H-815.D6A3 NEU!
Hexapod für industrielle Präzisionsanwendungen; BLDC-Motor; 10 kg Nutzlast; 20 mm/s maximale Geschwindigkeit; absolut messender Encoder. Anschlusskabel sind nicht im Lieferumfang enthalten und müssen separat bestellt werden.

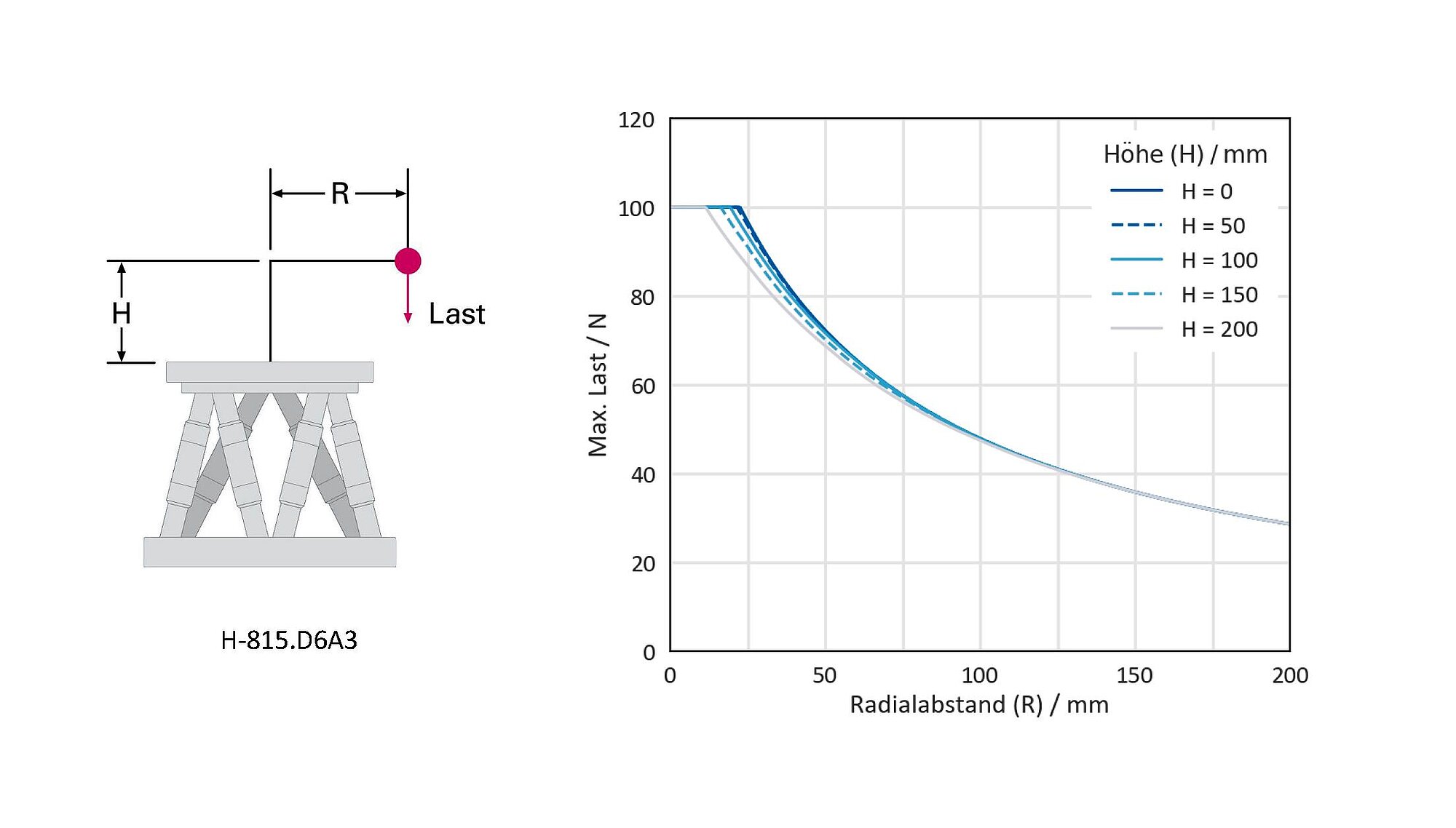
Belastungsgrenzen des H-815.D6A3 bei horizontaler Montage
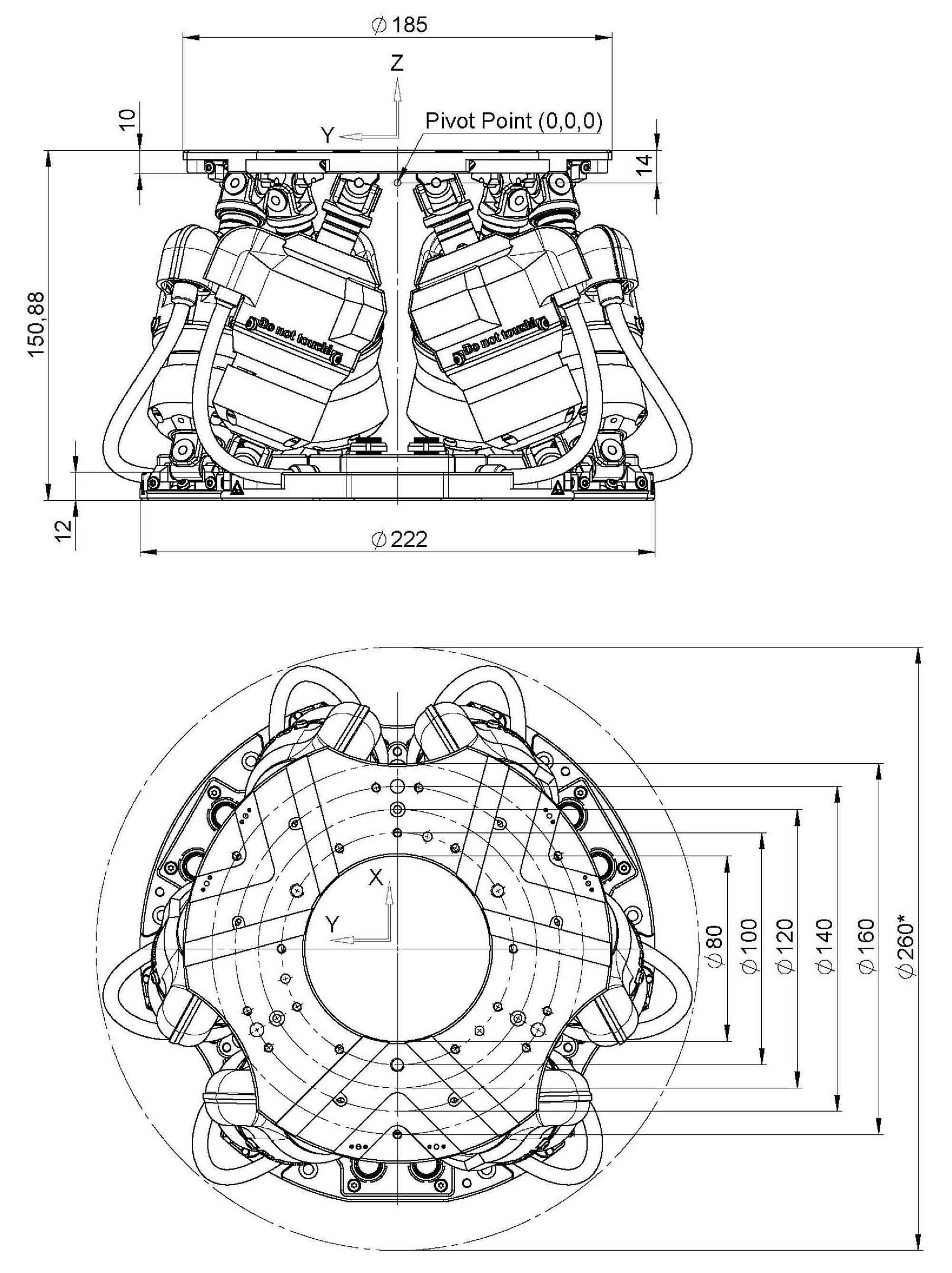
H-815, Abmessungen in mm, bei Nullposition des Nominalstellwegs. *Die max. Abmessung mit Kabeln kann variieren.
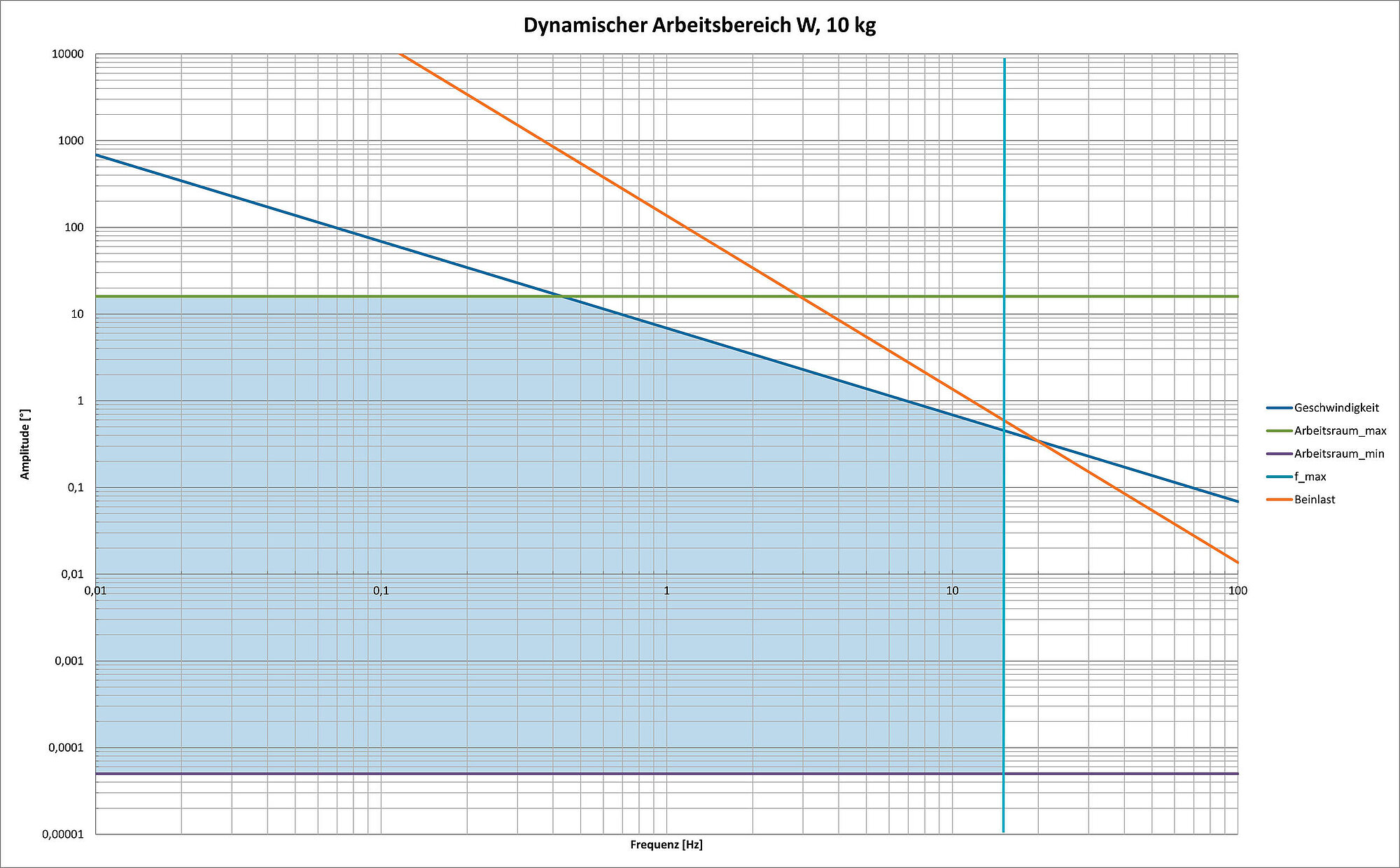
Dynamischer Arbeitsbereich des H-815.D6A3, W (ƟZ), 10 kg
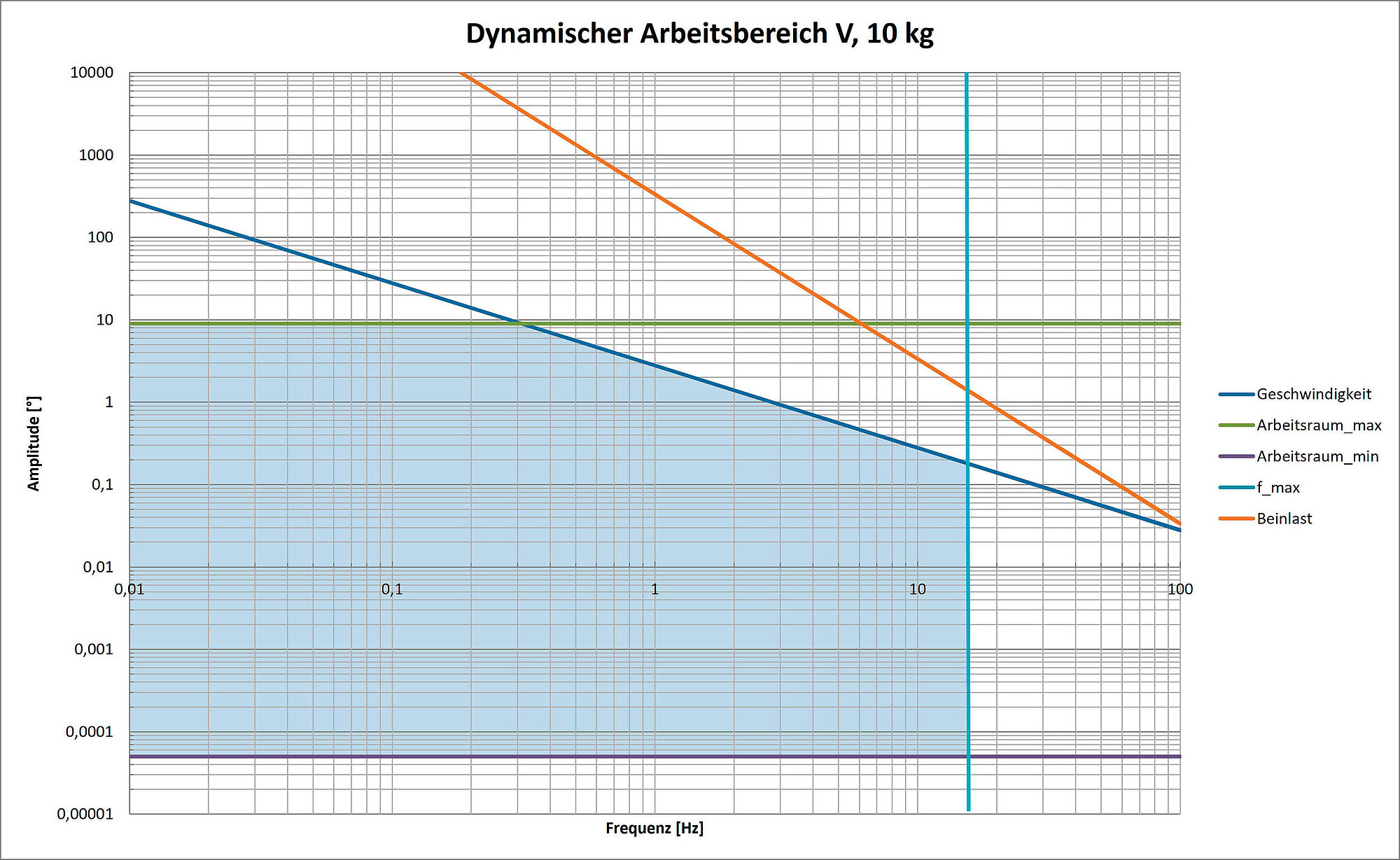
Dynamischer Arbeitsbereich des H-815.D6A3, V (ƟY), 10 kg
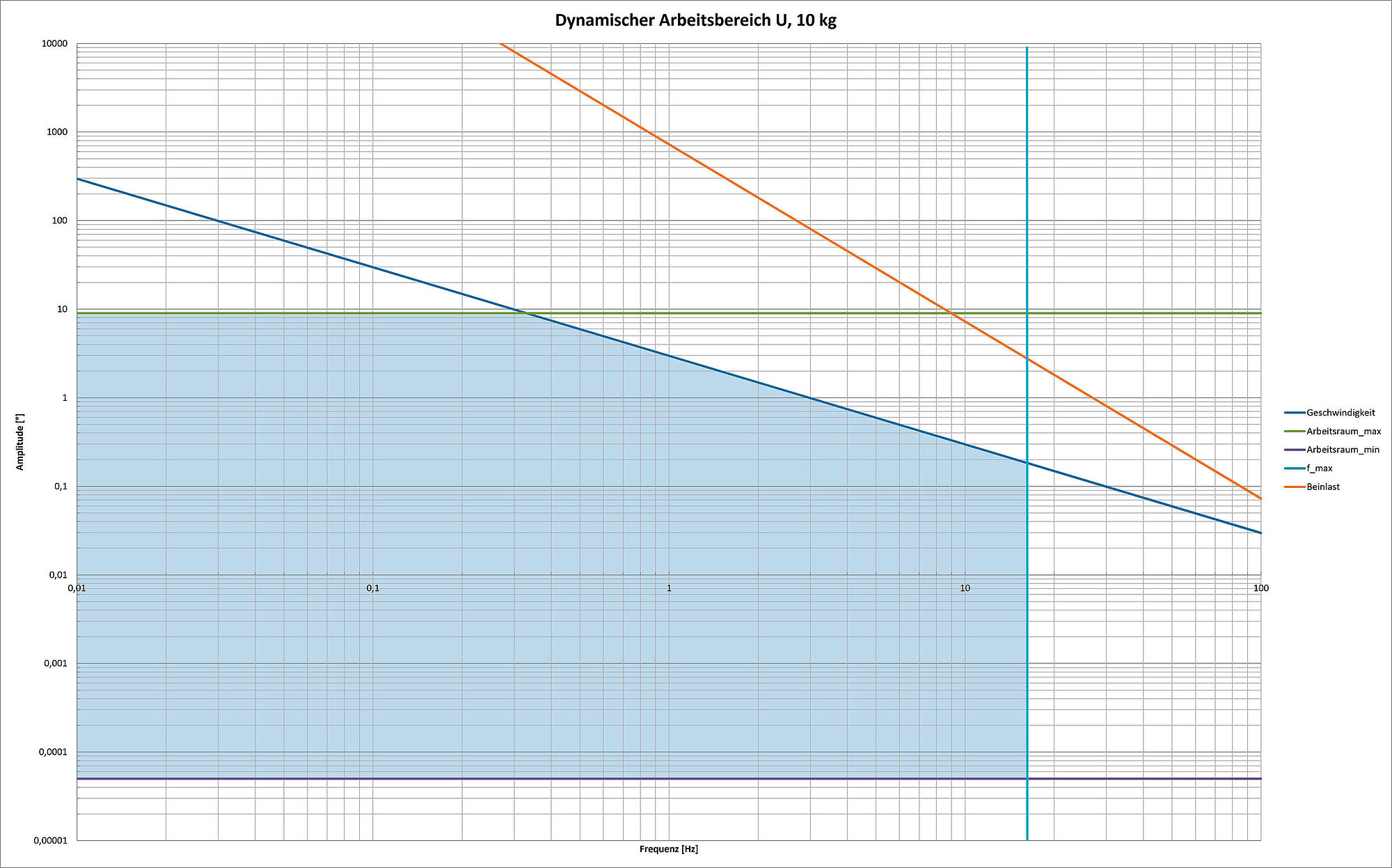
Dynamischer Arbeitsbereich des H-815.D6A3, U (ƟX), 10 kg
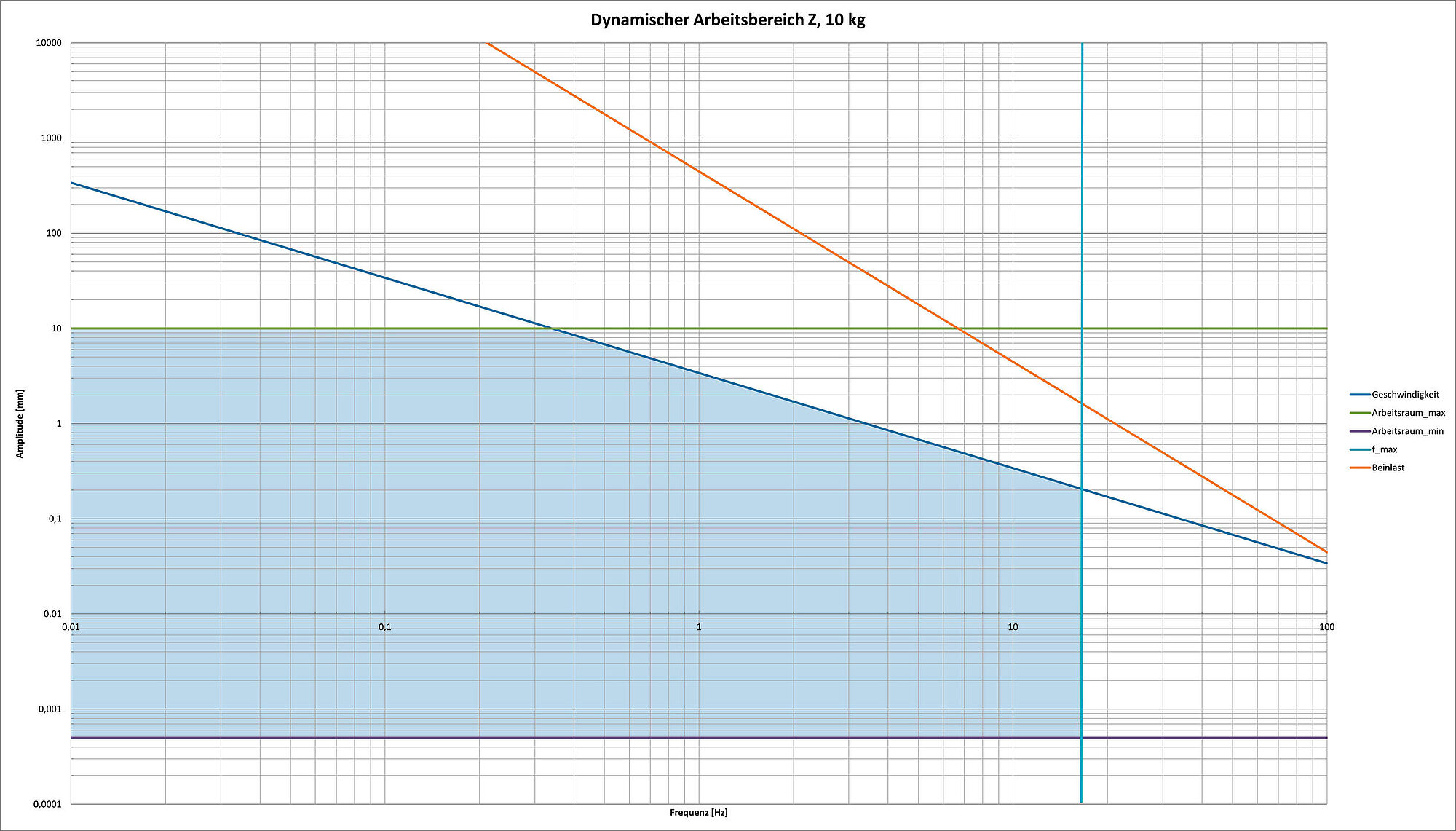
Dynamischer Arbeitsbereich des H-815.D6A3, Z, 10 kg
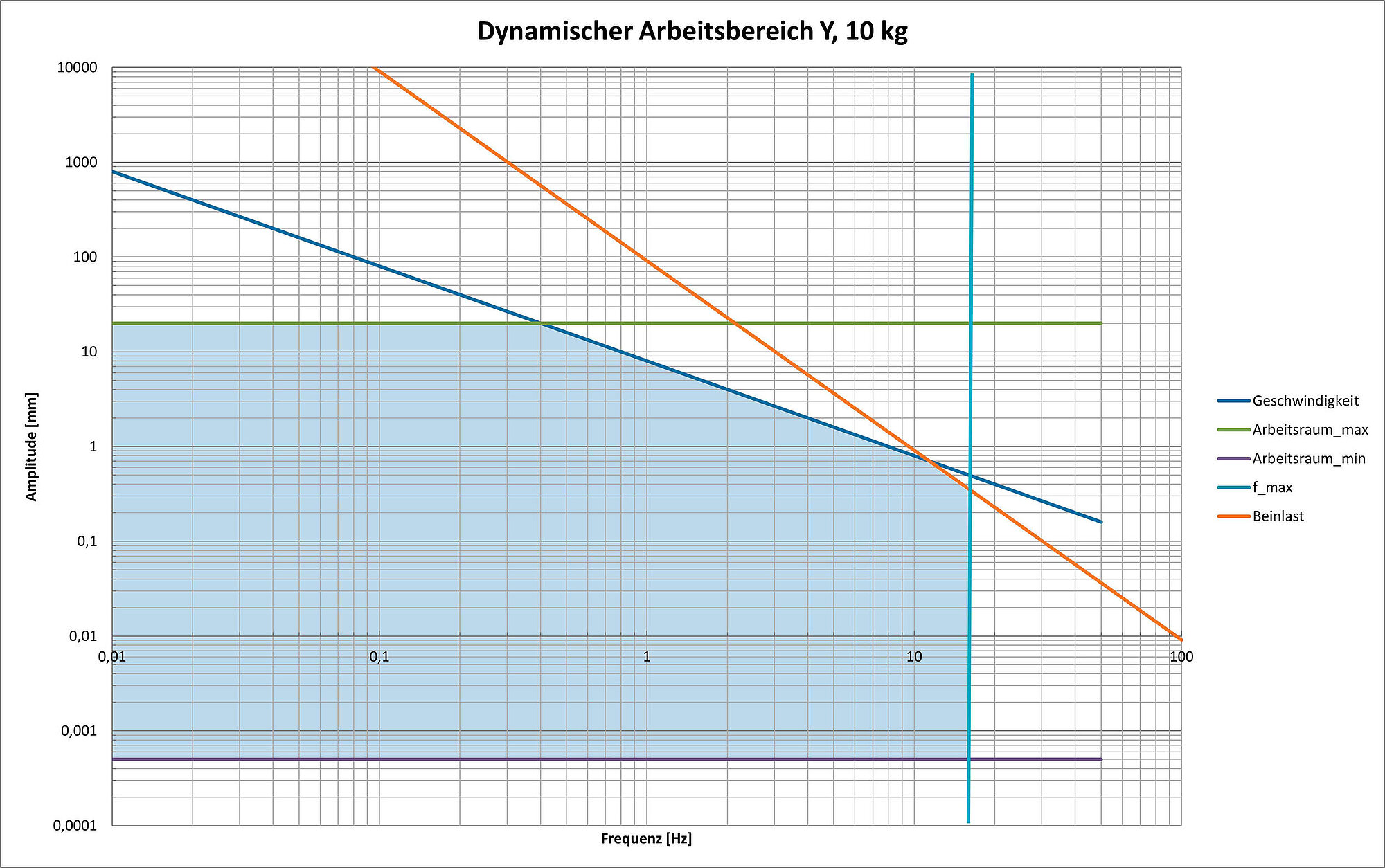
Dynamischer Arbeitsbereich des H-815.D6A3, Y, 10 kg
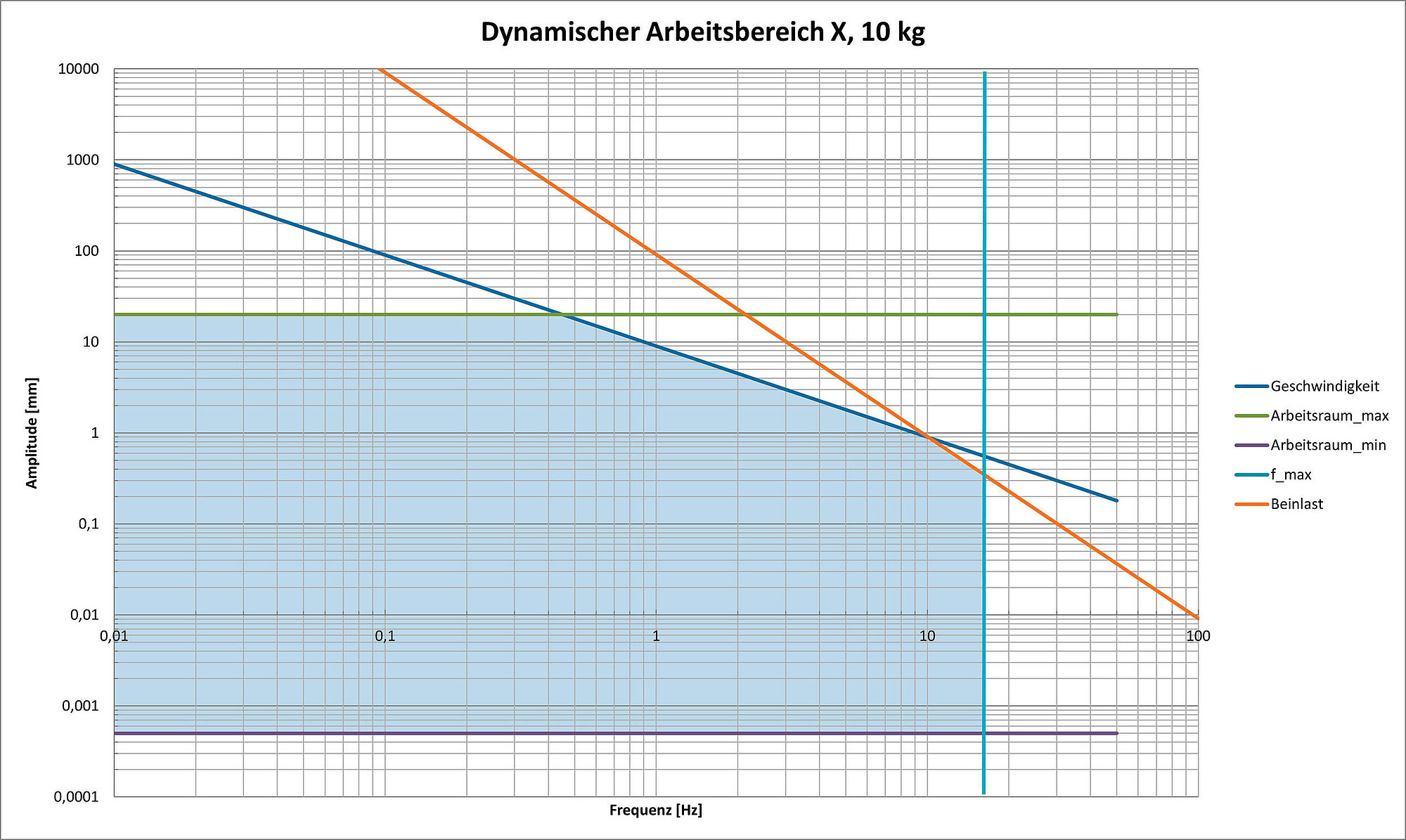
Dynamischer Arbeitsbereich des H-815.D6A3, X, 10 kg
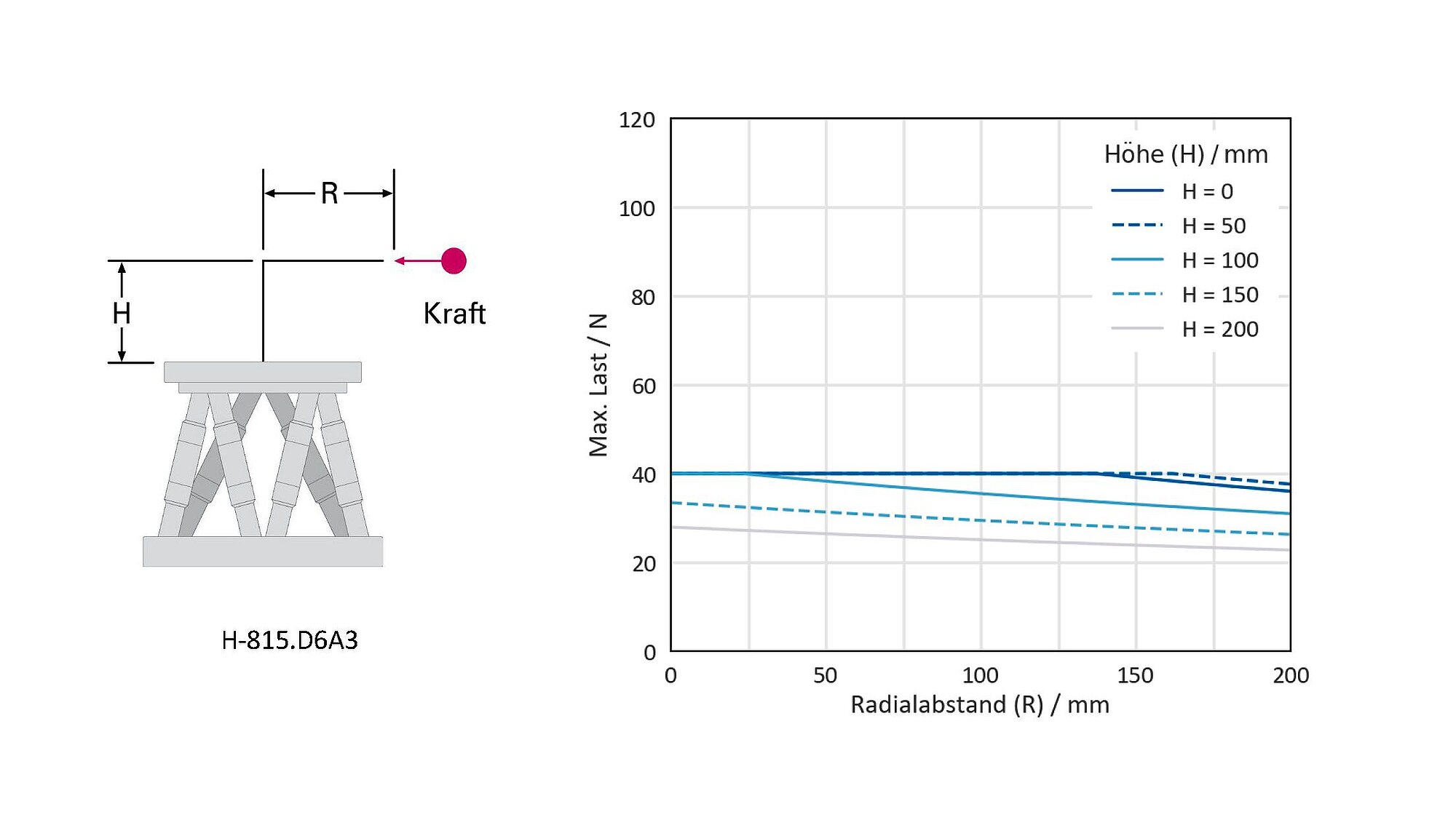
Maximal zulässige Krafteinwirkung auf den H-815.D6A3 bei horizontaler Montage
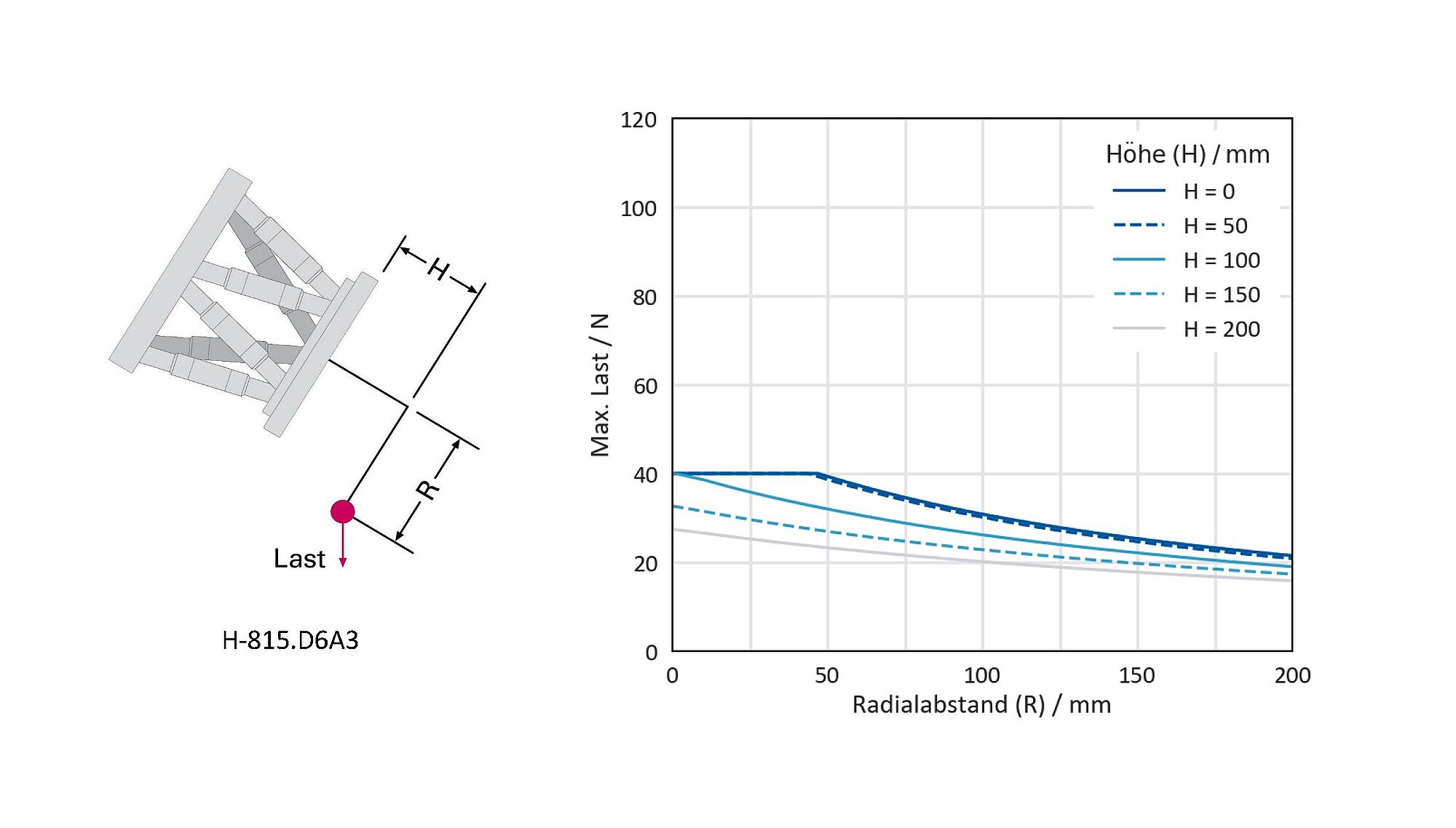
Belastungsgrenzen des H-815.D6A3 bei Montage unter ungünstigstem Winkel
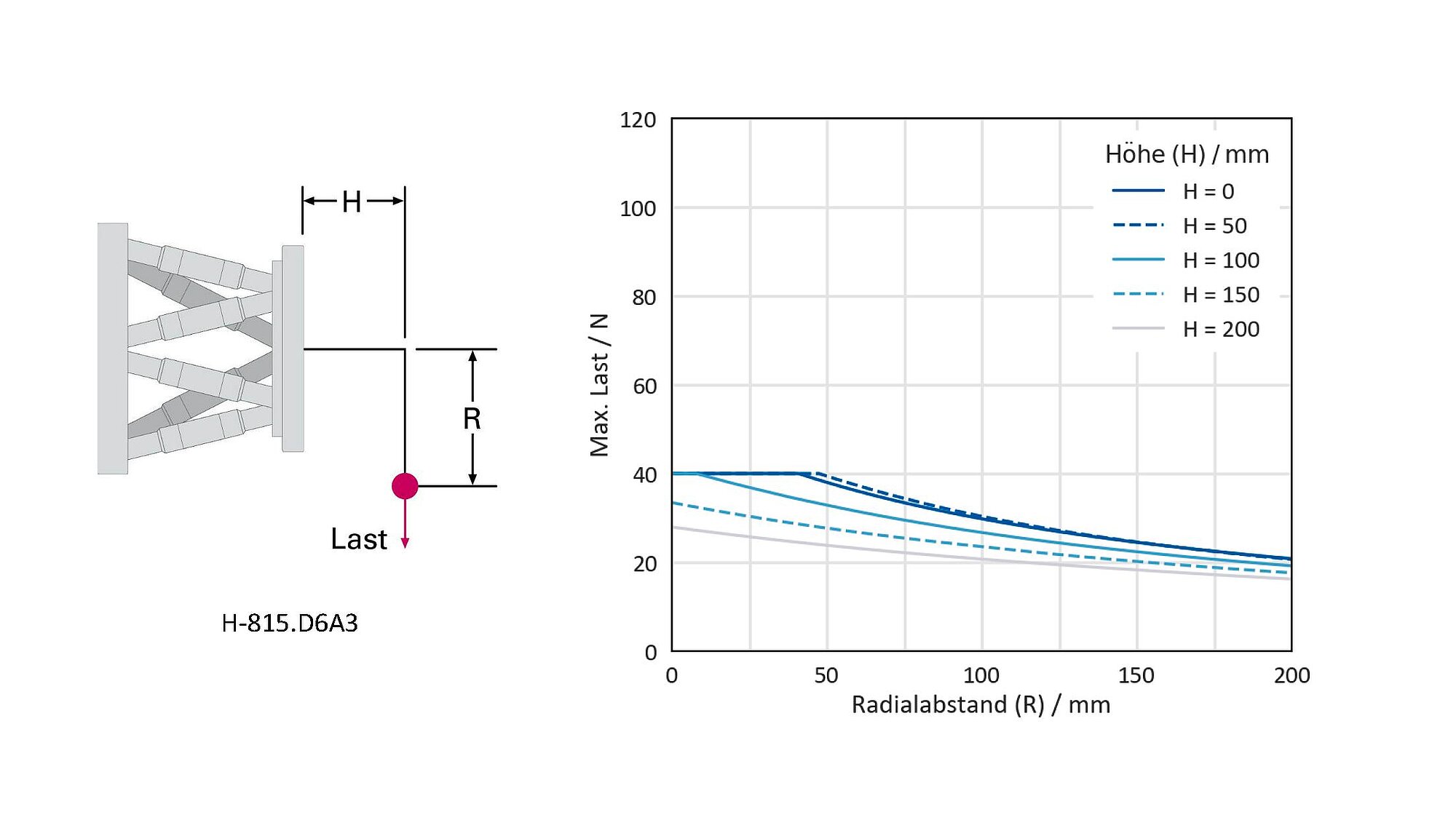
Belastungsgrenzen des H-815.D6A3 bei vertikaler Montage













Der H-815 Hexapod ist ein hochpräzises, mehrachsiges Bewegungs- und Positioniersystem für anspruchsvolle Ausrichtungsprozesse in der Photonik. Durch hohe Präzision und Wiederholgenauigkeit eignet sich der H-815 ideal für das Ausrichten kleinster Komponenten, wie zum Beispiel Linsen oder andere optische Bauteile. Dabei führt der Hexapod komplexe Positionieraufgaben in 6 Freiheitsgraden schnell, präzise und reproduzierbar aus. Dank des robusten Designs bietet der Industrie-Hexapod eine außergewöhnlich hohe Langlebigkeit und Zuverlässigkeit. Der H-815 ist für den dauerhaften Einsatz in industriellen Automatisierungs- und Montageprozessen in anspruchsvollen Umgebungen ausgelegt. Dabei steigert der H-815 die Produktivität komplexer Fertigungs- und Messverfahren.
Einsatzgebiete
Stewart-Plattform für hohe Belastungen und 24/7-Dauerbetrieb
Der H-815 zeichnet sich durch besondere Zuverlässigkeit, hohe Geschwindigkeit und präzise Bewegungen für Anwendungen in der Silizium-Photonik, Halbleiterfertigung, Optik und Messtechnik aus. Seine Kombination aus Präzision, Flexibilität und Langlebigkeit macht ihn zur idealen Wahl für moderne, hochpräzise Ausrichtungsaufgaben. Der Industrie-Hexapod H-815 ist ein kompaktes und robustes parallelkinematisches Bewegungssystem, das für den 24/7-Dauerbetrieb in industriellen Umgebungen entwickelt wurde.
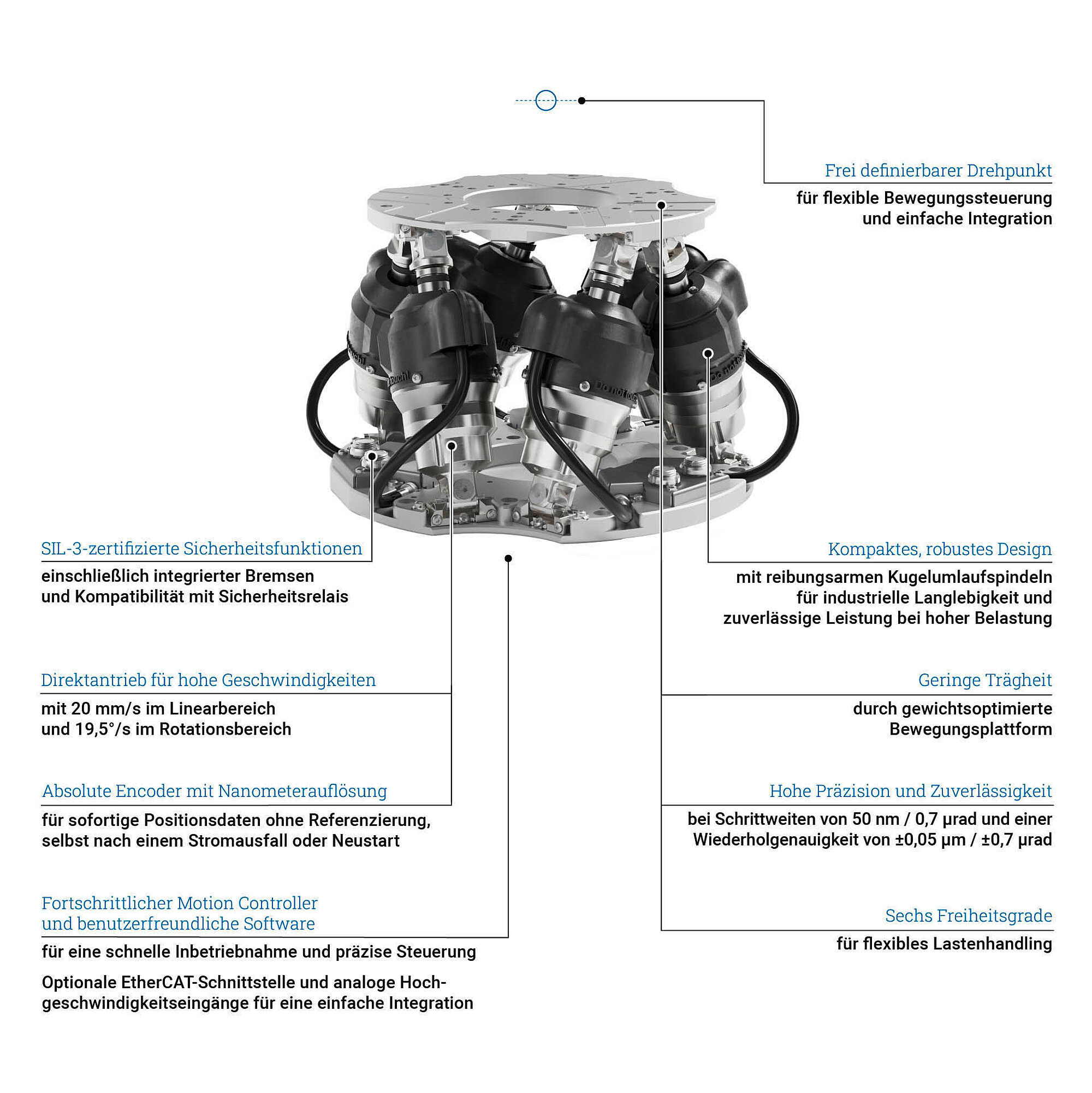
Höchste Robustheit in kompaktem Bauraum
Aufgrund des parallelkinematischen Designs kann der H-815 Bewegungen in 6 Achsen in äußerst kompakter Bauform ausführen. Mit dem flachen Design (155 mm Höhe, 222 mm Grundplattendurchmesser) und einer Nutzlast und Tragfähigkeit von bis zu 10 kg lässt sich der Hexapod nahtlos in bestehende Produktionslinien integrieren und ermöglicht gleichzeitig eine zuverlässige Positionierung und konstante Leistung in verschiedenen Ausrichtungen. Der Industrie-Hexapod erreicht Geschwindigkeiten von bis zu 20 mm/s und überzeugt durch hohe Präzision: kleinste Schrittweiten von 0,05 µm und Wiederholgenauigkeiten von bis zu ±0,05 µm. Die maximalen Stellwege betragen ±20 mm in den linearen Achsen und ±16° in den rotatorischen Achsen. Der H-815 bietet dank integrierter Bremsen maximale Sicherheit und höchste Robustheit im kompakten Bauraum. Durch den absoluten Encoder ist eine sofortige Einsatzbereitschaft ohne Referenzierungsfahrt möglich, wodurch Effizienz und Prozesssicherheit bei hoher Positionsgenauigkeit gesteigert werden können.
| Bewegen | H-815.D6A3 | Toleranz |
|---|---|---|
| Aktive Achsen | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
| Stellweg in X | ± 20 mm | |
| Stellweg in Y | ± 20 mm | |
| Stellweg in Z | ± 10 mm | |
| Rotationsbereich in θX | ± 9 ° | |
| Rotationsbereich in θY | ± 9 ° | |
| Rotationsbereich in θZ | ± 16 ° | |
| Maximale Geschwindigkeit in X | 20 mm/s | |
| Empfohlene Geschwindigkeit in X | 15 mm/s | |
| Maximale Geschwindigkeit in Y | 20 mm/s | |
| Empfohlene Geschwindigkeit in Y | 15 mm/s | |
| Maximale Geschwindigkeit in Z | 20 mm/s | |
| Empfohlene Geschwindigkeit in Z | 15 mm/s | |
| Maximale Winkelgeschwindigkeit in θX | 340 mrad/s | |
| Empfohlene Winkelgeschwindigkeit in θX | 170 mrad/s | |
| Maximale Winkelgeschwindigkeit in θY | 340 mrad/s | |
| Empfohlene Winkelgeschwindigkeit in θY | 170 mrad/s | |
| Maximale Winkelgeschwindigkeit in θZ | 680 mrad/s | |
| Empfohlene Winkelgeschwindigkeit in θZ | 340 mrad/s | |
| Amplitude-Frequenz-Produkt in X | 9 mm·Hz | |
| Amplitude-Frequenz-Produkt in Y | 8 mm·Hz | |
| Amplitude-Frequenz-Produkt in Z | 3,4 mm·Hz | |
| Amplitude-Frequenz-Produkt in θX | 3 °·Hz | |
| Amplitude-Frequenz-Produkt in θY | 3 °·Hz | |
| Amplitude-Frequenz-Produkt in θZ | 6,9 °·Hz | |
| Amplitude-Frequenz²-Produkt in X | 91,2 mm·Hz² | |
| Amplitude-Frequenz²-Produkt in Y | 91,2 mm·Hz² | |
| Amplitude-Frequenz²-Produkt in Z | 445,8 mm·Hz² | |
| Amplitude-Frequenz²-Produkt in θX | 725,6 °·Hz² | |
| Amplitude-Frequenz²-Produkt in θY | 335 °·Hz² | |
| Amplitude-Frequenz²-Produkt in θZ | 136,4 °·Hz² | |
| Amplitudenfehler | 5 % | max. |
| Maximale Frequenz | 30 Hz | |
| Positionieren | H-815.D6A3 | Toleranz |
| Kleinste Schrittweite in X | 0,08 µm | typ. |
| Kleinste Schrittweite in Y | 0,08 µm | typ. |
| Kleinste Schrittweite in Z | 0,05 µm | typ. |
| Kleinste Schrittweite in θX | 1 µrad | typ. |
| Kleinste Schrittweite in θY | 1 µrad | typ. |
| Kleinste Schrittweite in θZ | 0,7 µrad | typ. |
| Unidirektionale Wiederholgenauigkeit in X | ± 0,09 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in Y | ± 0,09 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in Z | ± 0,05 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in θX | ± 1 µrad | typ. |
| Unidirektionale Wiederholgenauigkeit in θY | ± 1 µrad | typ. |
| Unidirektionale Wiederholgenauigkeit in θZ | ± 0,7 µrad | typ. |
| Umkehrspiel in X | 2 µm | typ. |
| Umkehrspiel in Y | 2 µm | typ. |
| Umkehrspiel in Z | 0,1 µm | typ. |
| Umkehrspiel in θX | 1,6 µrad | typ. |
| Umkehrspiel in θY | 1,6 µrad | typ. |
| Umkehrspiel in θZ | 26,1 µrad | typ. |
| Integrierter Sensor | Absoluter Rotationsencoder, Multiturn | |
| Antriebseigenschaften | H-815.D6A3 | Toleranz |
| Antriebstyp | Bürstenloser DC-Motor | |
| Nennspannung | 24 V | |
| Mechanische Eigenschaften | H-815.D6A3 | Toleranz |
| Steifigkeit in X | 0,7 N/µm | |
| Steifigkeit in Y | 0,7 N/µm | |
| Steifigkeit in Z | 8 N/µm | |
| Maximale Nutzlast, Grundplatte horizontal | 10 kg | |
| Maximale Nutzlast, Grundplatte in beliebiger Ausrichtung | 4 kg | |
| Maximale Haltekraft, passiv, Grundplatte horizontal | 100 N | |
| Maximale Haltekraft, passiv, Grundplatte in beliebiger Ausrichtung | 40 N | |
| Gesamtmasse | 5,5 kg | |
| Material | Aluminium; Edelstahl | |
| Höhe | 155 mm | |
| Durchmesser Grundplatte | 222 mm | |
| Anschlüsse und Umgebung | H-815.D6A3 | Toleranz |
| Betriebstemperaturbereich | 0 bis 50 °C | |
| Antriebsanschluss | 6 × Push-Pull-Rundsteckverbinder 16-polig (w) | |
| Empfohlene Controller/Treiber | C-887.4x, C-887.3x |
Hexapod für industrielle 24/7-Anwendungen mit höchsten Präzisionsanforderungen
Technical Note für das Auspacken des Hexapods
Hexapod-Systeme: Hexapod H-815 mit Controller C-887.3x/.4x mit integrierten Treibern für BLDCMotoren
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Hexapod für industrielle Präzisionsanwendungen; BLDC-Motor; 10 kg Nutzlast; 20 mm/s maximale Geschwindigkeit; absolut messender Encoder. Anschlusskabel sind nicht im Lieferumfang enthalten und müssen separat bestellt werden.
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.

