L-511.033111
Hochpräziser Lineartisch; DC-Motor; 52 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, Sin/Cos, 1 V Spitze-Spitze















Lineartisch der Referenzklasse
Hohe Ablaufgenauigkeit und Belastbarkeit durch Kugelumlaufführungen. Präzisions-Kugelumlaufspindel mit 2 mm Steigung. Grundprofil aus entspanntem Aluminium für hohe Stabilität. Kontaktlose optische Endschalter. Kontaktloser optischer Referenzschalter mit Richtungserkennung in der Mitte des Stellwegs.
Erhältliche Motortypen
Arten der Positionsmessung
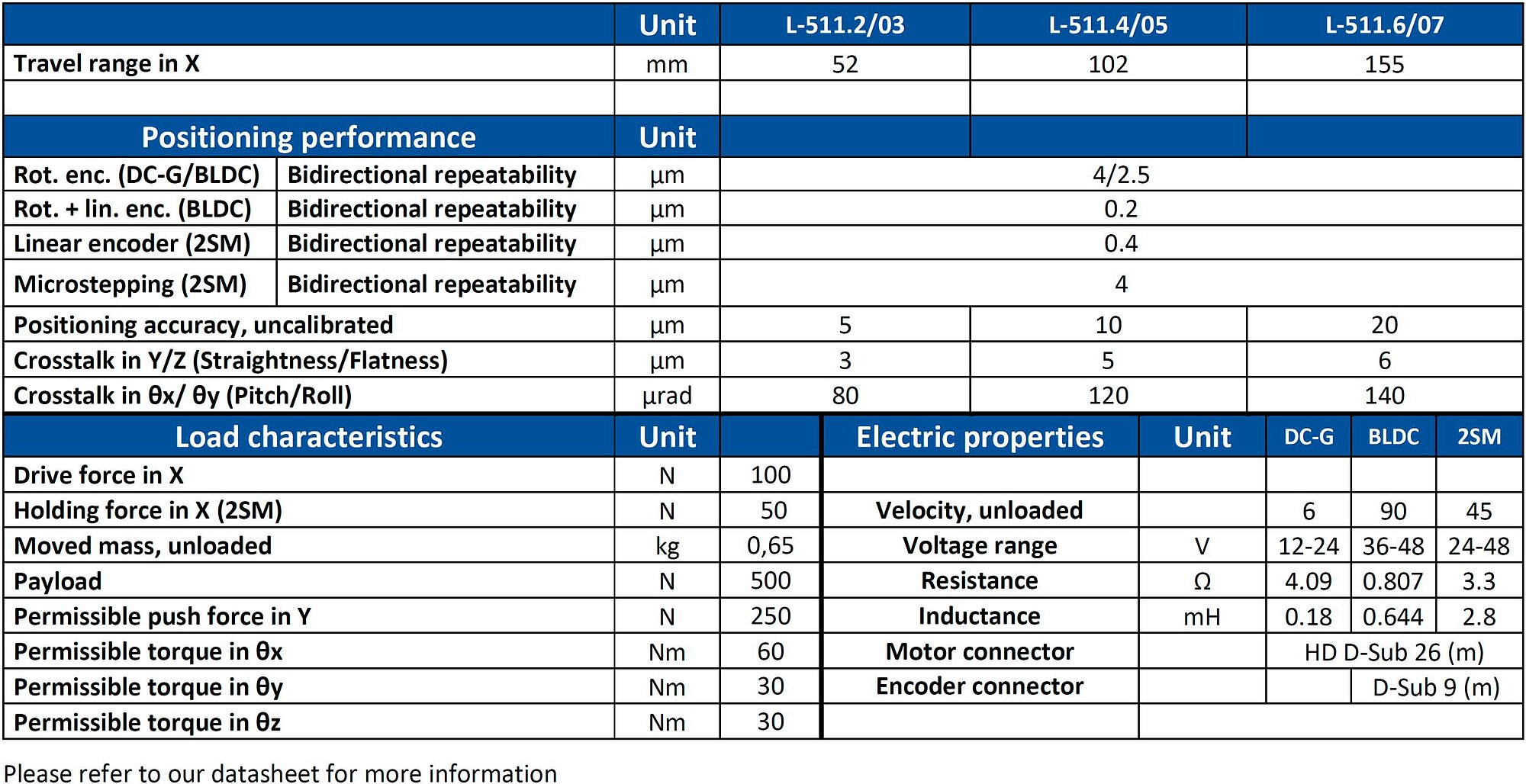
Hochgenaue Positionsmessung mit inkrementellem Linearencoder
Kontaktlose optische Linearencoder messen die Position mit höchster Genauigkeit direkt an der Plattform. Nichtlinearitäten, mechanisches Spiel oder elastische Deformation beeinflussen die Messung nicht.
Einsatzgebiete
Autofokus. Laserschneiden. Forschung. Biotechnologie. Automatisierung. Optische Justage.
| Bewegen | L-511.033111 | L-511.033132 | L-511.035111 | L-511.035132 | L-511.053111 | L-511.053132 | L-511.055111 | L-511.055132 | L-511.073111 | L-511.073132 | L-511.075111 | L-511.075132 | L-511.20AD10 | L-511.20DG10 | L-511.20SD00 | L-511.24AD00 | L-511.2ASD00 | L-511.40AD10 | L-511.40DG10 | L-511.40SD00 | L-511.44AD00 | L-511.4ASD00 | L-511.60AD10 | L-511.60DG10 | L-511.60SD00 | L-511.64AD00 | L-511.6ASD00 | Toleranz |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Aktive Achsen | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | |
| Stellweg in X | 52 mm | 52 mm | 52 mm | 52 mm | 102 mm | 102 mm | 102 mm | 102 mm | 155 mm | 155 mm | 155 mm | 155 mm | 52 mm | 52 mm | 52 mm | 52 mm | 52 mm | 102 mm | 102 mm | 102 mm | 102 mm | 102 mm | 155 mm | 155 mm | 155 mm | 155 mm | 155 mm | |
| Maximale Geschwindigkeit in X, unbelastet | 90 mm/s | 90 mm/s | 90 mm/s | 90 mm/s | 90 mm/s | 90 mm/s | 90 mm/s | 90 mm/s | 90 mm/s | 90 mm/s | 90 mm/s | 90 mm/s | 90 mm/s | 6 mm/s | 45 mm/s | 90 mm/s | 45 mm/s | 90 mm/s | 6 mm/s | 45 mm/s | 90 mm/s | 45 mm/s | 90 mm/s | 6 mm/s | 45 mm/s | 90 mm/s | 45 mm/s | |
| Geradheit (Lineares Übersprechen in Y bei Bewegung in X) | ± 1,5 µm | ± 1,5 µm | ± 1,5 µm | ± 1,5 µm | ± 2,5 µm | ± 2,5 µm | ± 2,5 µm | ± 2,5 µm | ± 3 µm | ± 3 µm | ± 3 µm | ± 3 µm | ± 1,5 µm | ± 1,5 µm | ± 1,5 µm | ± 1,5 µm | ± 1,5 µm | ± 2,5 µm | ± 2,5 µm | ± 2,5 µm | ± 2,5 µm | ± 2,5 µm | ± 3 µm | ± 3 µm | ± 3 µm | ± 3 µm | ± 3 µm | typ. |
| Ebenheit (Lineares Übersprechen in Z bei Bewegung in X) | ± 1,5 µm | ± 1,5 µm | ± 1,5 µm | ± 1,5 µm | ± 2,5 µm | ± 2,5 µm | ± 2,5 µm | ± 2,5 µm | ± 3 µm | ± 3 µm | ± 3 µm | ± 3 µm | ± 1,5 µm | ± 1,5 µm | ± 1,5 µm | ± 1,5 µm | ± 1,5 µm | ± 2,5 µm | ± 2,5 µm | ± 2,5 µm | ± 2,5 µm | ± 2,5 µm | ± 3 µm | ± 3 µm | ± 3 µm | ± 3 µm | ± 3 µm | typ. |
| Neigen (Rotatorisches Übersprechen in θY bei Bewegung in X) | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 60 µrad | ± 60 µrad | ± 60 µrad | ± 60 µrad | ± 70 µrad | ± 70 µrad | ± 70 µrad | ± 70 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 60 µrad | ± 60 µrad | ± 60 µrad | ± 60 µrad | ± 60 µrad | ± 70 µrad | ± 70 µrad | ± 70 µrad | ± 70 µrad | ± 70 µrad | typ. |
| Gieren (Rotatorisches Übersprechen in θZ bei Bewegung in X) | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 60 µrad | ± 60 µrad | ± 60 µrad | ± 60 µrad | ± 70 µrad | ± 70 µrad | ± 70 µrad | ± 70 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 60 µrad | ± 60 µrad | ± 60 µrad | ± 60 µrad | ± 60 µrad | ± 70 µrad | ± 70 µrad | ± 70 µrad | ± 70 µrad | ± 70 µrad | typ. |
| Positionieren | L-511.033111 | L-511.033132 | L-511.035111 | L-511.035132 | L-511.053111 | L-511.053132 | L-511.055111 | L-511.055132 | L-511.073111 | L-511.073132 | L-511.075111 | L-511.075132 | L-511.20AD10 | L-511.20DG10 | L-511.20SD00 | L-511.24AD00 | L-511.2ASD00 | L-511.40AD10 | L-511.40DG10 | L-511.40SD00 | L-511.44AD00 | L-511.4ASD00 | L-511.60AD10 | L-511.60DG10 | L-511.60SD00 | L-511.64AD00 | L-511.6ASD00 | Toleranz |
| Integrierter Sensor | Inkrementeller Linearencoder | Inkrementeller Rotationsencoder | Inkrementeller Linearencoder | Inkrementeller Rotationsencoder | Inkrementeller Linearencoder | Inkrementeller Rotationsencoder | Inkrementeller Linearencoder | Inkrementeller Rotationsencoder | Inkrementeller Linearencoder | Inkrementeller Rotationsencoder | Inkrementeller Linearencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Linearencoder | Inkrementeller Linearencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Linearencoder | Inkrementeller Linearencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Linearencoder | Inkrementeller Linearencoder | ||||
| Unidirektionale Wiederholgenauigkeit in X | 0,1 µm | 0,2 µm | 0,1 µm | 0,2 µm | 0,1 µm | 0,2 µm | 0,1 µm | 0,2 µm | 0,1 µm | 0,2 µm | 0,1 µm | 0,2 µm | 0,488 µm | 0,2 µm | 0,2 µm | 0,1 µm | 0,1 µm | 0,488 µm | 0,2 µm | 0,2 µm | 0,1 µm | 0,1 µm | 0,488 µm | 0,2 µm | 0,2 µm | 0,1 µm | 0,1 µm | typ. |
| Bidirektionale Wiederholgenauigkeit in X | ± 0,1 µm | ± 1,25 µm | ± 0,1 µm | ± 1,25 µm | ± 0,1 µm | ± 1,25 µm | ± 0,1 µm | ± 1,25 µm | ± 0,1 µm | ± 1,25 µm | ± 0,1 µm | ± 1,25 µm | ± 1,25 µm | ± 2 µm | ± 2 µm | ± 0,2 µm | ± 0,2 µm | ± 1,25 µm | ± 2 µm | ± 2 µm | ± 0,2 µm | ± 0,2 µm | ± 1,25 µm | ± 2 µm | ± 2 µm | ± 0,2 µm | ± 0,2 µm | typ. |
| Kleinste Schrittweite in X | 0,1 µm | 0,2 µm | 0,1 µm | 0,2 µm | 0,1 µm | 0,2 µm | 0,1 µm | 0,2 µm | 0,1 µm | 0,2 µm | 0,1 µm | 0,2 µm | 0,488 µm | 0,1 µm | 0,2 µm | 0,1 µm | 0,02 µm | 0,488 µm | 0,1 µm | 0,2 µm | 0,1 µm | 0,02 µm | 0,488 µm | 0,1 µm | 0,2 µm | 0,1 µm | 0,02 µm | typ. |
| Sensorsignal | Sin/Cos, 1 V Spitze-Spitze | A/B-Quadratur, RS-422 | Sin/Cos, 1 V Spitze-Spitze | A/B-Quadratur, RS-422 | Sin/Cos, 1 V Spitze-Spitze | A/B-Quadratur, RS-422 | Sin/Cos, 1 V Spitze-Spitze | A/B-Quadratur, RS-422 | Sin/Cos, 1 V Spitze-Spitze | A/B-Quadratur, RS-422 | Sin/Cos, 1 V Spitze-Spitze | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | Sin/Cos, 1 V Spitze-Spitze | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | Sin/Cos, 1 V Spitze-Spitze | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | Sin/Cos, 1 V Spitze-Spitze | ||||
| Referenzschalter | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | |
| Endschalter | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | |
| Sensorauflösung | 20000 Impulse/U | 20000 Impulse/U | 20000 Impulse/U | 20000 Impulse/U | 20000 Impulse/U | 20000 Impulse/U | 16384 Impulse/U | 4096 Impulse/U | 16384 Impulse/U | 4096 Impulse/U | 16384 Impulse/U | 4096 Impulse/U | ||||||||||||||||
| Sensorsignalperiode | 20 µm | 20 µm | 20 µm | |||||||||||||||||||||||||
| Motorencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | ||||||||||||||||||||||
| Auflösung Motorencoder | 20000 Impulse/U | 20000 Impulse/U | 20000 Impulse/U | 20000 Impulse/U | 20000 Impulse/U | 20000 Impulse/U | ||||||||||||||||||||||
| Sensorsignal Motorencoder | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | |||||||||||||||||||||||||
| Umkehrspiel in X | 1 µm | 1 µm | 1 µm | typ. | ||||||||||||||||||||||||
| Sensorauflösung | 50 nm | 5 nm | 50 nm | 5 nm | 50 nm | 5 nm | ||||||||||||||||||||||
| Antriebseigenschaften | L-511.033111 | L-511.033132 | L-511.035111 | L-511.035132 | L-511.053111 | L-511.053132 | L-511.055111 | L-511.055132 | L-511.073111 | L-511.073132 | L-511.075111 | L-511.075132 | L-511.20AD10 | L-511.20DG10 | L-511.20SD00 | L-511.24AD00 | L-511.2ASD00 | L-511.40AD10 | L-511.40DG10 | L-511.40SD00 | L-511.44AD00 | L-511.4ASD00 | L-511.60AD10 | L-511.60DG10 | L-511.60SD00 | L-511.64AD00 | L-511.6ASD00 | Toleranz |
| Antriebstyp | DC-Motor | DC-Motor | Bürstenloser DC-Motor | Bürstenloser DC-Motor | DC-Motor | DC-Motor | Bürstenloser DC-Motor | Bürstenloser DC-Motor | DC-Motor | DC-Motor | Bürstenloser DC-Motor | Bürstenloser DC-Motor | DC-Motor mit ActiveDrive | DC-Getriebemotor | 2-Phasen-Schrittmotor | DC-Motor mit ActiveDrive | 2-Phasen-Schrittmotor | DC-Motor mit ActiveDrive | DC-Getriebemotor | 2-Phasen-Schrittmotor | DC-Motor mit ActiveDrive | 2-Phasen-Schrittmotor | DC-Motor mit ActiveDrive | DC-Getriebemotor | 2-Phasen-Schrittmotor | DC-Motor mit ActiveDrive | 2-Phasen-Schrittmotor | |
| Nennspannung | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | |
| Spitzenspannung | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | 24 V | 48 V | 48 V | 24 V | 48 V | 24 V | 48 V | 48 V | 24 V | 48 V | 24 V | 48 V | 48 V | 24 V | 48 V | |
| Antriebskraft in negativer Bewegungsrichtung in X | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | typ. |
| Antriebskraft in positiver Bewegungsrichtung in X | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | typ. |
| Nennstrom, effektiv | 2,42 A | 2,42 A | 2,42 A | 2,42 A | 2,42 A | 2,42 A | typ. | |||||||||||||||||||||
| Drehmomentkonstante | 0,031 N·m/A | 0,031 N·m/A | 0,031 N·m/A | 0,031 N·m/A | 0,031 N·m/A | 0,031 N·m/A | typ. | |||||||||||||||||||||
| Widerstand Phase-Phase | 0,81 Ω | 0,81 Ω | 0,81 Ω | 0,81 Ω | 0,81 Ω | 0,81 Ω | 1,63 Ω | 4,09 Ω | 3,3 Ω | 1,63 Ω | 3,3 Ω | 1,63 Ω | 4,09 Ω | 3,3 Ω | 1,63 Ω | 3,3 Ω | 1,63 Ω | 4,09 Ω | 3,3 Ω | 1,63 Ω | 3,3 Ω | typ. | ||||||
| Induktivität Phase-Phase | 0,64 mH | 0,64 mH | 0,64 mH | 0,64 mH | 0,64 mH | 0,64 mH | 0,27 mH | 0,18 mH | 2,8 mH | 0,27 mH | 2,8 mH | 0,27 mH | 0,18 mH | 2,8 mH | 0,27 mH | 2,8 mH | 0,27 mH | 0,18 mH | 2,8 mH | 0,27 mH | 2,8 mH | |||||||
| Gegen-EMK Phase-Phase, rotatorisch | 3,3 V/kRPM | 3,3 V/kRPM | 3,3 V/kRPM | 3,3 V/kRPM | 3,3 V/kRPM | 3,3 V/kRPM | 3,95 V/kRPM | 1,68 V/kRPM | 3,95 V/kRPM | 3,95 V/kRPM | 1,68 V/kRPM | 3,95 V/kRPM | 3,95 V/kRPM | 1,68 V/kRPM | 3,95 V/kRPM | max. | ||||||||||||
| Polpaarzahl | 7 | 7 | 7 | 7 | 7 | 7 | ||||||||||||||||||||||
| Gegen-EMK, rotatorisch | 1,68 V/kRPM | 1,68 V/kRPM | 1,68 V/kRPM | max. | ||||||||||||||||||||||||
| Motorauflösung | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | |||||||||||||||||||||||||
| Mechanische Eigenschaften | L-511.033111 | L-511.033132 | L-511.035111 | L-511.035132 | L-511.053111 | L-511.053132 | L-511.055111 | L-511.055132 | L-511.073111 | L-511.073132 | L-511.075111 | L-511.075132 | L-511.20AD10 | L-511.20DG10 | L-511.20SD00 | L-511.24AD00 | L-511.2ASD00 | L-511.40AD10 | L-511.40DG10 | L-511.40SD00 | L-511.44AD00 | L-511.4ASD00 | L-511.60AD10 | L-511.60DG10 | L-511.60SD00 | L-511.64AD00 | L-511.6ASD00 | Toleranz |
| Führung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | |
| Spindeltyp | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | |
| Spindelsteigung | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | |
| Bewegte Masse in X, unbelastet | 600 g | 600 g | 600 g | 600 g | 600 g | 600 g | 600 g | 600 g | 650 g | 650 g | 650 g | 650 g | 600 g | 600 g | 600 g | 600 g | 600 g | 600 g | 600 g | 600 g | 600 g | 600 g | 650 g | 650 g | 650 g | 650 g | 650 g | |
| Zulässige Druckkraft in Y | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | max. |
| Zulässige Druckkraft in Z | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | max. |
| Zulässige Zugkraft in Y | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | max. |
| Zulässiges Moment in θX | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | 60 N·m | max. |
| Zulässiges Moment in θY | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | max. |
| Zulässiges Moment in θZ | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 60 N·m | 30 N·m | 30 N·m | 60 N·m | 30 N·m | 60 N·m | 30 N·m | 30 N·m | 60 N·m | 30 N·m | 60 N·m | 30 N·m | 30 N·m | 60 N·m | 30 N·m | max. |
| Gesamtmasse | 2500 g | 2500 g | 2400 g | 2400 g | 2600 g | 2600 g | 2700 g | 2700 g | 3100 g | 3100 g | 3000 g | 3000 g | 2500 g | 2500 g | 2400 g | 2500 g | 2400 g | 2800 g | 2700 g | 2600 g | 2700 g | 2600 g | 3300 g | 2900 g | 3100 g | 3500 g | 3100 g | |
| Material | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Edelstahl | Aluminium, Stahl | Aluminium, Edelstahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Edelstahl | Aluminium, Stahl | Aluminium, Edelstahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Edelstahl | Aluminium, Stahl | |
| Getriebeuntersetzung i | 1 | 1 | 1 | 1 | 1 | 1 | 29,642 | 29,642 | 29,642 | |||||||||||||||||||
| Zulässige Druckkraft in X | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | max. | ||||||||||||||||||
| Haltekraft in X, passiv | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | |||||||||||||||||||
| Anschlüsse und Umgebung | L-511.033111 | L-511.033132 | L-511.035111 | L-511.035132 | L-511.053111 | L-511.053132 | L-511.055111 | L-511.055132 | L-511.073111 | L-511.073132 | L-511.075111 | L-511.075132 | L-511.20AD10 | L-511.20DG10 | L-511.20SD00 | L-511.24AD00 | L-511.2ASD00 | L-511.40AD10 | L-511.40DG10 | L-511.40SD00 | L-511.44AD00 | L-511.4ASD00 | L-511.60AD10 | L-511.60DG10 | L-511.60SD00 | L-511.64AD00 | L-511.6ASD00 | Toleranz |
| Anschluss | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | D-Sub 15-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | D-Sub 15-polig (m) | HD D-Sub 26-polig (m) | D-Sub 15-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | D-Sub 15-polig (m) | HD D-Sub 26-polig (m) | D-Sub 15-polig (m) | HD D-Sub 26-polig (m) | HD D-Sub 26-polig (m) | D-Sub 15-polig (m) | HD D-Sub 26-polig (m) | |
| Sensoranschluss | D-Sub 9-polig (m) | D-Sub 9-polig (m) | D-Sub 9-polig (m) | D-Sub 9-polig (m) | D-Sub 9-polig (m) | D-Sub 9-polig (m) | D-Sub 9-polig (m) | D-Sub 9-polig (m) | D-Sub 9-polig (m) | |||||||||||||||||||
| Betriebstemperaturbereich | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | |
| Empfohlene Controller / Treiber | C-863 C-885 mit C-863.20C885 C-884 Modularer ACS-Controller | C-863 C-885 mit C-863.20C885 C-884 Modularer ACS-Controller | Modularer ACS-Controller | C-891 C-885 mit C-891.10C885 Modularer ACS-Controller | C-863 C-885 mit C-863.20C885 C-884 Modularer ACS-Controller | C-863 C-885 mit C-863.20C885 C-884 Modularer ACS-Controller | Modularer ACS-Controller | C-891 C-885 mit C-891.10C885 Modularer ACS-Controller | C-863 C-885 mit C-863.20C885 C-884 Modularer ACS-Controller | C-863 C-885 mit C-863.20C885 C-884 Modularer ACS-Controller | Modularer ACS-Controller | C-891 C-885 mit C-891.10C885 Modularer ACS-Controller | C-863 C-885 mit C-863.20C885 C-884 | C-863 C-885 mit C-863.20C885 C-884 Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 Modularer ACS-Controller | C-863 C-885 mit C-863.20C885 C-884 | C-663.12 C-885 mit C-663.12C885 Modularer ACS-Controller | C-863 C-885 mit C-863.20C885 C-884 | C-863 C-885 mit C-863.20C885 C-884 Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 Modularer ACS-Controller | C-863 C-885 mit C-863.20C885 C-884 | C-663.12 C-885 mit C-663.12C885 Modularer ACS-Controller | C-863 C-885 mit C-863.20C885 C-884 | C-863 C-885 mit C-863.20C885 C-884 Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 Modularer ACS-Controller | C-863 C-885 mit C-863.20C885 C-884 | C-663.12 C-885 mit C-663.12C885 Modularer ACS-Controller |
L-511 Hochpräziser Lineartisch
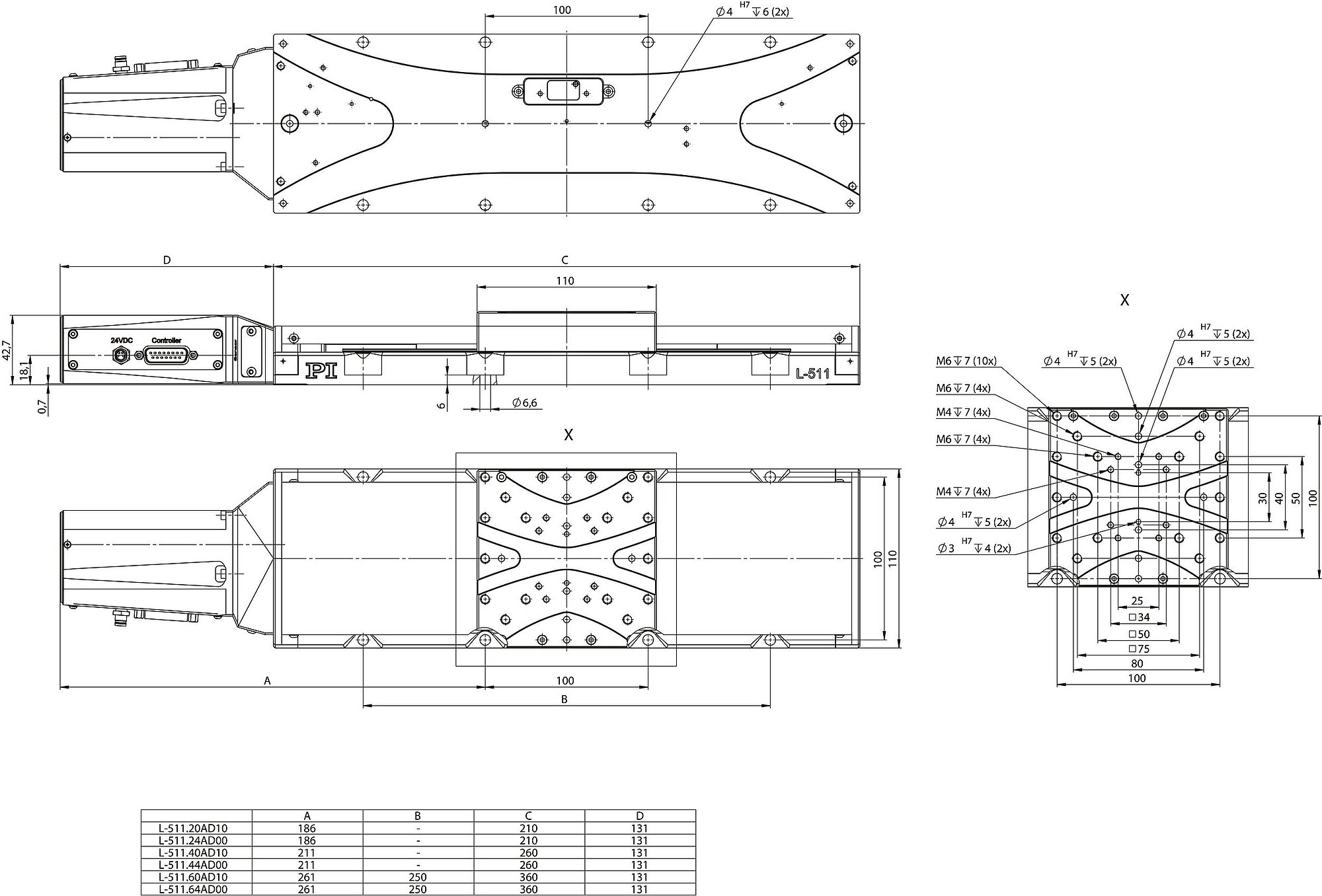
L-511.xxADx0 3D-Modell
3D-Modell L-511.x0DG10
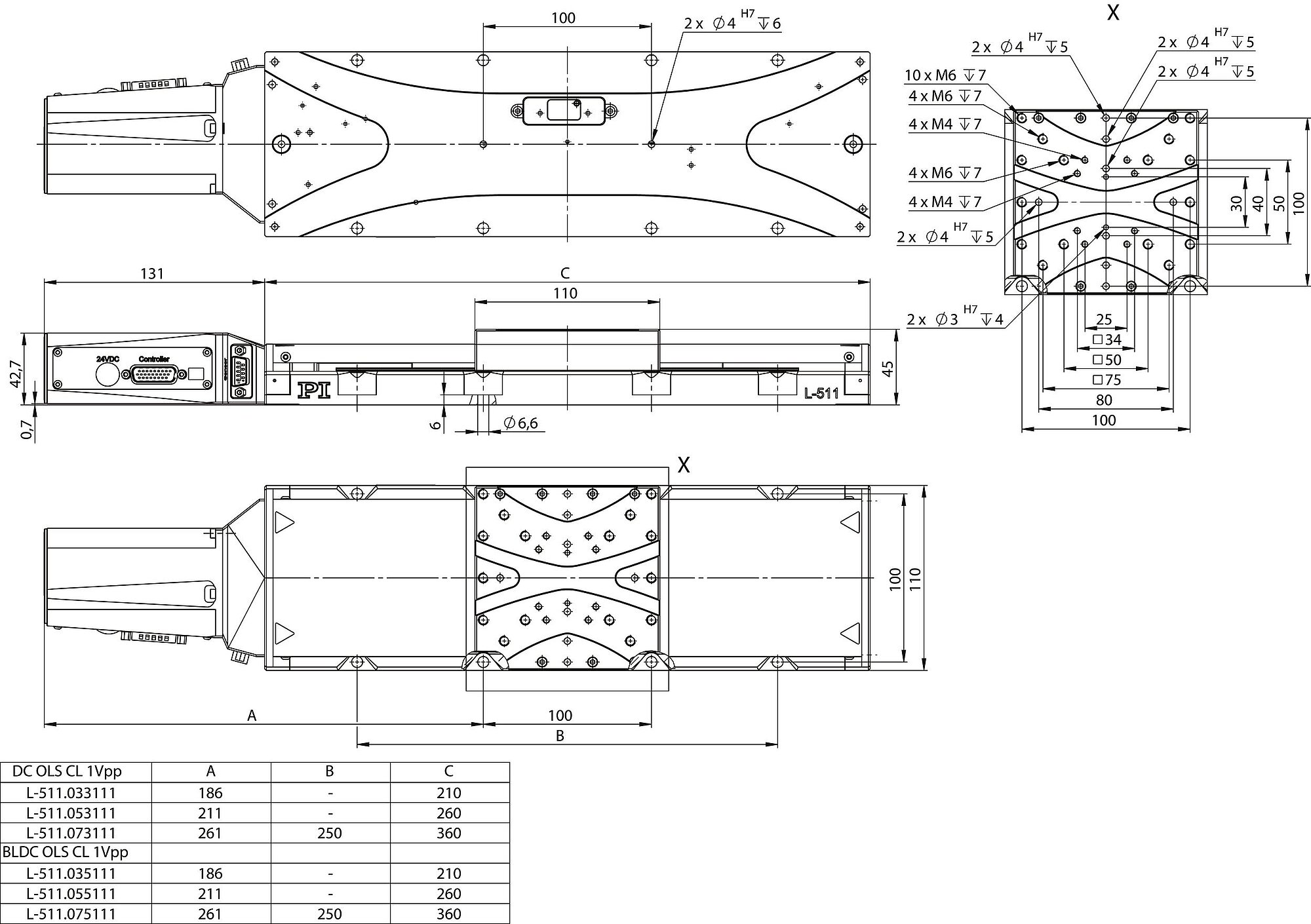
3D-Modell L-511.0xx111
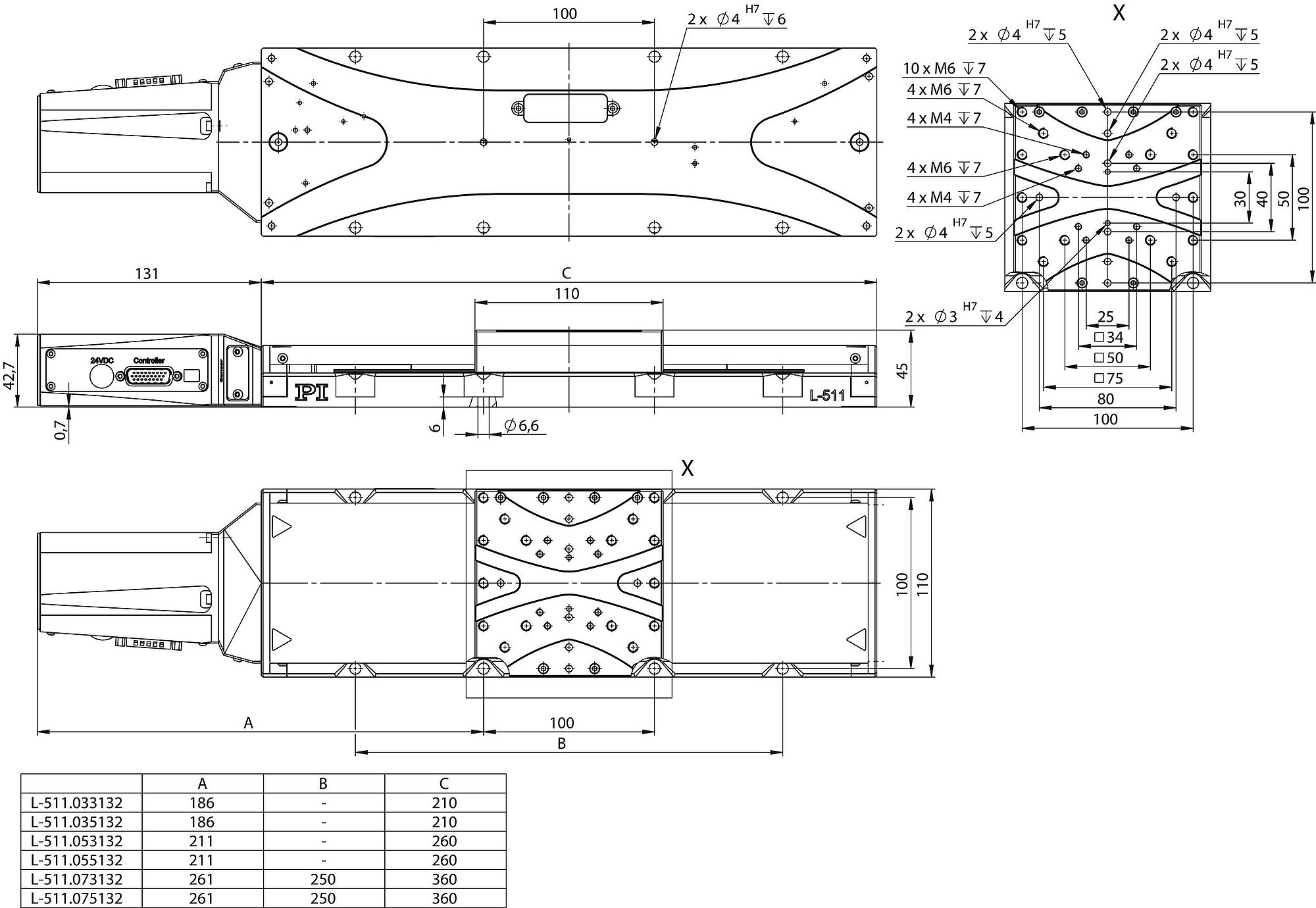
3D-Modell L-511.0xx132
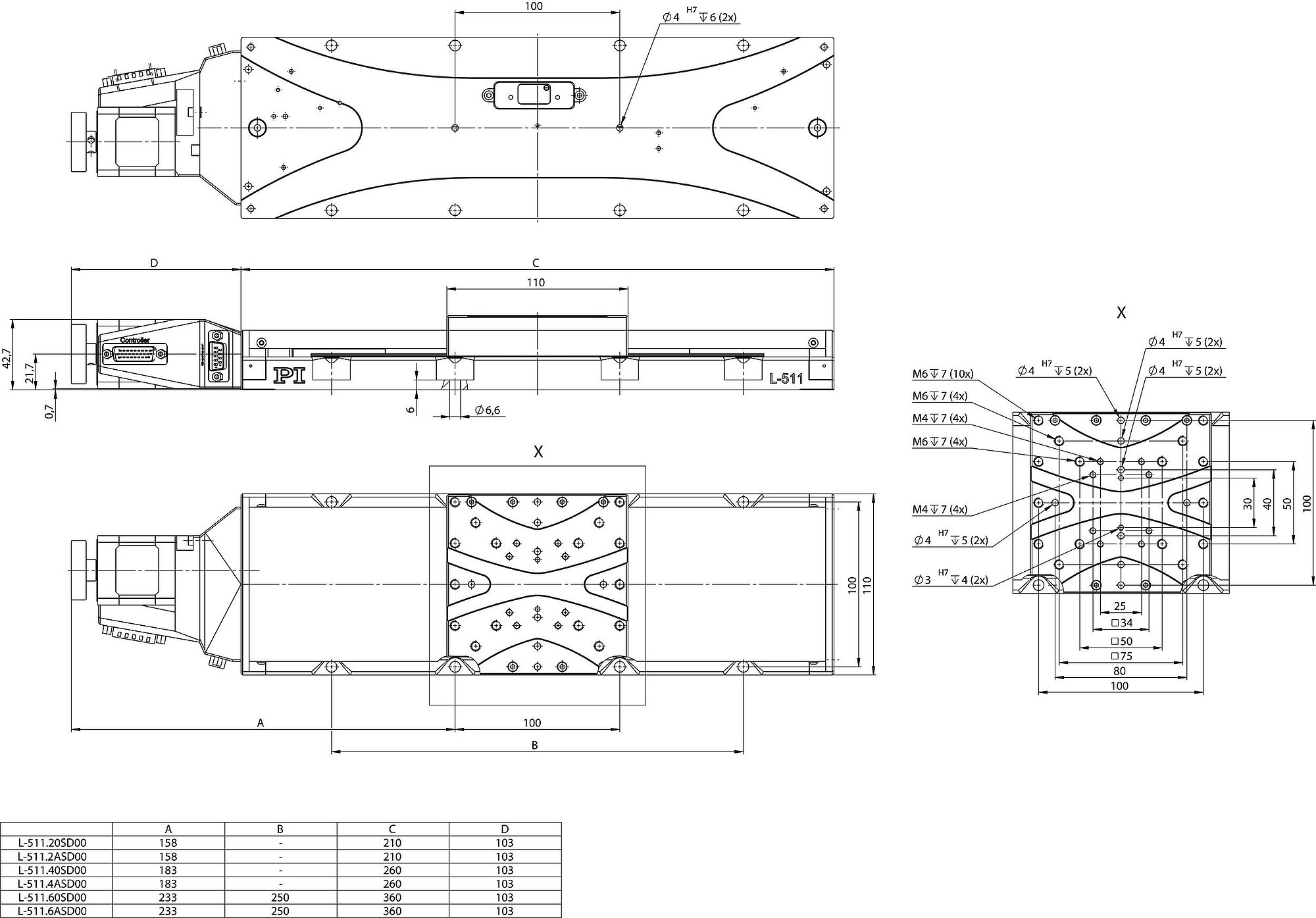
L-511.xxSD00 3D Modell
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Hochpräziser Lineartisch; DC-Motor; 52 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, Sin/Cos, 1 V Spitze-Spitze
Hochpräziser Lineartisch; DC-Motor; 52 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 20000 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Hochpräziser Lineartisch; Bürstenloser DC-Motor; 52 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 20000 Impulse/U Auflösung, A/B-Quadratur, RS-422; Inkrementeller Linearencoder, 20 µm Sensorsignalperiode, Sin/Cos, 1 V Spitze-Spitze
Hochpräziser Lineartisch; Bürstenloser DC-Motor; 52 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 20000 Impulse/U Auflösung; Inkrementeller Rotationsencoder, 20000 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Hochpräziser Lineartisch; DC-Motor; 102 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, Sin/Cos, 1 V Spitze-Spitze
Hochpräziser Lineartisch; DC-Motor; 102 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 20000 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Hochpräziser Lineartisch; Bürstenloser DC-Motor; 102 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 20000 Impulse/U Auflösung, A/B-Quadratur, RS-422; Inkrementeller Linearencoder, 20 µm Sensorsignalperiode, Sin/Cos, 1 V Spitze-Spitze
Hochpräziser Lineartisch; Bürstenloser DC-Motor; 102 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 20000 Impulse/U Auflösung; Inkrementeller Rotationsencoder, 20000 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Hochpräziser Lineartisch; DC-Motor; 155 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, Sin/Cos, 1 V Spitze-Spitze
Hochpräziser Lineartisch; DC-Motor; 155 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 20000 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Hochpräziser Lineartisch; Bürstenloser DC-Motor; 155 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 20000 Impulse/U Auflösung, A/B-Quadratur, RS-422; Inkrementeller Linearencoder, 20 µm Sensorsignalperiode, Sin/Cos, 1 V Spitze-Spitze
Hochpräziser Lineartisch; Bürstenloser DC-Motor; 155 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 20000 Impulse/U Auflösung; Inkrementeller Rotationsencoder, 20000 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Hochpräziser Lineartisch; DC-Motor mit ActiveDrive; 52 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 16384 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Hochpräziser Lineartisch; DC-Getriebemotor; 52 mm Stellweg; 500 N Belastbarkeit; 6 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 4096 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Hochpräziser Lineartisch; 2-Phasen-Schrittmotor; 52 mm Stellweg; 500 N Belastbarkeit; 45 mm/s maximale Geschwindigkeit; Kugelumlaufspindel
Hochpräziser Lineartisch; DC-Motor mit ActiveDrive; 52 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 50 nm Sensorauflösung, A/B-Quadratur, RS-422
Hochpräziser Lineartisch; 2-Phasen-Schrittmotor; 52 mm Stellweg; 500 N Belastbarkeit; 45 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 5 nm Sensorauflösung, Sin/Cos, 1 V Spitze-Spitze
Hochpräziser Lineartisch; DC-Motor mit ActiveDrive; 102 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 16384 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Hochpräziser Lineartisch; DC-Getriebemotor; 102 mm Stellweg; 500 N Belastbarkeit; 6 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 4096 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Hochpräziser Lineartisch; 2-Phasen-Schrittmotor; 102 mm Stellweg; 500 N Belastbarkeit; 45 mm/s maximale Geschwindigkeit; Kugelumlaufspindel
Hochpräziser Lineartisch; DC-Motor mit ActiveDrive; 102 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 50 nm Sensorauflösung, A/B-Quadratur, RS-422
Hochpräziser Lineartisch; 2-Phasen-Schrittmotor; 102 mm Stellweg; 500 N Belastbarkeit; 45 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 5 nm Sensorauflösung, Sin/Cos, 1 V Spitze-Spitze
Hochpräziser Lineartisch; DC-Motor mit ActiveDrive; 155 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 16384 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Hochpräziser Lineartisch; DC-Getriebemotor; 155 mm Stellweg; 500 N Belastbarkeit; 6 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 4096 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Hochpräziser Lineartisch; 2-Phasen-Schrittmotor; 155 mm Stellweg; 500 N Belastbarkeit; 45 mm/s maximale Geschwindigkeit; Kugelumlaufspindel
Hochpräziser Lineartisch; DC-Motor mit ActiveDrive; 155 mm Stellweg; 500 N Belastbarkeit; 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 50 nm Sensorauflösung, A/B-Quadratur, RS-422
Hochpräziser Lineartisch; 2-Phasen-Schrittmotor; 155 mm Stellweg; 500 N Belastbarkeit; 45 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 5 nm Sensorauflösung, Sin/Cos, 1 V Spitze-Spitze