|
Aktive Achsen
|
X
|
X
|
X
|
|
|
Stellweg in X
|
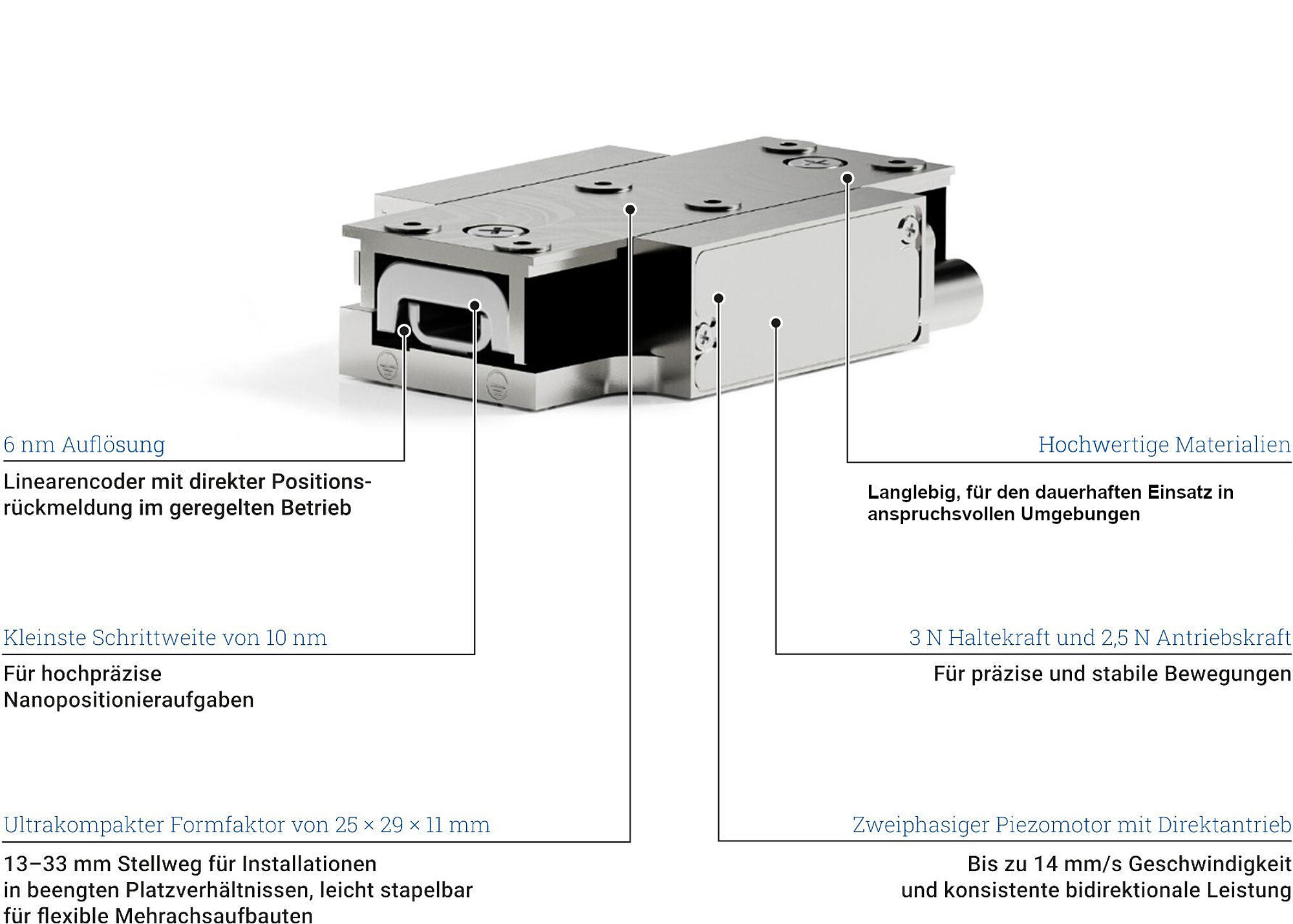
13 mm
|
23 mm
|
33 mm
|
|
|
Maximale Geschwindigkeit in X, unbelastet
|
14 mm/s
|
14 mm/s
|
14 mm/s
|
typ.
|
|
Linearität in X
|
2,5 µm
|
2,5 µm
|
2,5 µm
|
typ.
|
|
Winkelabweichung um Y (Nicken)
|
± 350 µrad
|
± 105 µrad
|
± 80 µrad
|
typ.
|
|
Winkelabweichung um Z (Gieren)
|
± 375 µrad
|
± 400 µrad
|
± 475 µrad
|
typ.
|
|
Positionieren
|
B-421.131
|
B-421.231
|
B-421.331
|
Toleranz
|
|
Kleinste Schrittweite in X
|
0,01 µm
|
0,01 µm
|
0,01 µm
|
typ.
|
|
Unidirektionale Wiederholgenauigkeit in X
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
typ.
|
|
Referenzschalter
|
Optisch, richtungserkennend (Referenzflankenspur), 5 V, TTL
|
Optisch, richtungserkennend (Referenzflankenspur), 5 V, TTL
|
Optisch, richtungserkennend (Referenzflankenspur), 5 V, TTL
|
|
|
Integrierter Sensor
|
Inkrementeller Linearencoder
|
Inkrementeller Linearencoder
|
Inkrementeller Linearencoder
|
|
|
Sensorsignal
|
Sin/Cos, 1 V Spitze-Spitze
|
Sin/Cos, 1 V Spitze-Spitze
|
Sin/Cos, 1 V Spitze-Spitze
|
|
|
Sensorsignalperiode
|
20 µm
|
20 µm
|
20 µm
|
|
|
Sensorauflösung
|
6 nm
|
6 nm
|
6 nm
|
|
|
Antriebseigenschaften
|
B-421.131
|
B-421.231
|
B-421.331
|
Toleranz
|
|
Antriebstyp
|
Biphase-Trägheitsantriebstechnologie BIX
|
Biphase-Trägheitsantriebstechnologie BIX
|
Biphase-Trägheitsantriebstechnologie BIX
|
|
|
Nennstrom, effektiv
|
0,05 A
|
0,05 A
|
0,05 A
|
typ.
|
|
Spitzenstrom, effektiv
|
0,3 A
|
0,3 A
|
0,3 A
|
typ.
|
|
Spitzenstrom, Zeitbegrenzung
|
10 s
|
10 s
|
10 s
|
|
|
Antriebskraft in positiver Bewegungsrichtung in X
|
2,5 N
|
2,5 N
|
2,5 N
|
typ.
|
|
Antriebskraft in negativer Bewegungsrichtung in X
|
2,5 N
|
2,5 N
|
2,5 N
|
typ.
|
|
Mechanische Eigenschaften
|
B-421.131
|
B-421.231
|
B-421.331
|
Toleranz
|
|
Haltekraft in X, passiv
|
3 N
|
3 N
|
3 N
|
min.
|
|
Maximale Nutzlast, Grundplatte horizontal
|
0,5 kg
|
0,5 kg
|
0,5 kg
|
typ.
|
|
Maximale Nutzlast, Grundplatte in beliebiger Ausrichtung
|
0,15 kg
|
0,15 kg
|
0,15 kg
|
typ.
|
|
Führung
|
Kugelführung
|
Kugelführung
|
Kugelführung
|
|
|
Gesamtmasse
|
130 g
|
140 g
|
150 g
|
|
|
Masse ohne Kabel
|
35 g
|
45 g
|
55 g
|
|
|
Material
| Edelstahl | Edelstahl | Edelstahl |
|
|
Anschlüsse und Umgebung
|
B-421.131
|
B-421.231
|
B-421.331
|
Toleranz
|
|
Betriebstemperaturbereich
|
0 bis 40 °C
|
0 bis 40 °C
|
0 bis 40 °C
|
|
|
Anschluss
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
|
|
Kabellänge
|
1,5 m
|
1,5 m
|
1,5 m
|
|
|
Minimaler Biegeradius Kabel
|
40 mm
|
40 mm
|
40 mm
|
|
|
Empfohlene Controller/Treiber
| E-881.1X1R | E-881.1X1R | E-881.1X1R |
|