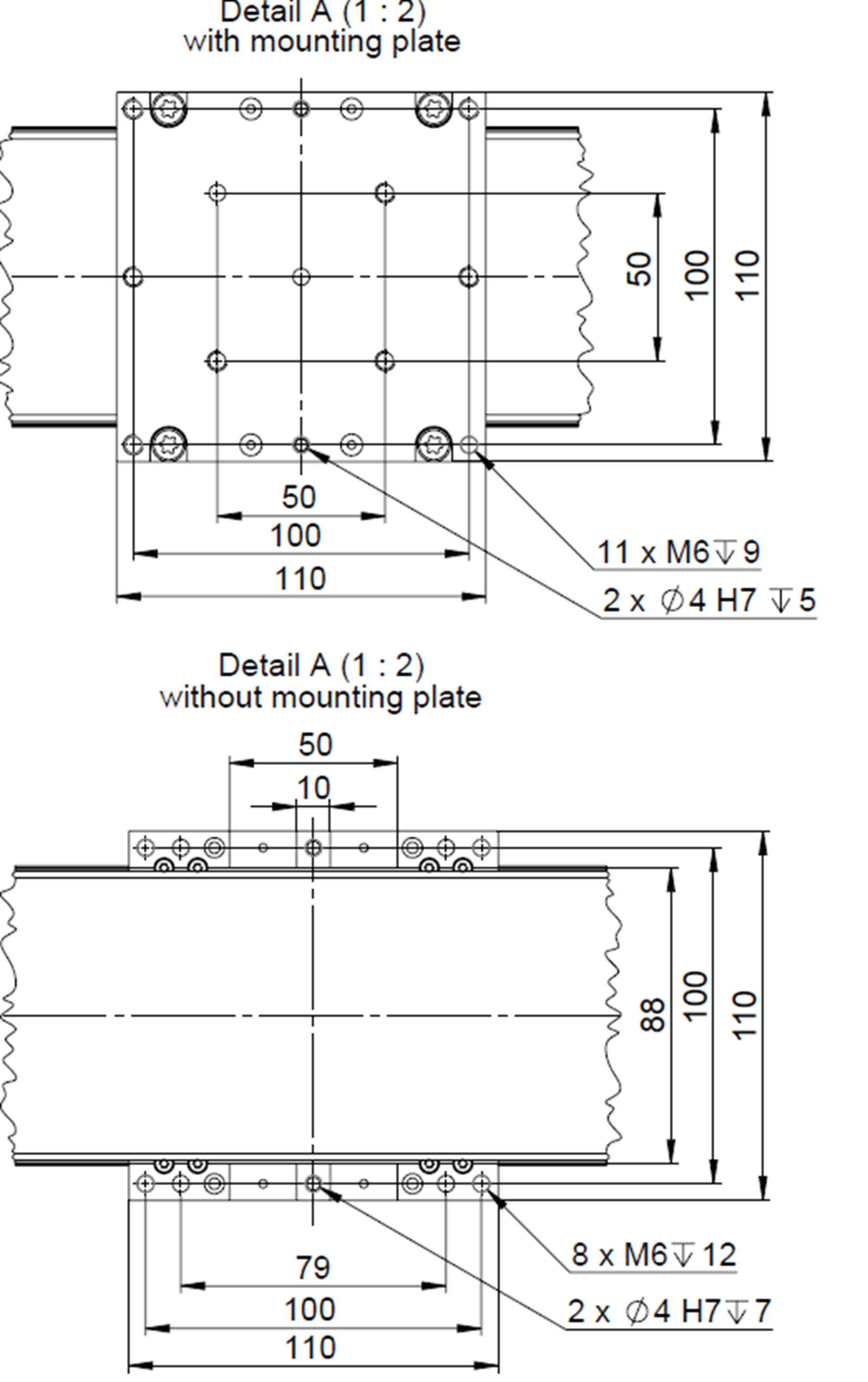
MPL-W10 mit und ohne Kundenschnittstelle (Montageplatte): Ansicht von oben
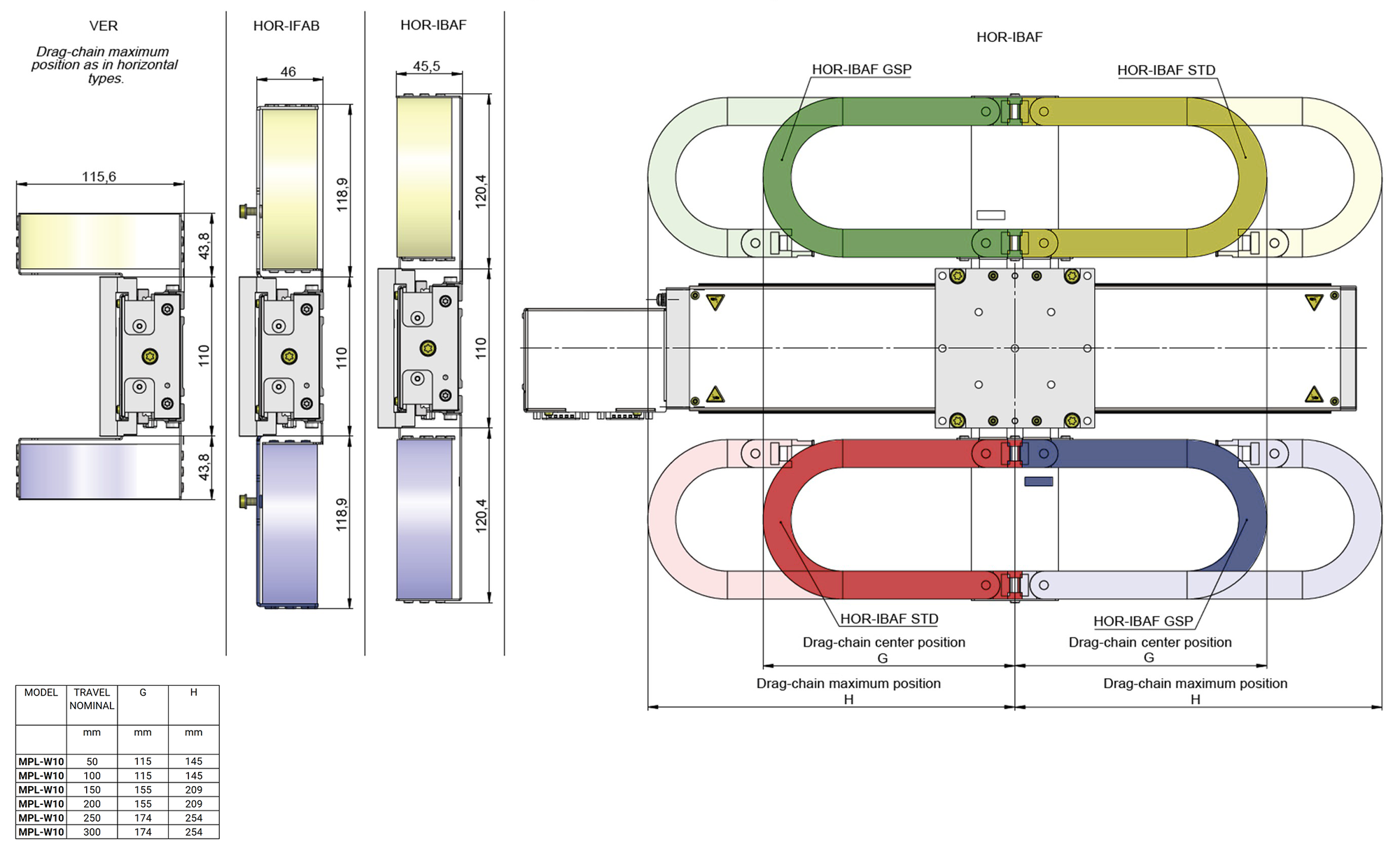
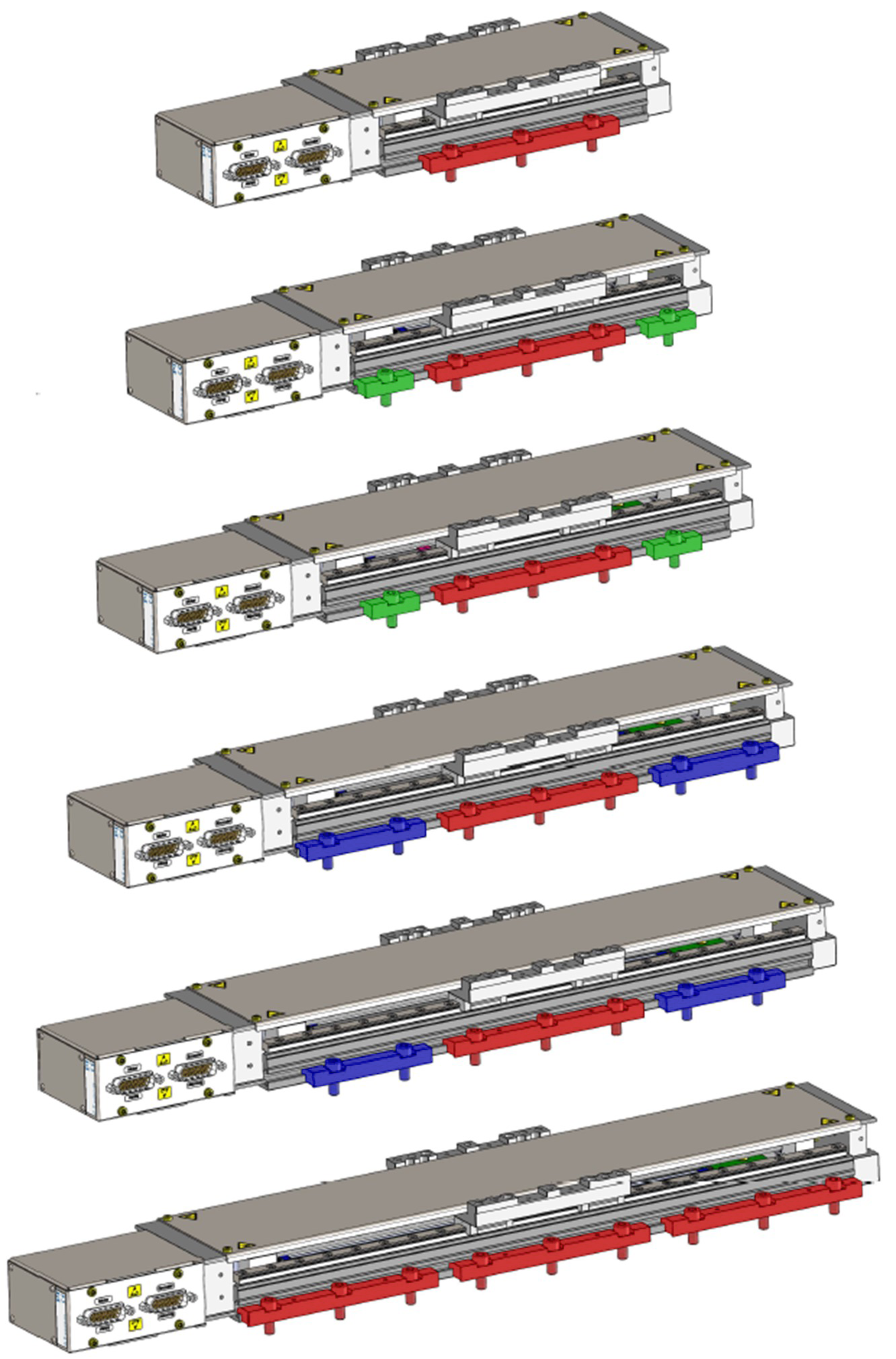
Schleppkette: Montagemöglichkeiten
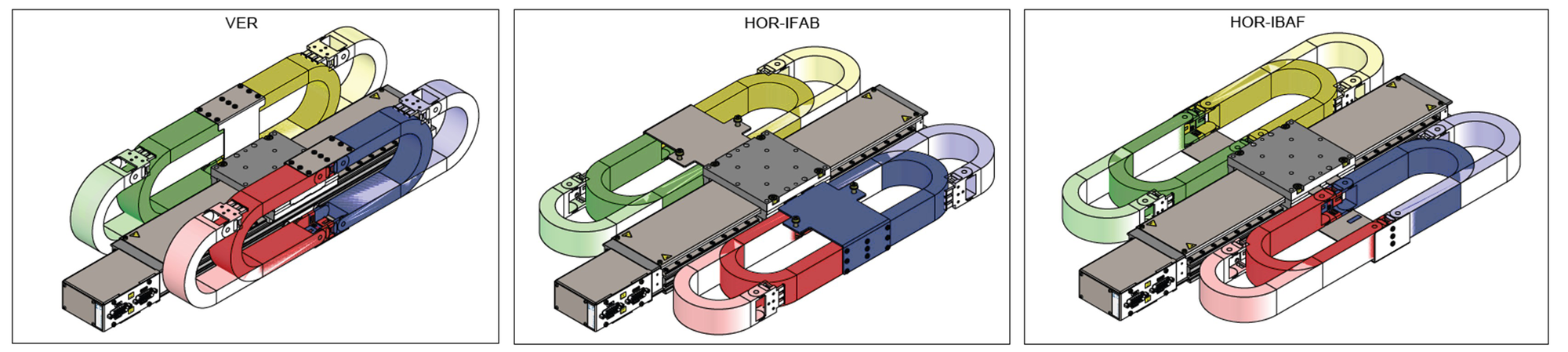
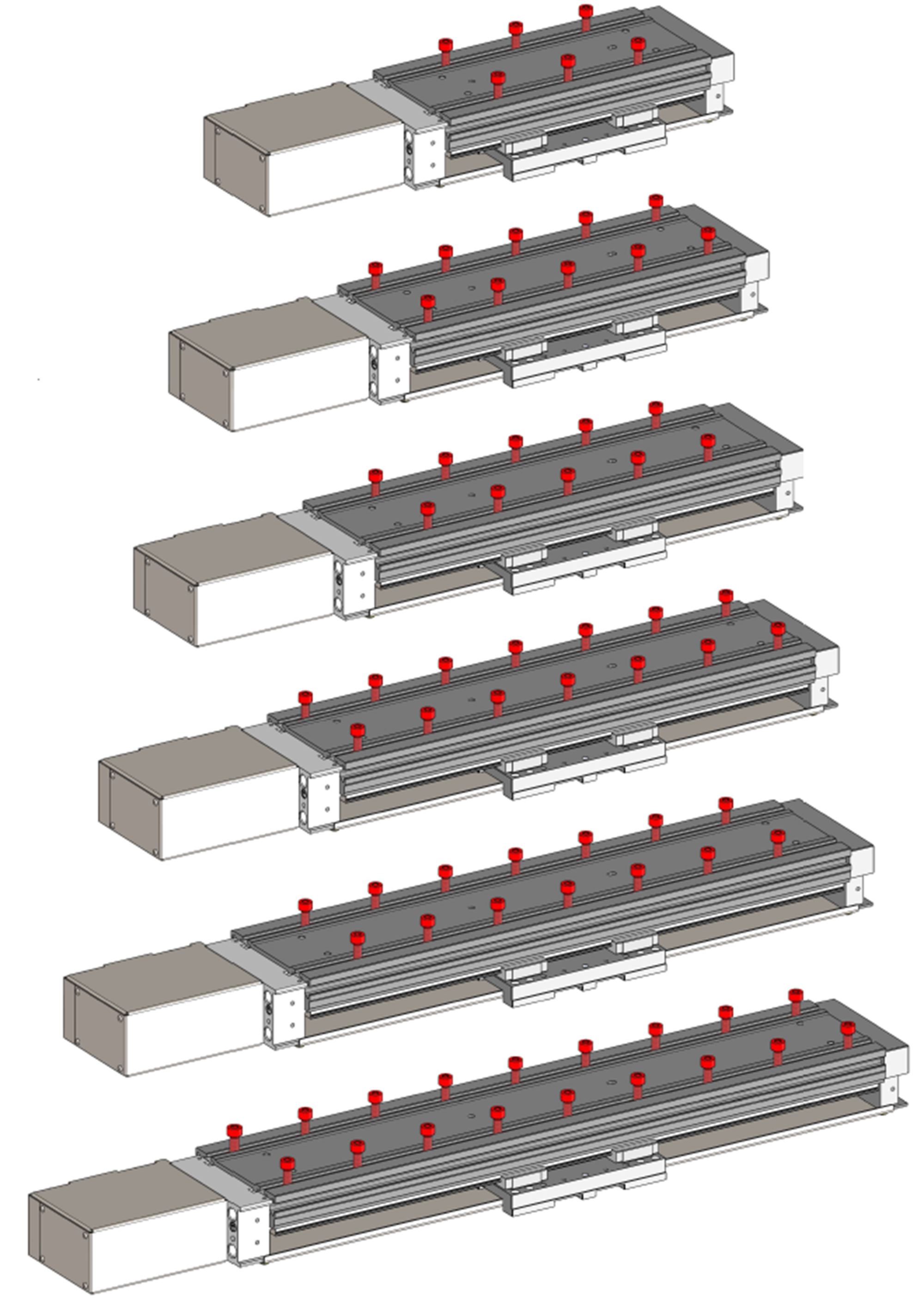
Schleppkette: Montagemöglichkeiten 3D
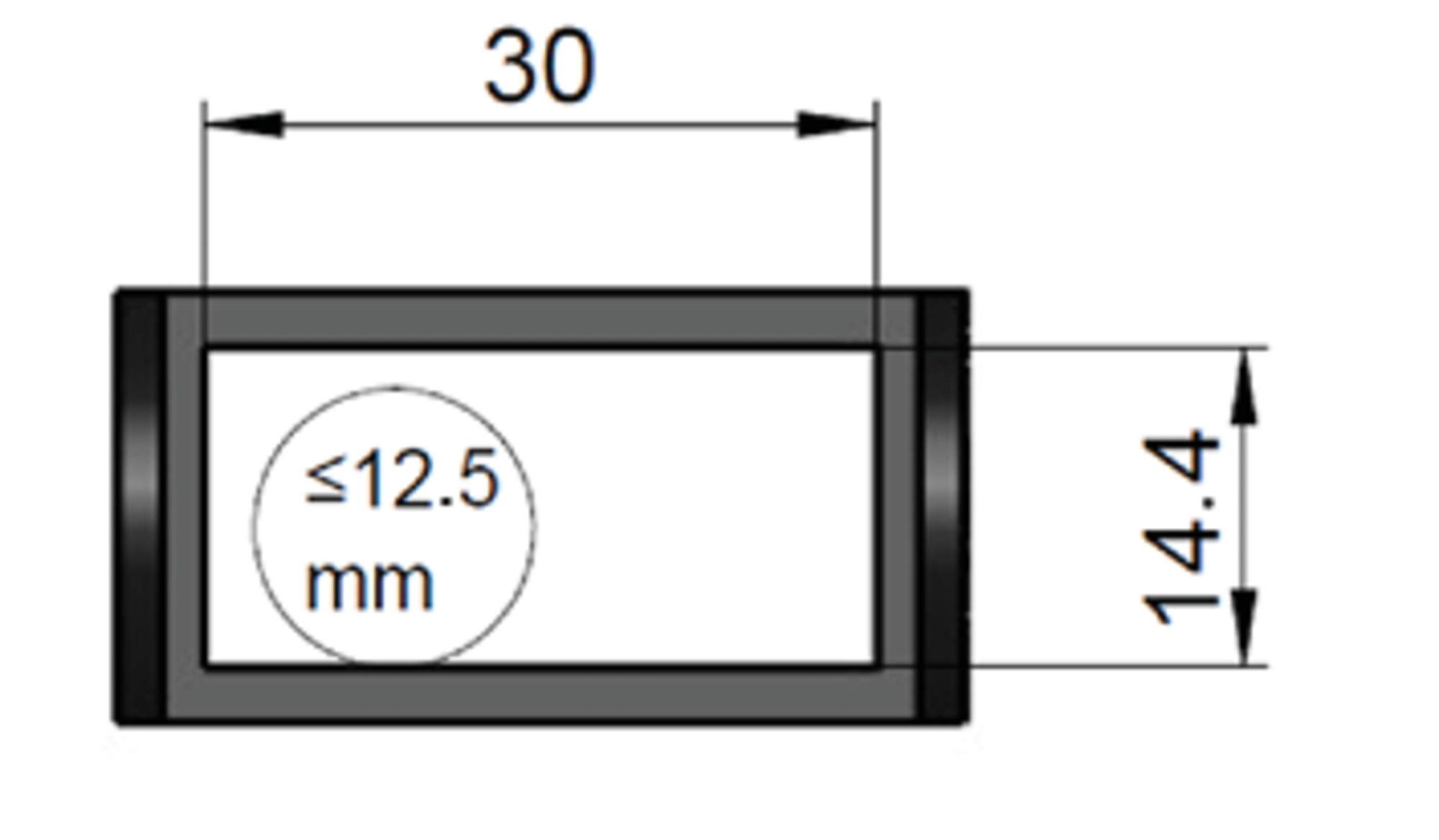
Schleppkette: Innenquerschnitt. Empfohlener maximaler Kabeldurchmesser 12,5 mm. Kabelbiegeradius 45 mm in der Schleppkette.
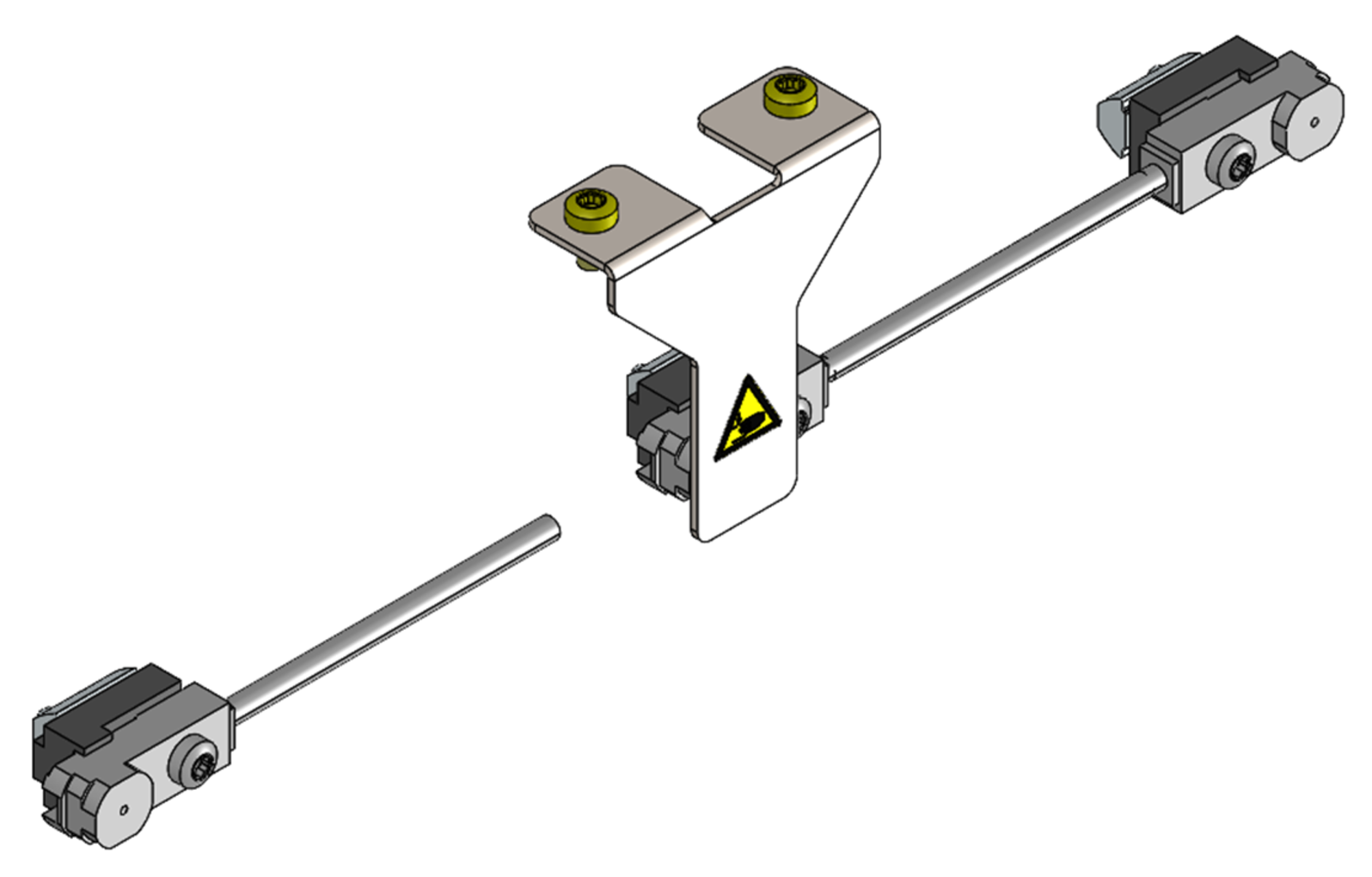
Externer Sensor: Option mit Endschaltern und Referenzschalter
Externer Sensor (grün dargestellt), Abmessungen in mm
Überblick der Spannklauen-Montagesätze

Spannklauen für verschiedene Stellwege
Überblick der Nutenstein-Montagesätze

Nutensteine für verschiedene Stellwege
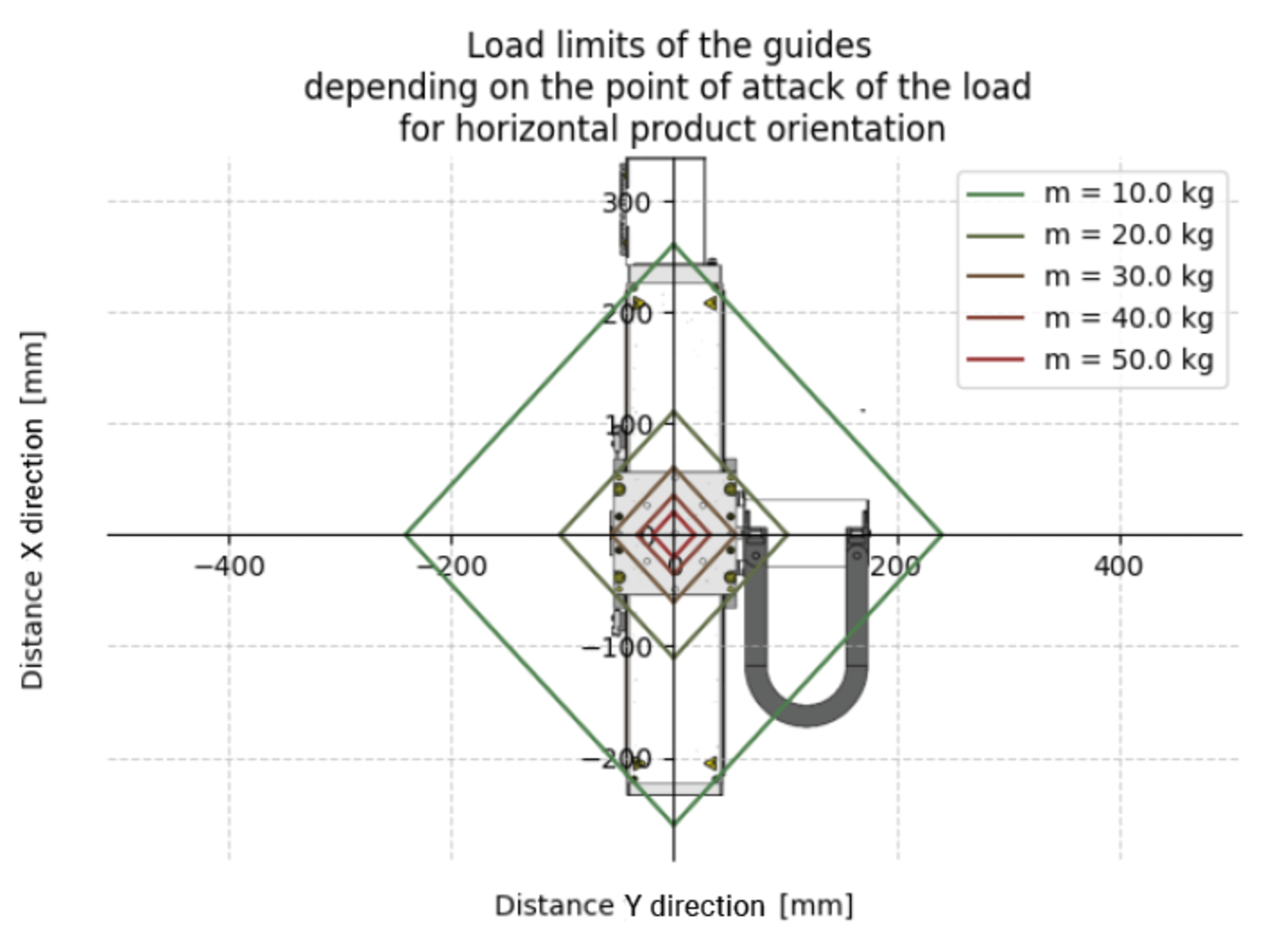
Lastgrenzen der Führungen
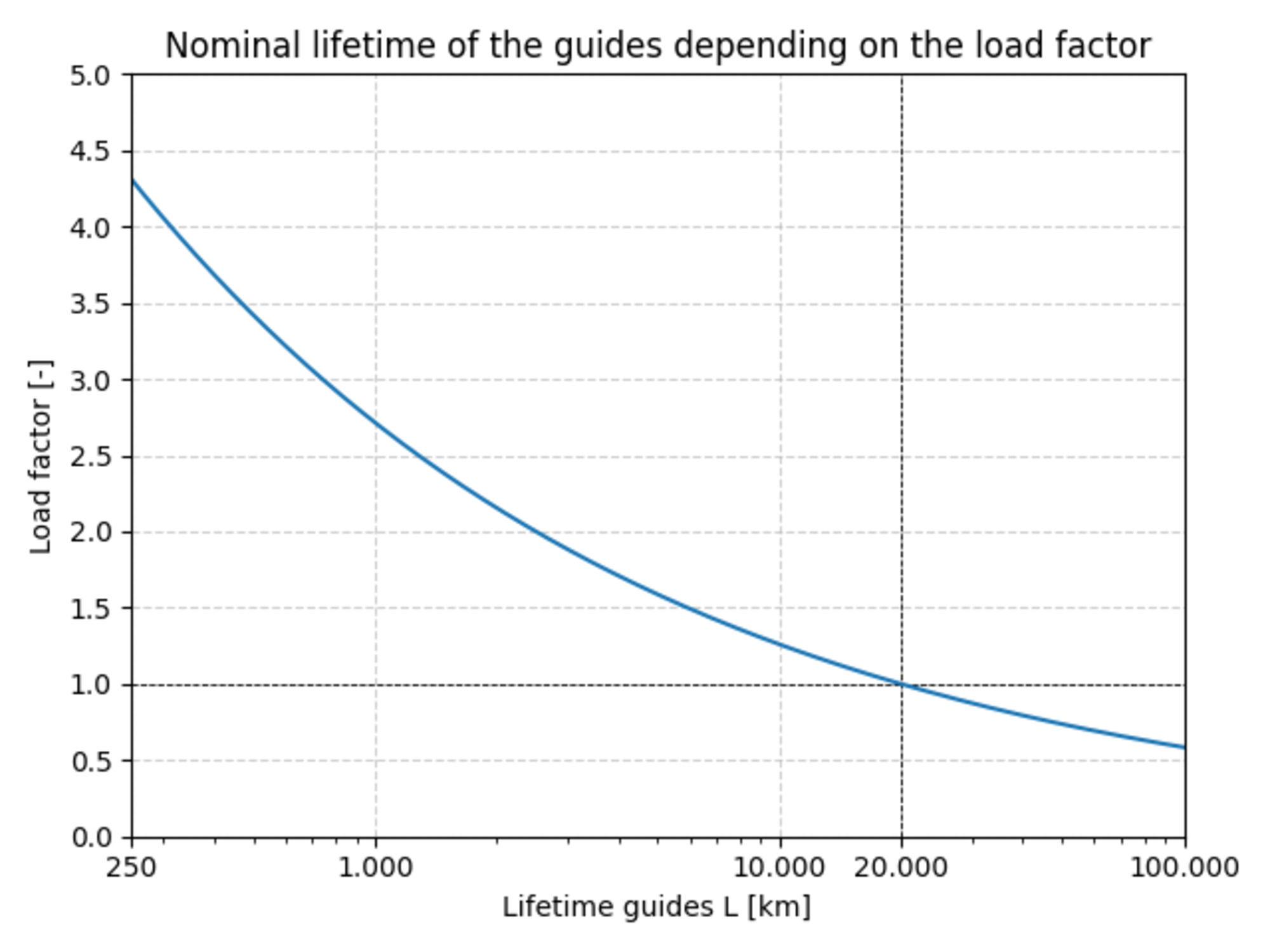
Lebensdauer der Führungen
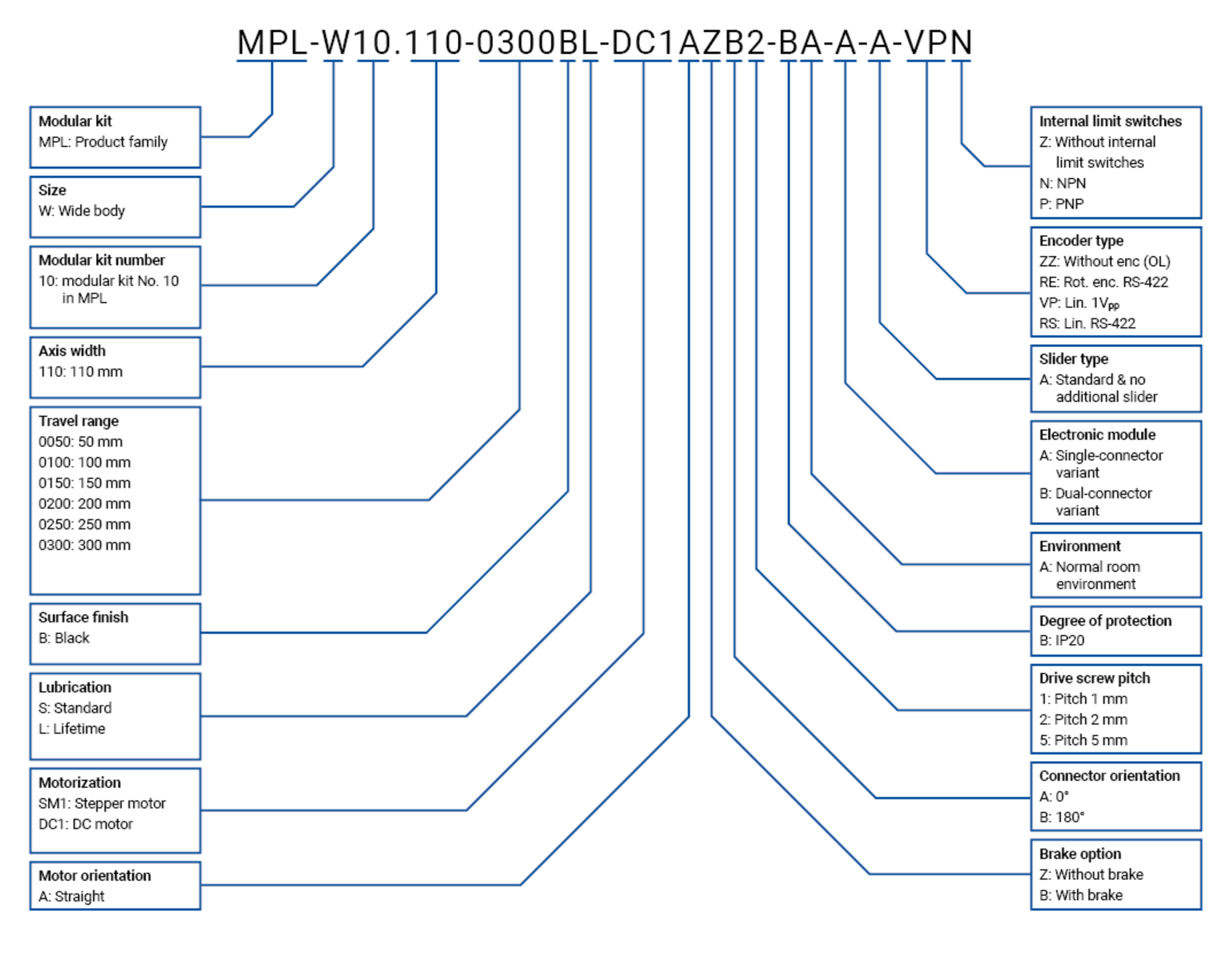
MPL-W10 Produktschlüssel





















Highlights
Entdecken Sie mit dem konfigurierbaren MPL-Lineartisch von PI die Zukunft der Präzisionsbearbeitung. Unsere speziell auf Präzision und Zuverlässigkeit ausgelegte Spindelantriebstechnologie bietet einzigartige Vorteile, die Ihre Anwendung auf ein neues Niveau heben werden.
Maßgeschneiderte Lösung: Optimieren Sie Ihre Prozesse, indem Sie den für Ihre Anwendung am besten geeigneten Lineartisch konfigurieren. Dieser kundenspezifische ausgerichtete Ansatz trägt zu Produktivitätssteigerungen bei, indem er Ihren individuellen betrieblichen Anforderungen gerecht wird und so zu gleichbleibender Qualität und Effizienz beiträgt.
Hervorragende Präzision: Unser Lineartisch wurde für erstklassige Präzision entwickelt und garantiert Genauigkeit in kritischen Positionieranwendungen, z. B. bei XY-Rasterscans in der Waferinspektion. Jedes Teil erfüllt die höchsten Standards, wodurch Fehler reduziert und die Gesamtproduktqualität verbessert werden.
Gleichbleibend hohe Qualität: Die Fertigungsprozesse von PI sind so ausgelegt, dass jedes Produkt ein einheitlich hohes Maß an Präzision und Qualität aufweist. Diese Einheitlichkeit ist entscheidend für die Aufrechterhaltung einer konsistenten Leistung und Zuverlässigkeit in Ihrer Anwendung. Durch sie wird sichergestellt, dass Abweichungen auf ein Minimum reduziert werden und jedes Produkt strenge Standards erfüllt.
Zukunftssichere kundenspezifische Lösungen: Die individuelle Anpassungsfähigkeit unseres modularen Baukastens sorgt für Flexibilität und Effizienz – unabhängig davon, wie sich Ihre Anforderungen entwickeln. Investieren Sie noch heute in die Technologie von morgen.
Setzen Sie auf Präzision, Zuverlässigkeit und flexible Konfigurierbarkeit – entscheiden Sie sich für MPL-Lineartische mit Spindelantrieb für anspruchsvollste Anwendungen. Die spindelgetriebene MPL-Linearachse ist die perfekte Lösung für Anwendungen, die höchste Präzision und Stabilität erfordern. Sie ermöglicht eine exakte vertikale Ausrichtung von Kamera oder Objektiv und bietet optimale Fokussierungsmöglichkeiten in optischen Inspektionssystemen und vergleichbaren Anwendungen.
Dank der mechanischen Selbsthemmung dieser Kombination aus Spindel und Schrittmotor bleibt die Achse auch bei einem Stromausfall sicher in Position. Das bedeutet: kein unkontrolliertes Absenken bei Stromausfall, kein zusätzlicher Haltestrom, keine Bremsen erforderlich.
Stellen Sie die Weichen in Richtung technologischer Fortschritt und sichern Sie sich Ihre führende Position auf dem Markt. Kontaktieren Sie uns (info@pi.de) für eine persönliche Beratung zu einer Lösung, die genau auf Ihre spezifischen Anforderungen zugeschnitten ist.
Die einzelnen MPL-Module werden im Folgenden genauer erläutert.
Stellweg
Der Stellweg gibt die maximal mögliche Bewegung in Bewegungsrichtung an. Folgende Optionen sind verfügbar:
50 mm
100 mm
150 mm
200 mm
250 mm
300 mm
Motor
DC-Motor
Bevorzugt für dynamische Anwendungen
Bevorzugt, wenn eine gleichmäßige Leistung erforderlich ist
Schrittmotor
Präzise Positionierung und Wiederholgenauigkeit
Hervorragendes Drehmoment bei niedriger Drehzahl; bevorzugt, wenn ein starkes Anlaufdrehmoment erforderlich ist
20 mNm Haltemoment zur Aufrechterhaltung einer Position bei Unterbrechung der Stromversorgung
Motorbremse
Für den DC-Motor ist optional eine Motorbremse erhältlich, die dazu dient, Positionen zu halten – auch im stromlosen Zustand.
Dies ist besonders empfehlenswert, wenn der Tisch als Z-Achse (Bewegung in Richtung der Schwerkraft) verwendet wird, um ungewollte Positionsänderungen bei Stromausfall zu verhindern.
Motorausrichtung
Gerade
Schmaler, daher empfohlen, wenn der Einbauraum in der Breite begrenzt ist
Kostengünstiger
Ausrichtung Anschlüsse
Ändern Sie die Ausrichtung des Motormoduls, um die Ausrichtung der Anschlüsse zu ändern und die Kabel optimal zu verlegen:
0°
180°
Spindelsteigung
Die Spindelsteigung gibt an, welchen Weg die Spindelmutter pro Umdrehung der Spindel in Millimetern zurücklegt.
Spindelsteigungen von 1 mm, 2 mm und 5 mm sind verfügbar.
Je größer die Spindelsteigung, desto höher die Geschwindigkeit
Je kleiner die Spindelsteigung, desto größer die Antriebskraft
Je kleiner die Spindelsteigung, desto höher die Positioniergenauigkeit
Encoder
Ein Encoder ermöglicht die Positionierung des Schlittens in einem geschlossenen Regelkreis und dadurch eine präzisere Positionsregelung.
Kein Encoder
Ungeregelter Betrieb, nur für Schrittmotor
Keine zusätzlichen Kosten für den Encoder
Linearencoder 1 Vpp
Höchste Auflösung für präziseste Anwendungen
Berücksichtigt alle Elastizitäten im Antriebsstrang
Linearencoder RS-422
Robuster als Linearencoder 1 Vpp
Berücksichtigt alle Elastizitäten im Antriebsstrang
Rotationsencoder RS-422
Robustester Encoder
Kostengünstigster Encoder
An der Motorwelle
Endschalter
Um mechanisches Durchfahren und damit Beschädigungen des Tisches zu verhindern, wird die Verwendung von Endschaltern empfohlen.
Externe Endschalter
Externe Endschalter lassen sich leichter an die Grenzen der Anwendung anpassen
Sicherer als Grenzwerte in der Software, um die Anwendung zu schützen
Interne Endschalter
Einfache Einrichtung mit sicherem Stopp am Ende des Stellwegs
Interne Endschalter bieten mehr Sicherheit, da sie nicht verschoben werden können
Gewünschte Logik (NPN oder PNP) auswählbar (5 V bis 24 V)
Kundenschnittstelle
Keine Kundenschnittstelle
Geringere Höhe in einem XY-Aufbau
Aufbau kann direkt auf dem Schlitten montiert werden
Standardmäßige Kundenschnittstelle
Mit den gängigsten Bohrrastern verfügbar,
z. B. M6 50 mm × 50 mm and 100 mm × 100 mm
Schleppkette (optional)
Die Schleppkette kann optional ausgewählt werden.
Um den sicheren Betrieb eines XY-Systems zu gewährleisten, das aus zwei MPL-Tischen besteht, wird insbesondere bei dynamischen Anwendungen eine Schleppkette für den oberen Tisch empfohlen.
Die Schleppkette kann an acht verschiedenen Positionen am Tisch befestigt werden. Dabei handelt es sich um vier vertikale und vier horizontale Positionen. Für die horizontalen Positionen sind die folgenden zusätzlichen Varianten verfügbar: HOR-IFAB, wobei der innere Teil der Schleppkette feststehend ist und sich der äußere Teil bewegt, und HOR-IBAF, wobei sich der innere Teil bewegt und der äußere Teil feststehend ist. Die Schleppkette ist ein Zubehörteil, das vom Kunden angebracht werden kann. Die Schleppkette kann entweder an den seitlichen Nuten oder an den Spannklauen befestigt werden.
Bei Bedarf können auch zwei Schleppketten an gegenüberliegenden Seiten angebracht werden.
Schmierung
Lebensdauerschmierung
Kein Nachschmieren notwendig
Beste Wahl für moderate Belastung/Dynamik
Standardschmierung
Für hohe Belastungen sowie dynamischen oder Dauerbetrieb
Je nach Anwendung muss alle 4 bis 6 Monate oder nach einer maximalen Strecke von 300 km nachgeschmiert werden
Oberflächenbeschaffenheit
Schwarz eloxierte Aluminumteile:
Korrosionsschutz
Die Eloxalschicht macht das Material weniger empfindlich gegenüber Abrieb und Kratzern
Optisch ansprechend
Schutzart
IP2x:
Kostengünstig
Das Produkt bietet ausreichenden Schutz gegen das Eindringen fester Gegenstände mit einem Durchmesser von über 12,5 mm (z. B. Finger).
Montagesatz
Satz 1: Spannklaue
Der Montagesatz mit Spannklaue ist für alle Konfigurationsvarianten des Tisches geeignet. Er dient zur Befestigung der Achse in der Anwendungsumgebung. Die Spannklauen werden in die seitliche Nut eingeführt und mit Schrauben an der Oberfläche befestigt. Zum Lieferumfang der Spannklauen gehören Schrauben in unterschiedlichen Längen.
Satz 2: Nutenstein
Der Montagesatz mit Nutenstein ist für alle Konfigurationsvarianten des Tisches geeignet. Er dient zur Befestigung der Achse in der Anwendungsumgebung. Die Nutensteine werden in den Nuten an der Unterseite des Tisches eingeführt und durch eine Durchgangsbohrung mit der Oberfläche verschraubt. Im Lieferumfang des Montagesatzes sind Schrauben in verschiedenen Längen enthalten.
Spezifikationen
Spezifikationen
| Antriebsart | DC-Motor | Schrittmotor | |||||||
| Spindelsteigung [mm] | 1 | 2 | 5 | 1 | 2 | 5 | |||
| Maximale Geschwindigkeit in X, v unbelastet [mm/s] | 50 | 100 | 250 | 20 | 40 | 100 | |||
| Beschleunigung a [m/s2] | 0,9 | 1,7 | 3,5 | 0,7 | 1,4 | 3,2 | |||
| Kleinste Schrittweite in X (max.) [μm] | Encoder | 1 Vpp | 0,05 | 0,1 | 0,2 | 0,05 | 0,1 | 0,2 | |
| RS-422 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | |||
| Rot. | 2 | 5 | 10 | – | – | – | |||
| Ohne | – | – | – | 2 | 5 | 10 | |||
| Unidirektionale Wiederholgenauigkeit in X (max.) [μm] | Encoder | 1 Vpp | ±0,5 | ±0,5 | ±1 | ±0,5 | ±0,5 | ±1 | |
| RS-422 | ±0,5 | ±0,5 | ±1 | ±0,5 | ±0,5 | ±1 | |||
| Rot. | ±2 | ±2 | ±5 | – | – | – | |||
| Ohne | – | – | – | ±5 | ±5 | ±10 | |||
| Bidirektionale Wiederholgenauigkeit in X (max.) [μm] | Encoder | 1 Vpp | 1 | 1 | 2 | 1 | 1 | 2 | |
| RS-422 | 1 | 1 | 2 | 1 | 1 | 2 | |||
| Rot. | 5 | 5 | 10 | – | – | – | |||
| Ohne | – | – | – | 10 | 10 | 20 | |||
| Antriebsart | DC-Motor | Schrittmotor | |||||||
| Spindelsteigung [mm] | 1 | 2 | 5 | 1 | 2 | 5 | |||
| Antriebskraft in Bewegungsrichtung in X [N] | 100 | 50 | 20 | 100 | 100 | 40 | |||
| Haltekraft in X, passiv [N] | – | – | – | 50 | 40 | 20 | |||
| Zulässige Kraft in Z [N] | 100* | 100* | 100* | 100* | 100* | 100* | |||
| Zulässige Kraft in Y [N] | 100 | 100 | 100 | 100 | 100 | 100 | |||
| Zulässige Kraft in X [N] | 100 | 50 | 20 | 100 | 100 | 40 | |||
| Zulässiges Drehmoment in θX [Nm] | 30 | 30 | 30 | 30 | 30 | 30 | |||
| Zulässiges Drehmoment in θY [Nm] | 20 | 20 | 20 | 20 | 20 | 20 | |||
| Zulässiges Drehmoment in θZ [Nm] | 20 | 20 | 20 | 20 | 20 | 20 | |||
| Haltebremse | Optional für DC-Motor – Haltekraft 50 N | ||||||||
| Antriebsspindeltyp | Kugelumlaufspindel | ||||||||
| Führung | Lineare Kugelumlaufführung | ||||||||
| Bewegte Masse [g] | Abhängig von der Konfiguration | ||||||||
| *Der angegebene Wert entspricht der Nennlast. Eine Erhöhung der Nutzlast verringert die nominelle Lebensdauer (siehe Diagramm zur nominellen Lebensdauer von Führungen). | |||||||||
| Stellweg in X [mm] | 50 | 100 | 150 | 200 | 250 | 300 | |||
| Ebenheit (Geradheitsabweichung in Z bei Bewegung in X) [μm] | 5 | 7 | 9 | 10 | 11 | 12 | |||
| Geradheit (Geradheitsabweichung in Z bei Bewegung in X) [μm] | 5 | 7 | 9 | 10 | 11 | 12 | |||
| Gieren (Winkelabweichung in θZ bei Bewegung in X) [μrad] | 100 | 150 | 175 | 200 | 225 | 250 | |||
| Neigen (Winkelabweichung in θY bei Bewegung in X) [μrad] | 100 | 150 | 175 | 200 | 225 | 250 | |||
| Integrierter Sensor | Linearencoder | Linearencoder | Rotationsencoder | Ungeregelter Betrieb | |||||
| Sensorsignal | 1 Vpp | RS-422 | RS-422 | Ohne | |||||
| Sensorauflösung | Abhängig von Controllereinstellung | 80 nm | 1024 Impulse pro Umdrehung | – | |||||
| Sensorsignalperiode | 80 µm | 80 µm | 6,136 µrad | – | |||||
| Referenzschalter | Optischer Reflexionssensor | Optischer Reflexionssensor | Indexpuls des magnetischen Encoders | – | |||||
| Wiederholgenauigkeit Referenzschalter | 1 µm | ||||||||
| Interne Endschalter | Hall-Effekt-Schalter | ||||||||
| Wiederholgenauigkeit interne Endschalter | 1 μm | ||||||||
| Externe Endschalter | Induktiver Näherungssensor | ||||||||
| Wiederholgenauigkeit externe Endschalter | 40 μm | ||||||||
| Steifigkeit in X [N/μm] | 5 | ||||||||
| Steifigkeit in Y [N/μm] | 5 | ||||||||
| Steifigkeit in Z [N/μm] | 5 | ||||||||
| Steifigkeit in θX [μrad/Nm] | 20 | ||||||||
| Steifigkeit in θY [μrad/Nm] | 25 | ||||||||
| Steifigkeit in θZ [μrad/Nm] | 20 | ||||||||
| Integrierter Sensor | Linearencoder | Linearencoder | |||||||
| Antriebsart | DC-Motor | Schrittmotor | |||||||
| Nennspannung [V] | 24 | 48 | |||||||
| Spitzenspannung [V] | 48 | 48 | |||||||
| Nennstrom, rms [A] | 1,69 | 1 | |||||||
| Spitzenstrom, rms [A] | 8,18 | – | |||||||
| Motorauflösung [Vollschritte/U] | – | 200 | |||||||
| Drehmomentkonstante [mN·m/A] | 36,9 | – | |||||||
| Widerstand Phase-Phase [Ω] | 2,85 | 5,3 | |||||||
| Induktivität Phase-Phase [mH] | 0,373 | 12,5 | |||||||
| Gegen-EMK, rotatorisch [V/krpm] | 4 | 48 | |||||||
| Polpaarzahl | 1 | – | |||||||
| Motorkonstante, rotatorisch [mN·m/A] | 36,9 | – | |||||||
| Material | Aluminium, Stahl und andere | ||||||||
| Sensoranschluss | HD D-sub 26 (m) | ||||||||
| Motoranschluss | HD D-sub 26 (m) | ||||||||
| Empfohlene Controller/Treiber | C-863 (DC, RS-422), C-663 (2SM, RS-422), modularer ACS-Controller, Beckhoff-Terminals | ||||||||
| Betriebstemperaturbereich | 10 °C bis 50 °C | ||||||||
| Lagertemperatur | 0 °C bis 70 °C | ||||||||
| Transporttemperatur | 0 °C bis 70 °C | ||||||||
| Betriebsdruck | Umgebungsdruck (80 kPa bis 110 kPa) | ||||||||
| Betriebshöhe | bis 2000 m | ||||||||
| Schutzart | IP20 | ||||||||
| Stellweg [mm] | 50 | 100 | 150 | 200 | |||||
| Masse min./max. [kg] | 1,9 - 2,18 | 2,13 - 2,41 | 2,37 - 2,6 | 2,6 - 2,89 | |||||
| Artikel | Modell-Nr. | Typ | NPN-Ausgang | PNP-Ausgang | |||||
| Seitentyp | GX-F8A(I) | GX-F8B(I) | GX-F8A(I)-P | GX-F8A(I)-p | |||||
| Kopftyp | GX-F8A(I) | GX-F8B(I) | GX-F8A(I)-P | GX-F8A(I)-p | |||||
| Maximale Reichweite | 2,5 mm 0,098 in ±8 % | ||||||||
| Stabiler Messbereich | 0 mm bis 2,1 mm 0 bis 0,083 in | ||||||||
| Standardreferenzobjekt | Eisenplatte 15 mm × 15 mm × t 1 mm 0,591 in × 0,591 in × t 0,039 in | ||||||||
| Hysterese | max. 20 % des Betriebsabstands (mit Standardreferenzobjekt) | ||||||||
| Wiederholgenauigkeit | Entlang Messachse, senkrecht zur Messachse: 0,04 mm 0,0016 in oder weniger | ||||||||
| Versorgungsspannung | 12 V DC bis 24 V DC +10 %/-15 % Welligkeit Spitze-Spitze 10 % oder weniger | ||||||||
| Stromaufnahme | 15 mA oder weniger | ||||||||
| Ausgang | NPN-Transistor mit offenem Kollektor
| PNP-Transistor mit offenem Kollektor
| |||||||
| Nutzungskategorie | DC-12 oder DC-13 | ||||||||
| Schaltverhalten des Ausgangs | Normal offen | Normal geschlossen | Normal offen | Normal geschlossen | |||||
Downloads
Datenblatt
Dokumentation
Benutzerhandbuch MPLUM0002
MPL-W10.0000129 Präzisionslineartisch




