Einsatzgebiete
Die hohe Präzision macht den H-850.x2IV zum idealen Positioniersystem um Komponenten mit sechs Freiheitsgraden (6-DoF) in Vakuumanwendungen mit Genauigkeiten im Submikrometerbereich zu positionieren und auszurichten, ohne die Vakuumbedingungen zu stören.
Typische Einsatzgebiete in Industrie und Forschung sind beispielsweise die Präzisionsausrichtung von optischen Komponenten in Vakuumkammern, die Positionierung und Ausrichtung von Lithografie- und Inspektionssystemen, die Ausrichtung von Proben oder Strahloptiken in Beamlines von Forschungsanlagen sowie die Ausrichtung und Bewegung von Komponenten in Vakuum-Testkammern für Satelliten oder optische Sensoren.
Präzise Positionierung bei hohen Lasten
Aufgrund seiner hohen Lastkapazität bis zu 80 kg und seiner bewährten Zuverlässigkeit wird der H-850.x2IV typischerweise zur präzisen Positionierung von schweren Versuchsobjekten oder Proben in Vakuumumgebungen eingesetzt. Die H-850.x2IV sind für Vakuumumgebungen bis 10-6 hPa geeignet.
Die hohen Selbsthaltekräfte sorgen für eine hohe Positionsstabilität und bieten den Vorteil, dass der Hexapod auch in stromlosem Zustand die Position hält.
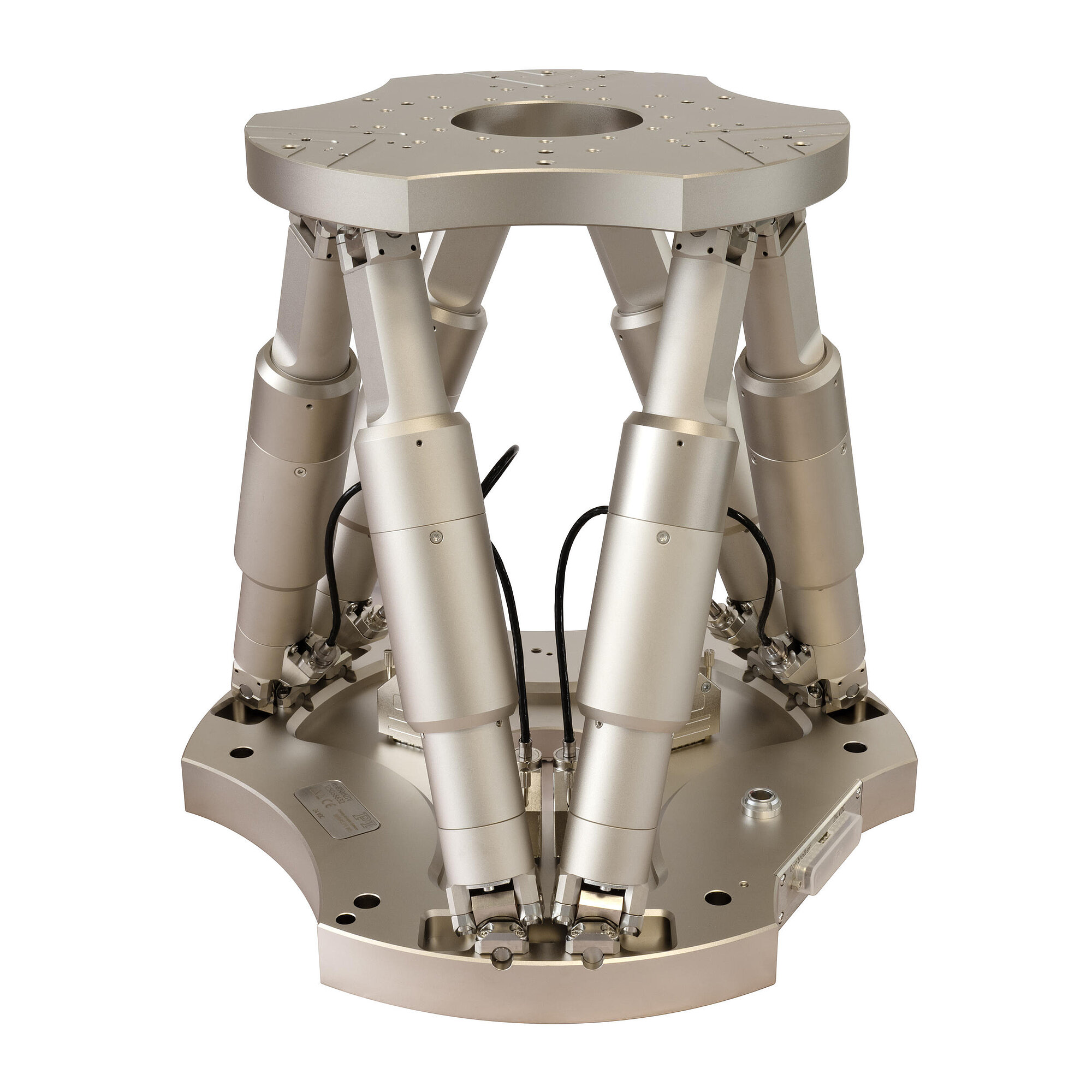
Parallelkinematisches Design
Das parallelkinematische Design für 6 Freiheitsgrade macht den Aufbau wesentlich kompakter und steifer als vergleichbare seriellkinematische Systeme. Die Vorteile gegenüber seriellen, also gestapelten Systemen, sind vor allem die bessere Bahntreue und Wiederholgenauigkeit. Zudem ist die bewegte Masse geringer und ermöglicht dadurch eine verbesserte Dynamik, die für alle Bewegungsachsen gleich ist. Da keine Kabel bewegt werden, ist auch das Kabelmanagement unproblematisch.
Bewegungssimulation zum Schutz des Gesamtsystems
Die Software PIVirtualMove, die kostenfrei heruntergeladen werden kann, simuliert den Stellweg, die Ausrichtung und die zulässigen Kräfte und Momente des H-850.x2IV, um eine optimale Systemkonfiguration zu ermöglichen. Dabei wird sowohl der gewählte Drehpunkt als auch der Lastschwerpunkt berücksichtigt.
Work- und Tool-Koordinatensysteme sowie ein Emulationstool sind in dem kostenfreien Softwarepaket enthalten, das zum Lieferumfang des Hexapod-Controllers gehört. Die bereitgestellten Tools helfen, kritische Komponenten wie z. B. optische Bauteile in Vakuumumgebungen zu schützen.