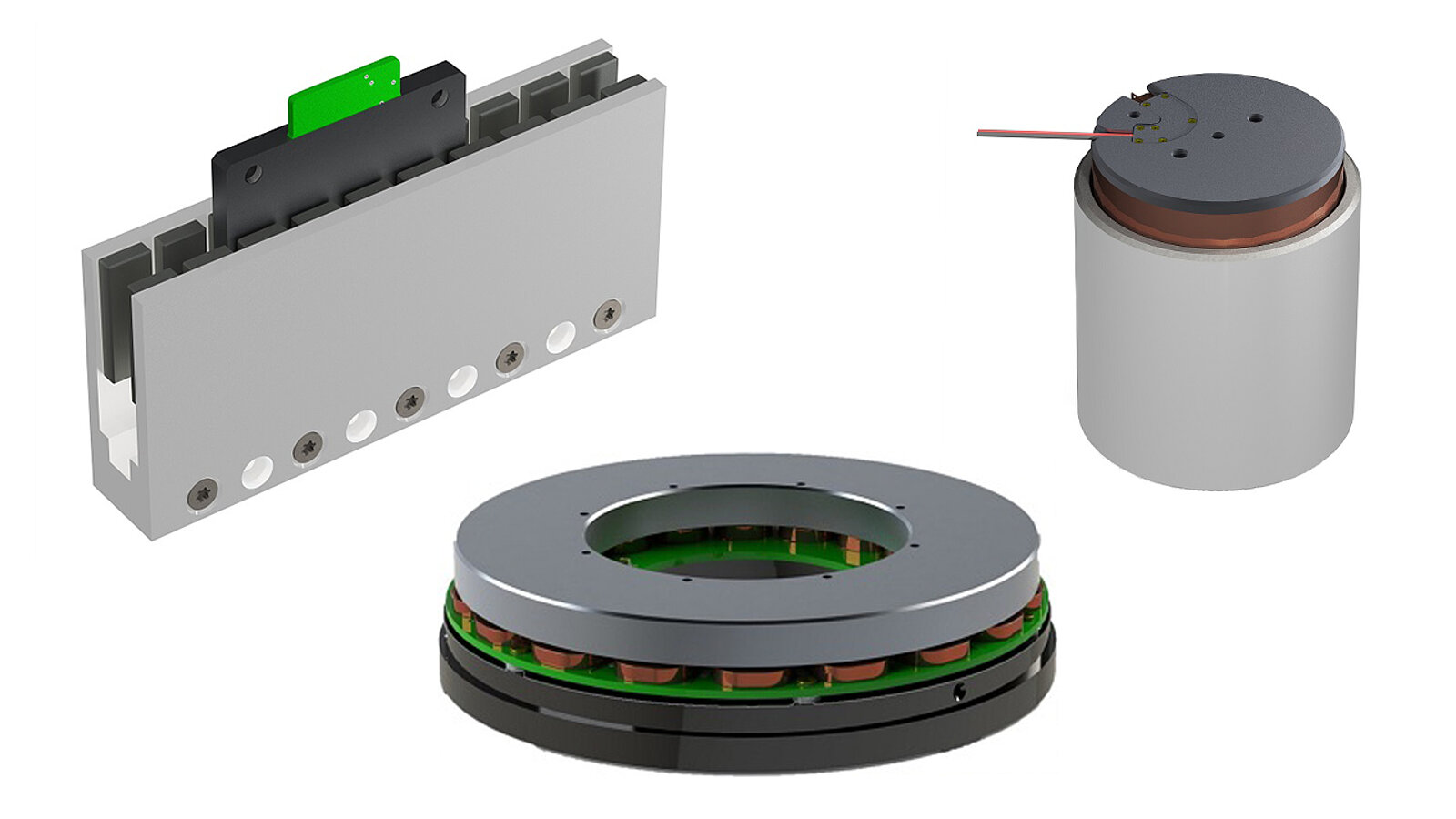
Antriebe wie Voice-Coil-, Linear- und Torquemotoren sind elektromagnetische Direktantriebe. Bei Direktantrieben wird die Kraft des Antriebselements ohne mechanische Übertragungselemente wie Kupplung, Spindel oder Getriebe direkt auf die zu bewegende Last, z.B. auf einen Linear- oder Drehtisch übertragen. Elektromagnetische Direktantriebe bestehen aus einem Wicklungskörper (Spule), in dem sich bei Stromdurchfluss ein magnetisches Feld bildet, und einem Träger bzw. der Magnetbaugruppe, auf der die Magnete befestigt sind.
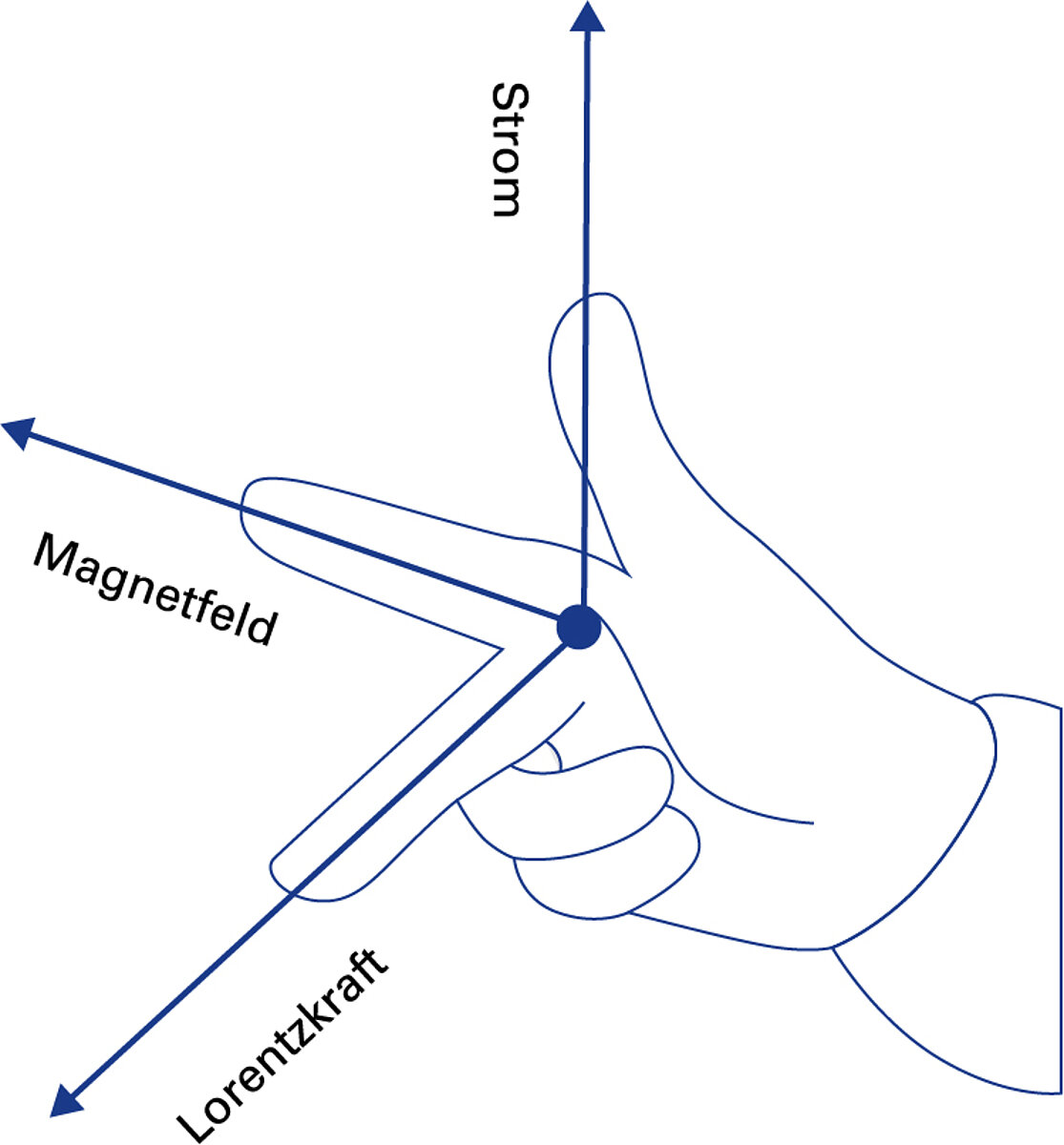
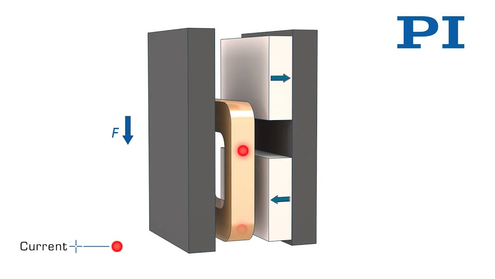
Die Kraft bzw. das Drehmoment für die Beschleunigung der Last entsteht durch die Lorentzkraft. Sie ist proportional zur Magnetfeldstärke und zum Strom des stromdurchflossenen Leiters. Die elektrische Energie wird dabei in mechanische Energie umgewandelt. Je nach Stromrichtung wirkt die dabei erzeugte Kraft bidirektional. Prinzipiell können entweder der Wicklungskörper (“Moving Coil”) oder die Magnetbaugruppe (“Moving Magnet”) bewegt werden. Der bewegte Teil wird als Sekundärteil, der statische Teil als Primärteil bezeichnet.
PI bietet zahlreiche Standardprodukte und kundenspezifische Positionierlösungen, die mit magnetischen Direktantrieben ausgestattet sind und verfügt über langjährige Erfahrung bei der Auslegung, Konstruktion und Fertigung der dafür notwendigen Systemkomponenten wie Führungen, Sensoren, Steuerungs- und Regeltechnik und Software. Darüber hinaus entwickelt PI magnetische Motoren selbst, wenn Positioniersysteme Leistungsmerkmale erreichen sollen, die mit am Markt verfügbaren Antriebskomponenten nicht möglich sind, z.B. um eine hohe Kraftdichte oder kompakte Bauweise zu erzielen. Die eigenentwickelten Motoren sind mit dem Markennamen PIMag® gekennzeichnet, Positioniersysteme mit PI Motoren mit Driven by PIMag®.
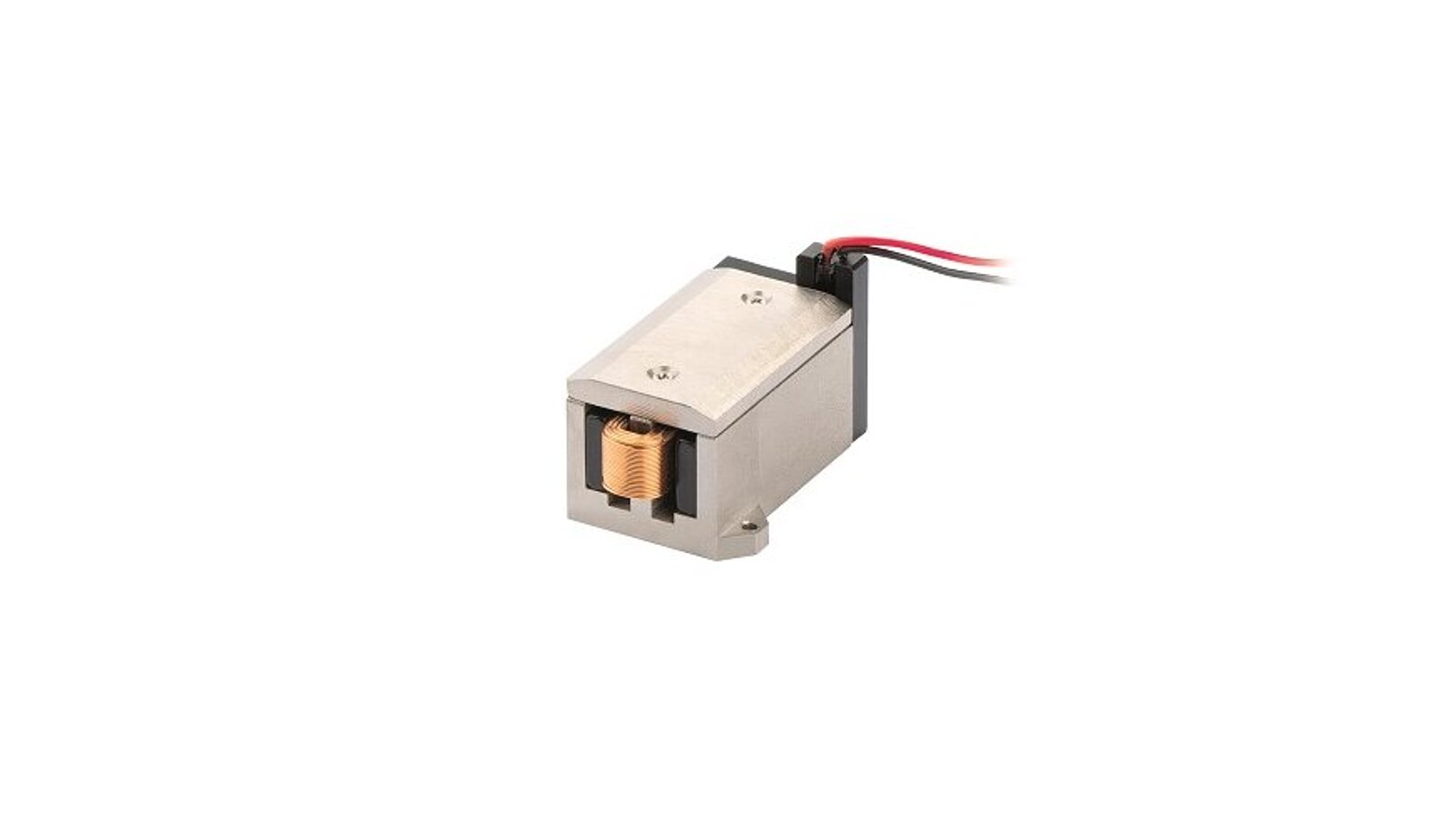
Voice-Coil-Antriebe sind einphasige Motoren und bestehen aus einem Dauermagneten und einem Wicklungskörper, die sich im Luftspalt des Magnetfeldes befinden. Fließt ein Strom durch den Wicklungskörper, so bewegt sich der Wicklungskörper im Magnetfeld des Dauermagneten. Rechteckig oder flach gebaut, können besonders kompakte Abmessungen erzielt werden.
Zylindrische Voice-Coils sind nach dem Tauchspulenprinzip aufgebaut, d.h. die Spule sitzt in einem magnetischen Topf. Dabei kann entweder der Wicklungskörper oder der Topf bewegt werden. Bei zylindrischen Voice-Coil-Motoren können durch den Aufbau im so genannten Multi-Coil-Prinzip die Motorkonstante bei kompaktem Bauraum optimiert und z.B. auch Lösungen mit Hohlwelle realisiert werden. Voice-Coil-Antriebe eignen sich für Scananwendungen, die hohe Präzision, hohe Dynamik und hohe Geschwindigkeiten bei Stellwegen bis zu einigen zehn Millimetern erfordern.
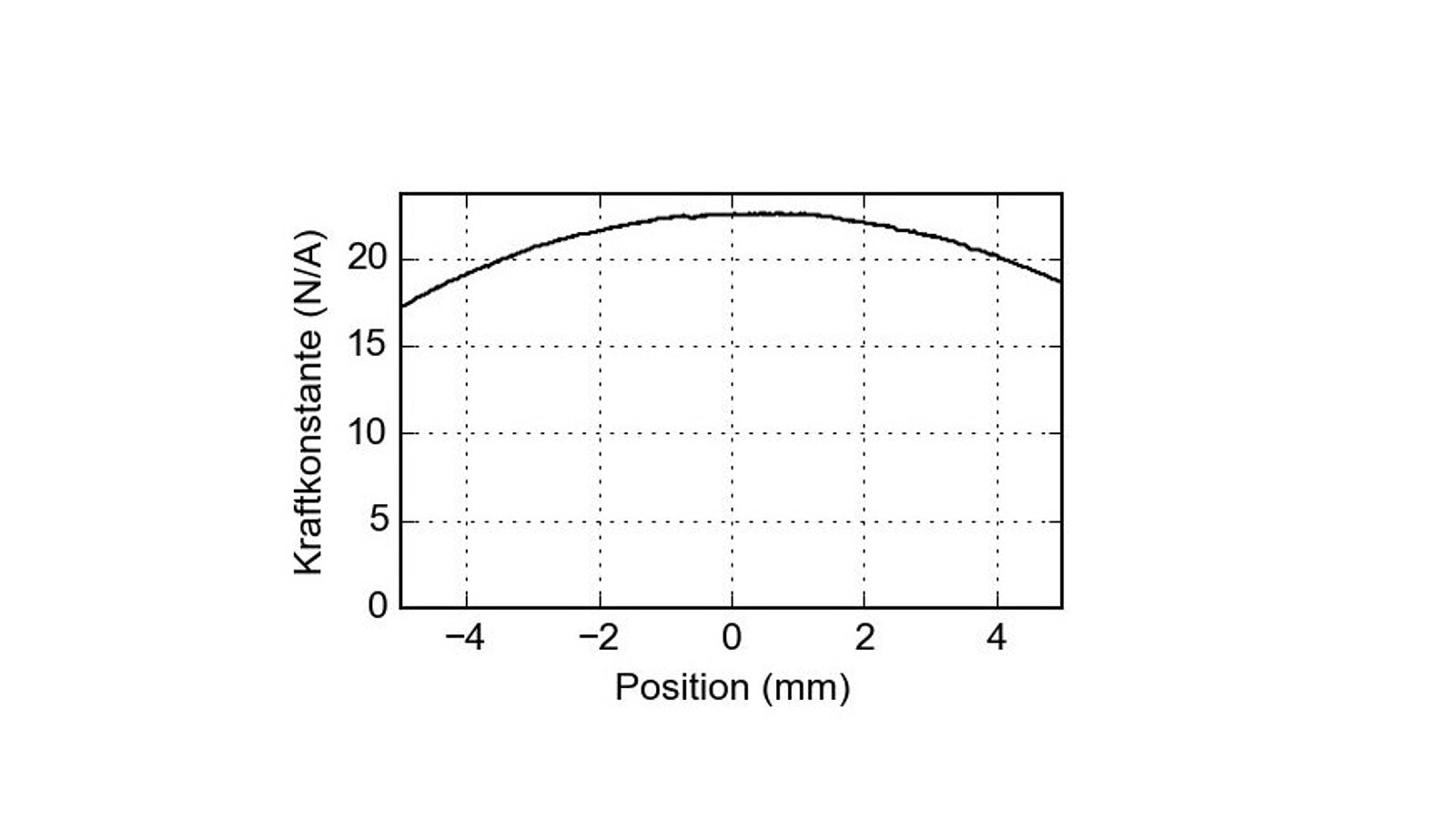
Voice-Coils können auch auf Kraft bzw. Motorkonstante optimiert werden. Die Motorkonstante bezeichnet das Verhältnis aus Kraft und Verlustleistung. Je höher die Motorkonstante, desto weniger Wärme entsteht bei der Erzeugung einer bestimmten Kraft. Sie beschreibt die Effizienz des Motors hinsichtlich der Umwandlung von elektrischer Energie in Bewegungsenergie. Mit steigender Temperatur nehmen der Wicklungswiderstand und damit auch die Verlustleistung zu, weshalb die Motorkonstante temperaturabhängig ist.
Die Kraft ist abhängig von der Position, da sich die Spulen in Relation zu den Permanentmagneten über den Stellweg verschieben. Um die Kraft möglichst schnell in den Motor zu treiben, kann die Spannung erhöht werden, da der Strom dann entsprechend schneller zur Verfügung gestellt wird. Im gleichen Verhältnis nimmt die Beschleunigung zu. Durch einen schnellen Beschleunigungsanstieg (Ruck) können somit hochdynamische Anwendungen realisiert werden. Zylindrische Motoren werden beispielsweise in Positionierlösungen für Fokussieraufgaben eingesetzt, um einen Messkopf oder eine Optik dynamisch in der Vertikalen zu bewegen oder in Endoskopen.

Linearmotoren

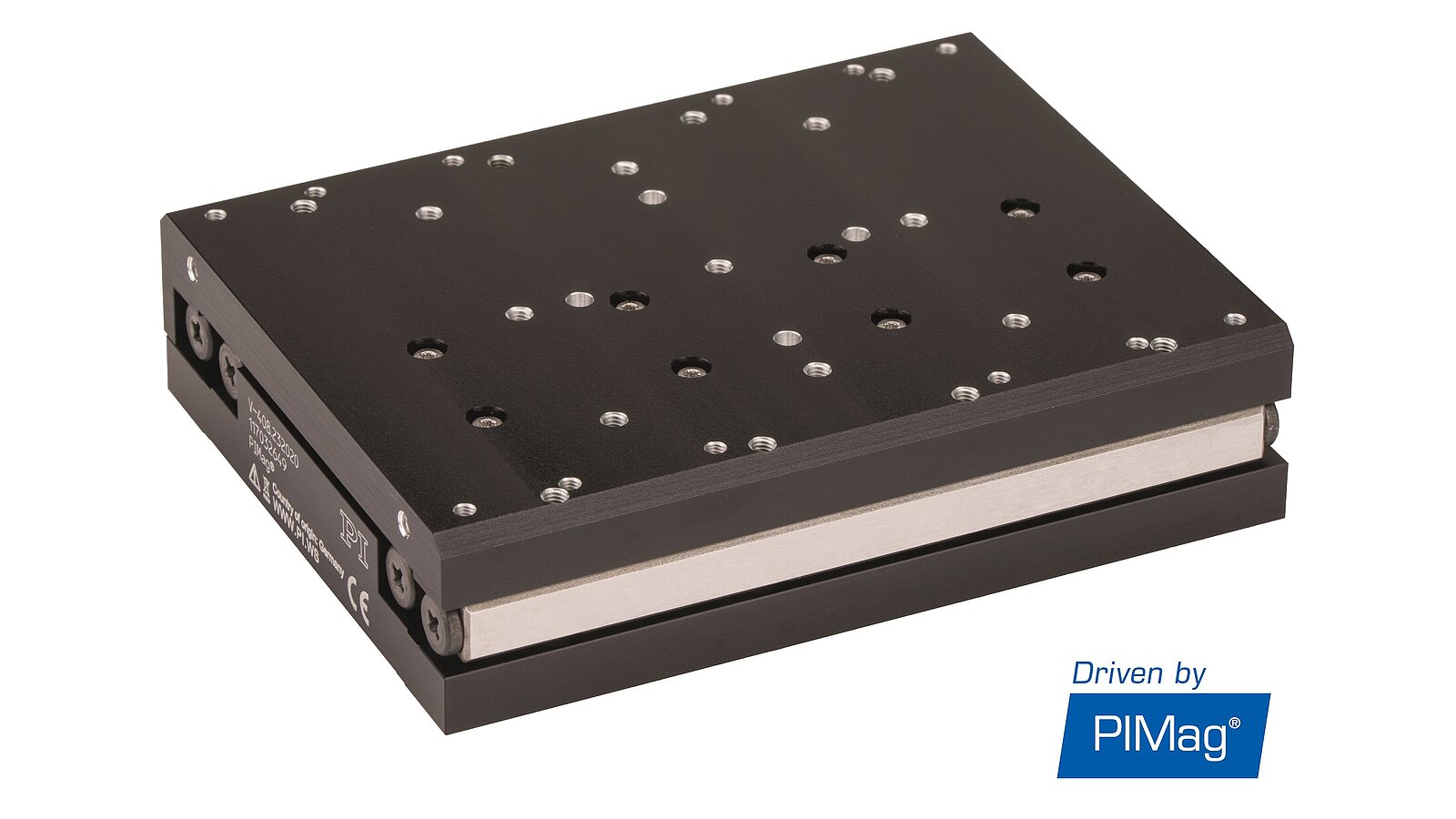
Ein klassischer 3-Phasen-Linearmotor ist im Prinzip eine Aneinanderreihung von mindestens drei (oder einem Vielfachen von drei) Voice-Coil-Motoren. Die einzelnen Spulen können nach positionsabhängigem, festgelegtem Muster angesteuert, d.h. kommutiert, werden. Linearmotoren werden sowohl für sehr hohe als auch für sehr geringe Vorschubgeschwindigkeiten eingesetzt. Sie arbeiten präzise in einem Bereich von unter 0,1 μm/s bis zu über 5 m/s. In Kombination mit Luft- oder Magnetlagern ist eine Positionsauflösung bis zu wenigen Nanometern erreichbar.
Optional vergießt PI Linearmotoren unter Vakuum. Dies führt zu einer verbesserten Wärmeabfuhr, wodurch höhere Nennkräfte erreicht werden. Außerdem sorgt die Vergussmasse für eine Kapselung des Motors, womit er vor Beschädigung von außen z. B. bei der Montage geschützt ist. Für Anwendungen, die hohe Geschwindigkeiten oder schnelle Stromanstiegszeiten benötigen, kann PI Motoren für Betriebsspannungen bis 600 VDC auslegen.
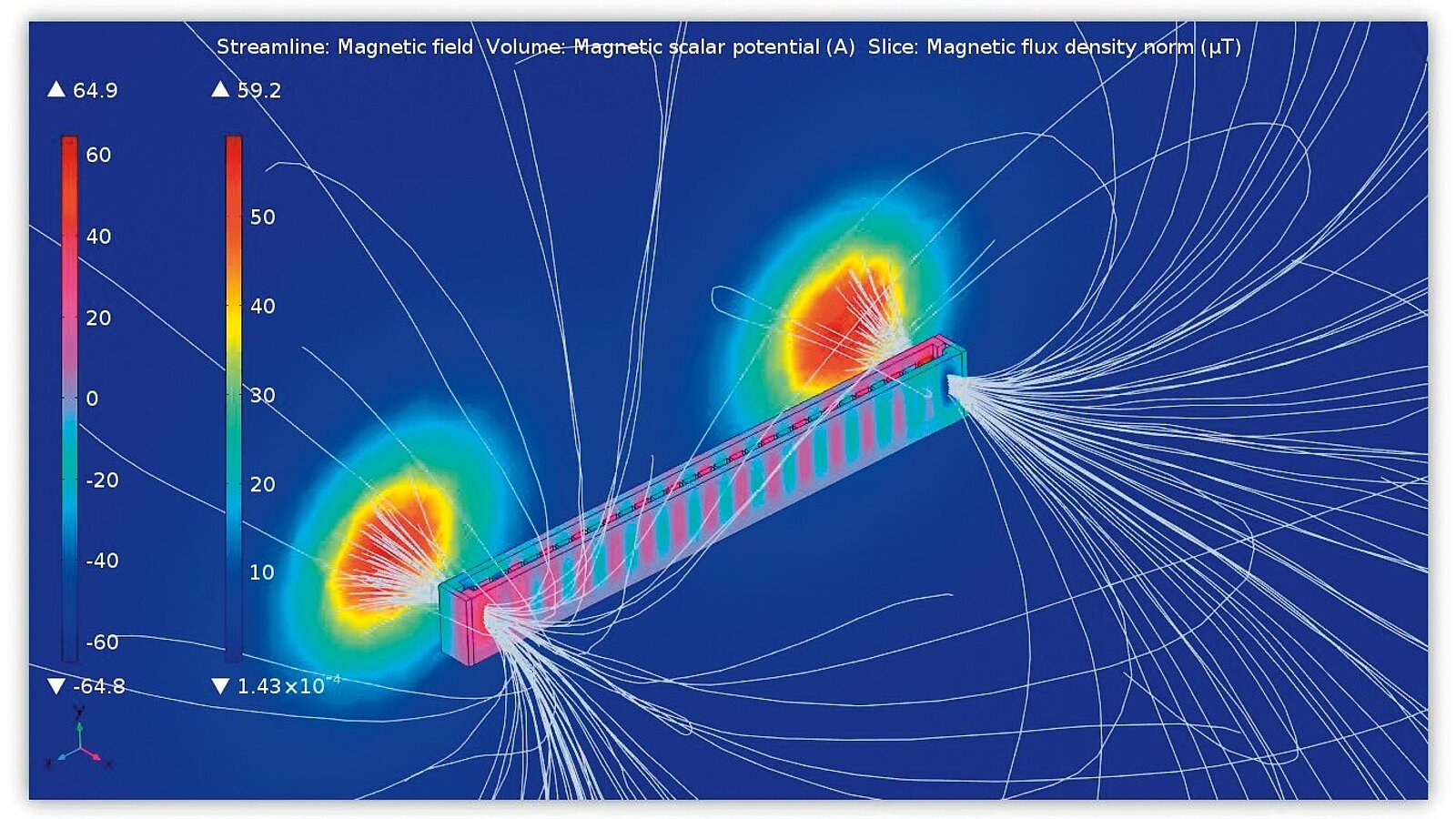
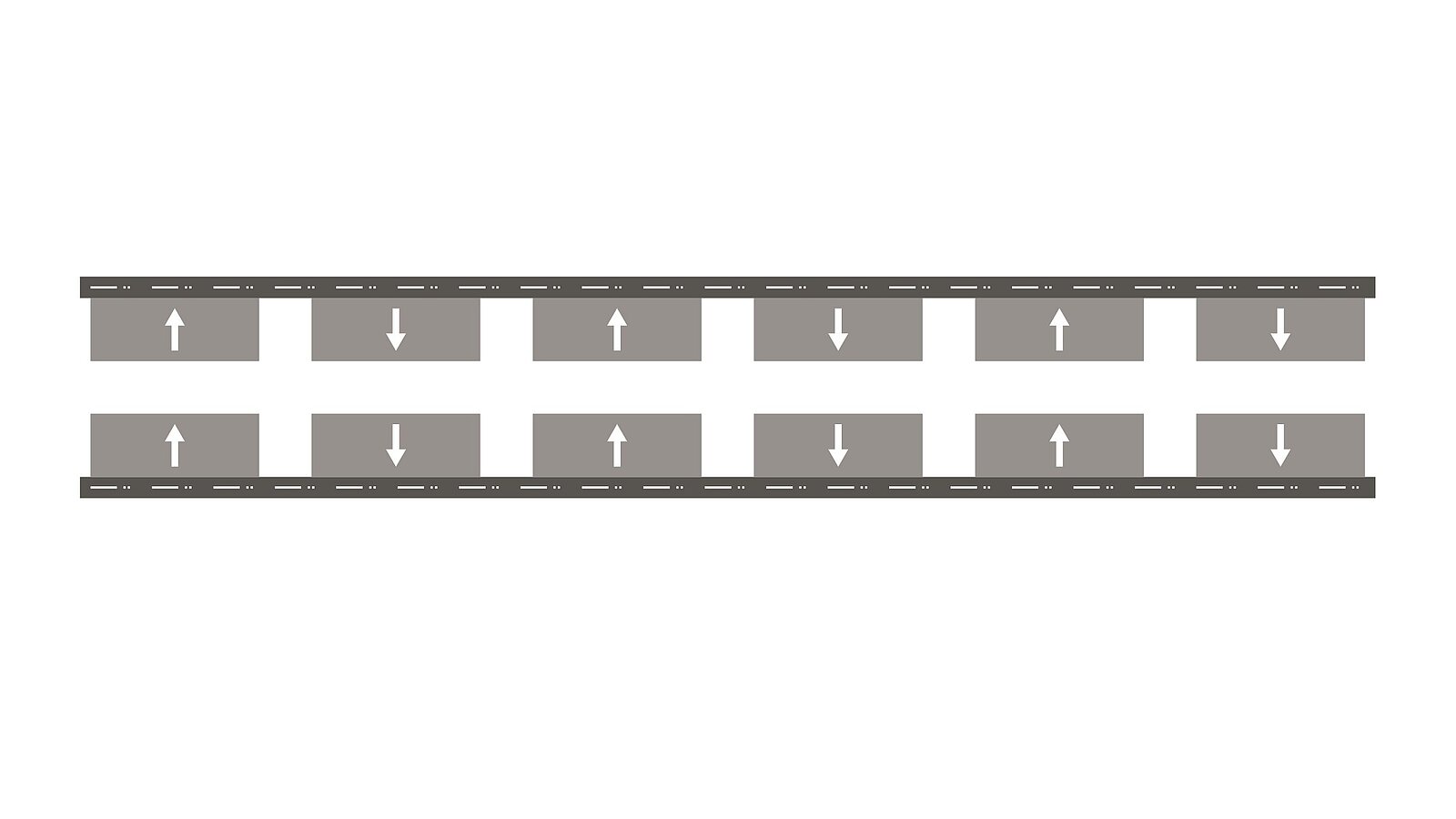
Die bei PI Linearmotoren eingesetzten Magnetbahnen können in unterschiedlichen Längen gefertigt und modular aneinander gereiht werden, um beliebig lange Stellwege zu realisieren. Zur Auswahl stehen einseitige Magnetbahnen und Magnetbahnen mit U-Profil.
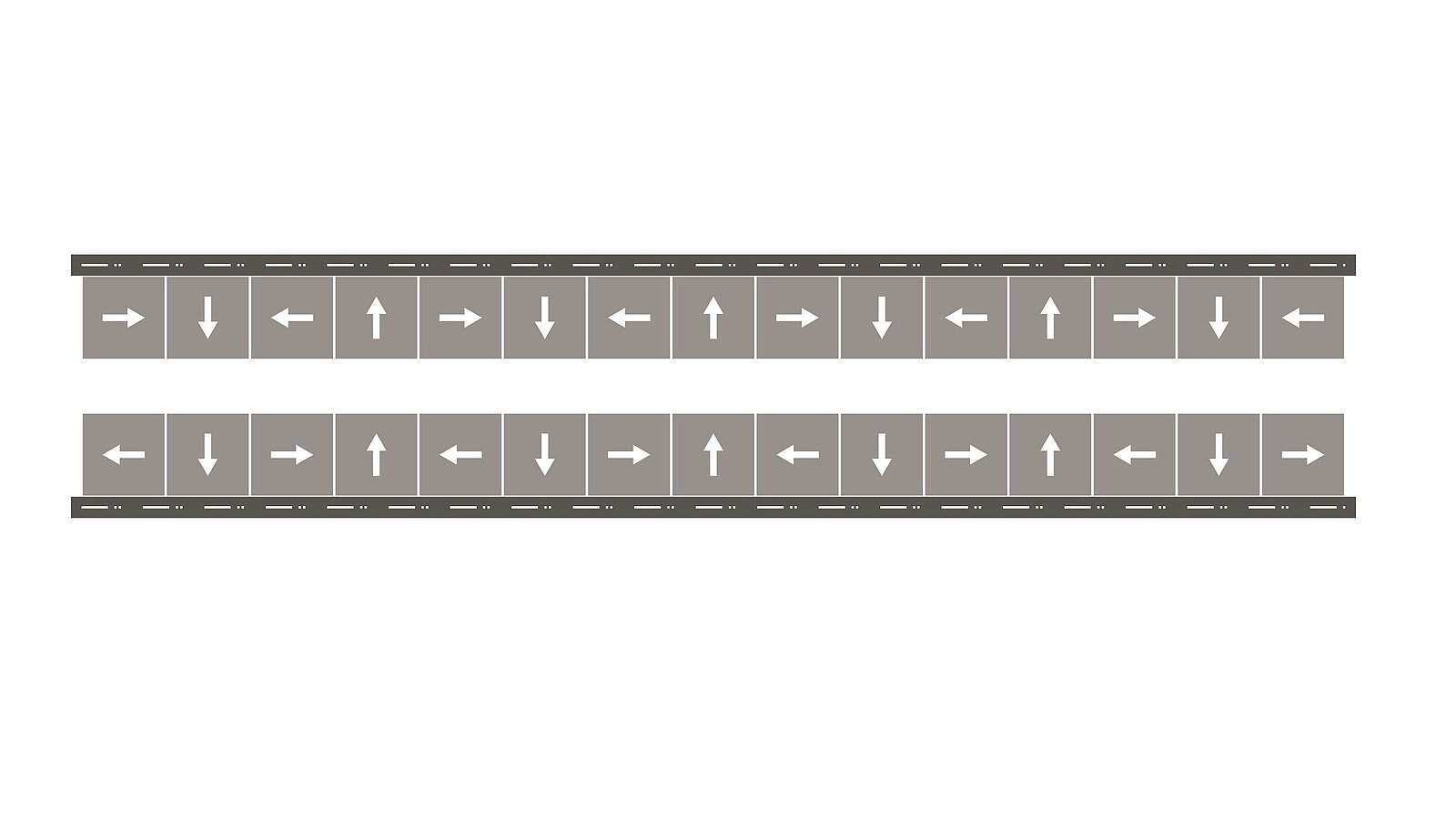
Magnetbahnen mit U-Profil erreichen gegenüber einseitigen Magnetbahnen höhere Magnetfeldstärken und dadurch höhere Kräfte. Werden die Magnete darüber hinaus als Halbach-Array angeordnet, kann die Magnetfeldstärke gegenüber einer Nordpol-Südpol-Anordnung etwa um 10% gesteigert werden. Zudem kann bei einem Halbach-Array der Eisenrückschluss entfallen, wodurch diese Magnetbahnen deutlich leichter werden. Diese Vorteile gelten auch bei einer einseitigen Magnetbahn. Hierbei werden durch die Verwendung von Halbach-Arrays außerdem rückseitige Streufelder minimiert. Für Anwendungen, die besonders leichte Magnetbahnen erfordern, bietet PI Karbonträger.
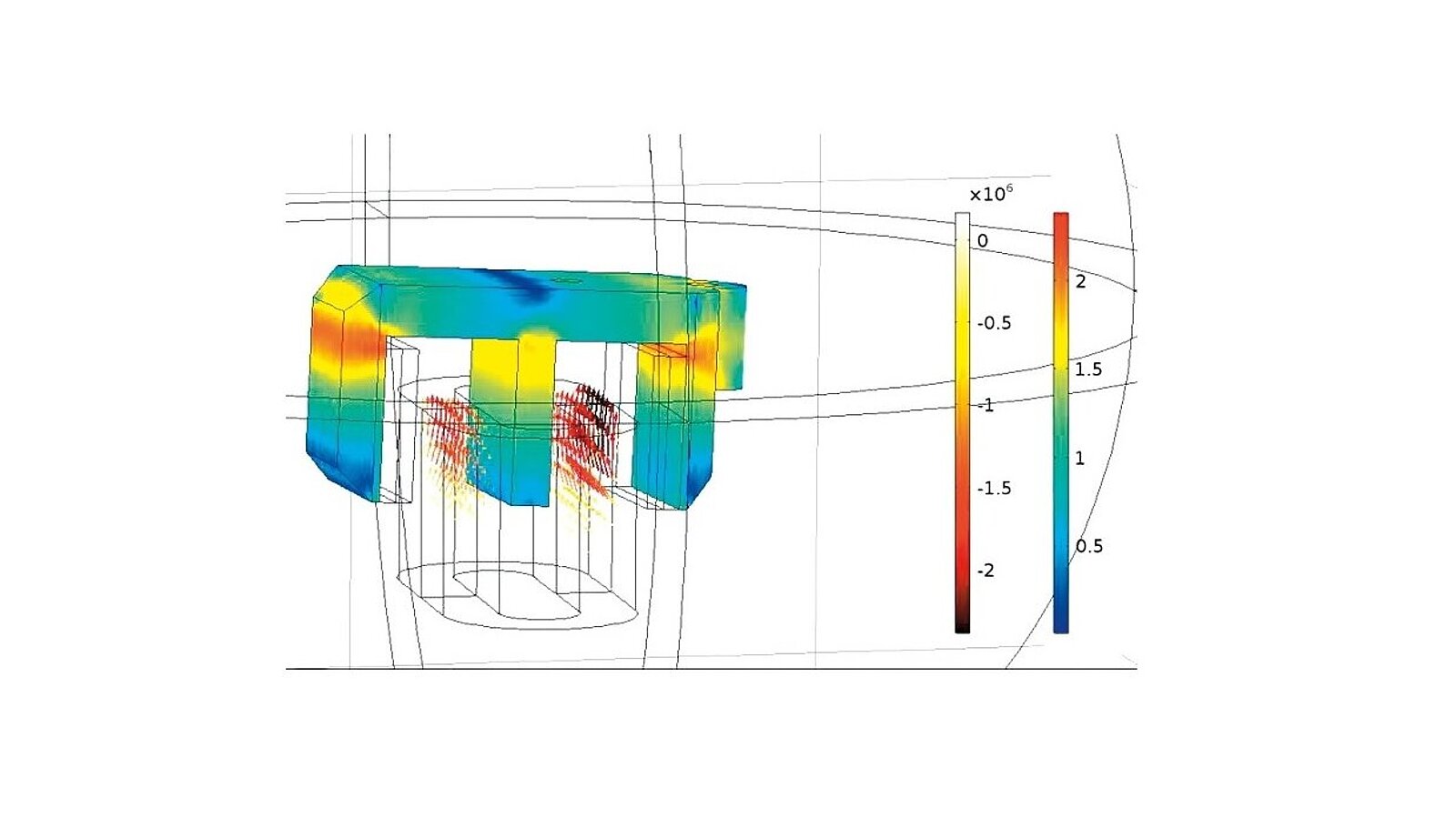
Bei eisenbehafteten Motoren besteht der Kern der Spuleneinheit aus Eisen. Das Eisen maximiert die magnetischen Kräfte und trägt zu einer hohen Kraftdichte und thermischen Stabilität bei. Um Wirbelstromverluste zu reduzieren, wird das Eisen laminiert und zumeist aus gestapelten und isolierten Trafoblechen aufgebaut.
Durch das Eisen in der Spuleneinheit entstehen Anziehungskräfte zwischen Spuleneinheit und Magnetbaugruppe, was zum Auftreten von Rastkräften führt (Cogging) und damit zu einer Schwankung der Vorschubkraft über den Stellweg. Speziell vorgesehene Randzähne sorgen für eine Optimierung dieser Rastkräfte. Eisenbehaftete Linearmotoren eigenen sich für Anwendungen mit hohen Kräften und Beschleunigungen bei limitiertem Bauraum.
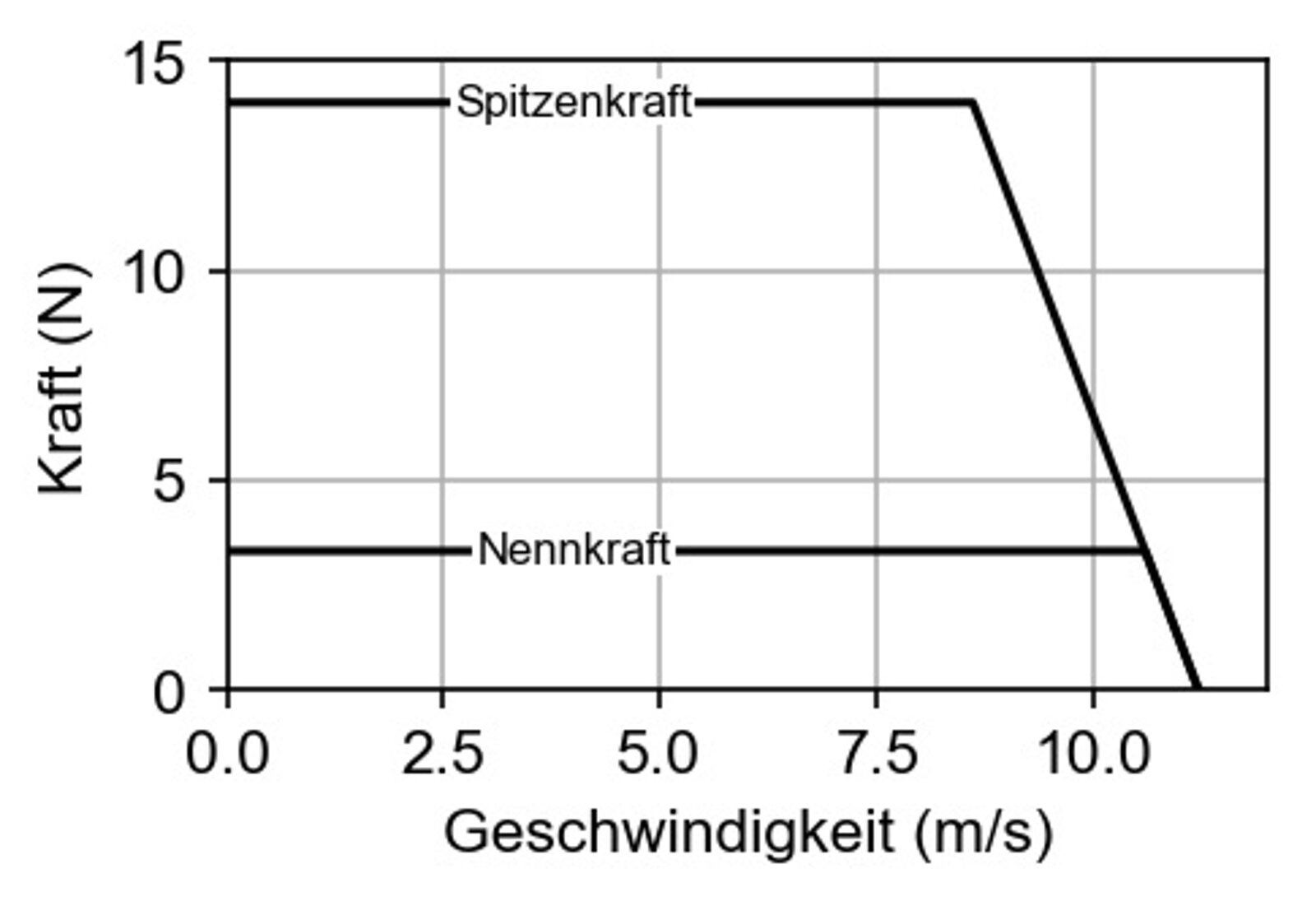
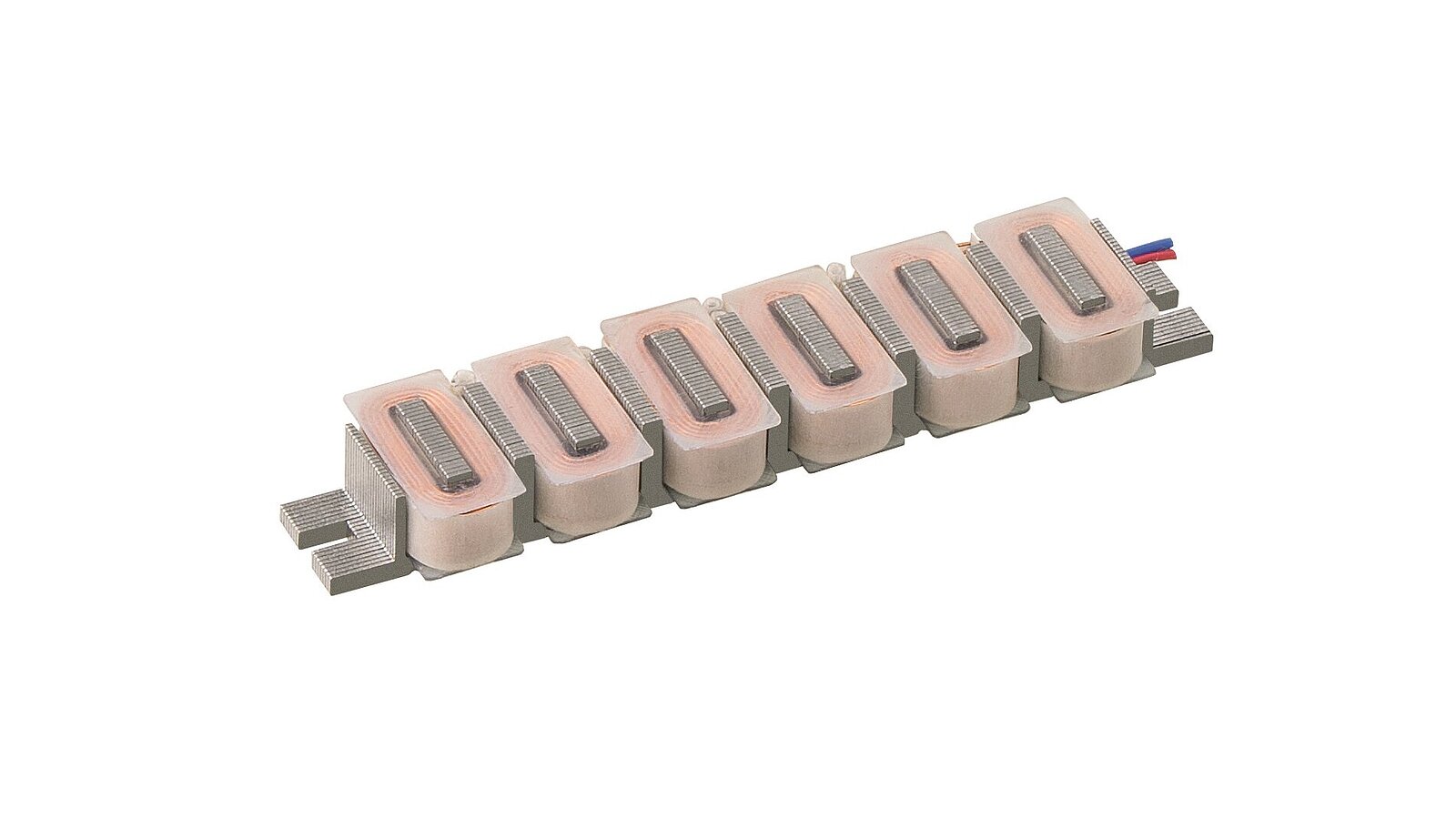

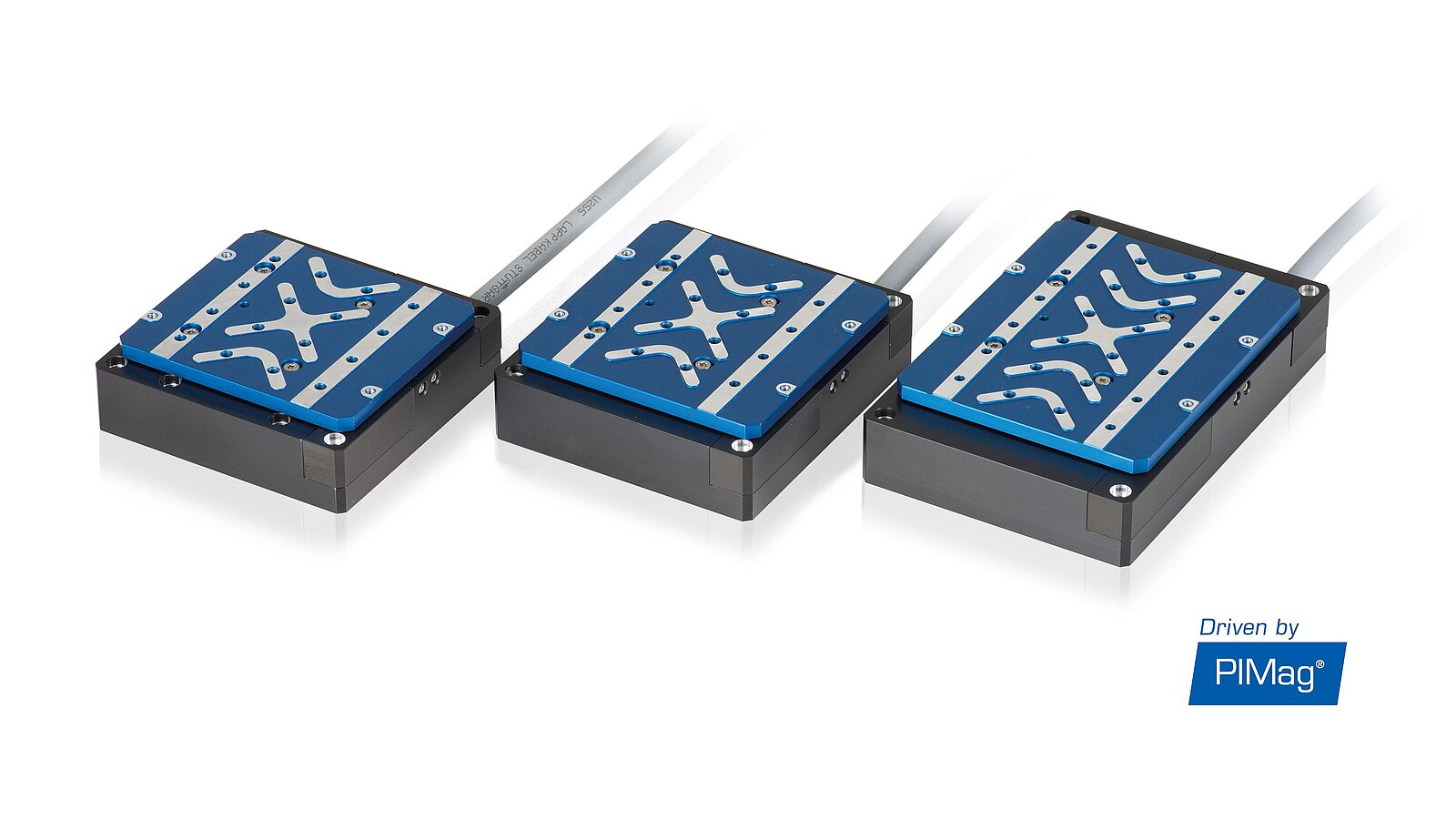
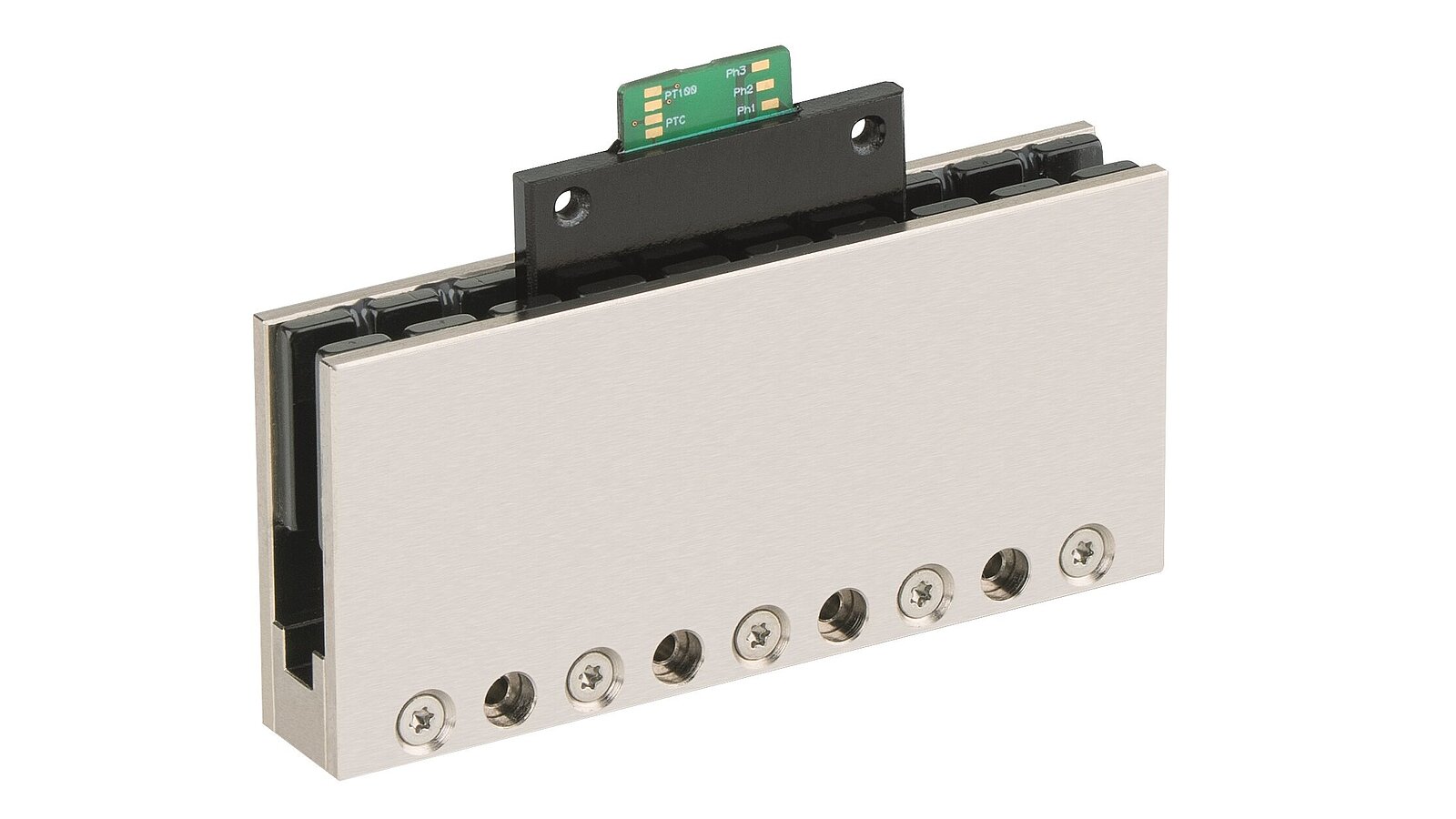
Der Wicklungskörper der eisenlosen Linearmotoren hat keinen Eisenkern. Dadurch entstehen keine Anziehungskräfte zwischen Spule und Magnetbaugruppe und auch keine Rastkräfte. Durch den fehlenden Eisenkern reduziert sich auch das Eigengewicht des Motors. Da es keine Rastkräfte gibt, die sich auf Führungen und Vorschubgeschwindigkeit auswirken und der Wicklungskörper leichter ist, zeichnen sich eisenlose Motoren durch hohe Ablaufgenauigkeit, hohe Geschwindigkeitsstabilität und hohe Beschleunigungen aus. Kraft und Dynamik können über die Anzahl oder über die Baugröße ausgelegt werden. Eisenlose Motoren erreichen im Vergleich zu eisenbehafteten Motoren in den meisten Fällen geringere Nenn- und Spitzenkräfte. Das begründet sich im Design aufgrund fehlender, thermisch leitfähiger Metalle und der damit eingeschränkteren Wärmeabfuhr aus den Spulen. Zusätzliche Temperatursensoren sorgen daher für einen Überlastschutz der Motoren.
Eisenlose Linearmotoren eigenen sich für Anwendungen mit den höchsten Präzisionsansprüchen bei gleichzeitig hoher Dynamik und kompaktem Bauraum.


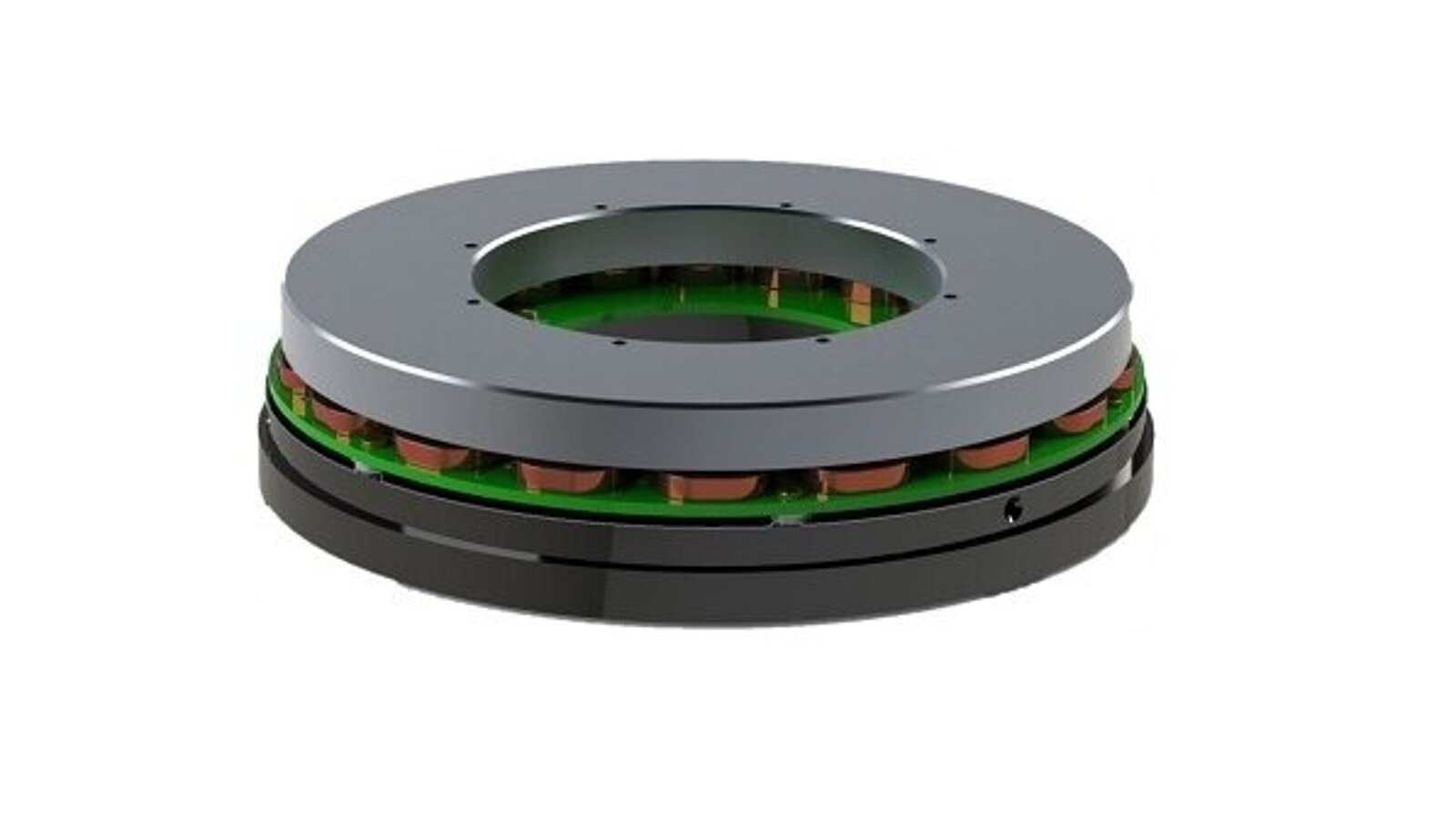
Ein Torquemotor entspricht im Prinzip einem radial ausgeführten Linearmotor. Der Stator des Torquemotors enthält beispielsweise Spulen und wird fest montiert; der Rotor enthält die Magnetbaugruppe. Das Drehmoment skaliert quadratisch mit dem Durchmesser, während die Magnetlänge linear skaliert. Damit werden auf großem Durchmesser große Drehmomente erzeugt. Außerdem ermöglichen große radiale Abmessungen Aperturen, um Laserstrahlen oder Kabel durchzuführen.
Aufgrund des Direktantriebsprinzips sind Torquemotoren spielfrei. Die Spielfreiheit ermöglicht eine hohe Positioniergenauigkeit und eine hohe Antriebssteifigkeit, die zu einer hohen Wiederholgenauigkeit führt. Das große Antriebsmoment lässt große Beschleunigungen zu und führt somit zu einer hohen Dynamik. Weitere Eigenschaften sind hohe Drehsteifigkeit, hohe Spitzenmomente, hoher Wirkungsgrad und hohe Laufruhe.
Aufgrund der kompakten Bauweise in Bezug auf das Drehmoment bzw. der vorliegenden Rotationssymmetrie eignet sich der Torquemotor unter anderem für Hochlastdrehtische auf Ein- oder Mehrachsaufbauten.


Positions-, Geschwindigkeits- und Kraftregelung

Aufgrund der Stromsteuerung und der linearen Abhängigkeit der Antriebskraft zum Strom, können magnetische Direktantriebe nicht nur positions- oder geschwindigkeitsgeregelt betrieben werden, sondern auch kraftgeregelt.
Die Kraftregelung ermöglicht den Betrieb mit definierter Halte- oder Vorschubkraft. Die Kraft- und Positionssensoren können einzeln ausgelesen werden oder gleichzeitig in einem Doppelregelkreis. Dadurch ergeben sich neben der reinen Kraftregelung die Optionen einer unterlagerten Positions- und Geschwindigkeitsregelung. Eine Auto-Zero-Funktion legt z.B. den Haltestrom fest, bei dem der Antrieb im ungeregelten Betrieb eine Kraft von 0 N aufbringt.
Gewichtskraftkompensation

Magnetische Direktantriebe in vertikaler Einbaulage müssen sowohl die Bewegungsplattform als auch die Last der Anwendungen gegen die Schwerkraft halten. Dies geschieht durch Gewichtskraftkompensation. Sie ist an die Last angepasst und hält die zu bewegenden Komponenten auch ohne Motorkräfte stromlos in Position. Dadurch kann die Kraft des Motors ausschließlich für die Positionieraufgabe genutzt werden. Die Gewichtskraft kann magnetisch, pneumatisch oder mechanisch kompensiert werden. Je nach geforderten Leistungsmerkmalen setzt PI unterschiedliche Verfahren ein.

















Downloads
PIMag®: Eigenentwickelte Voice-Coil-, Linear- und Torquemotoren
Individuelle Auslegung magnetischer Direktantriebe für flexible, wettbewerbsfähige und anwendungsspezifische Positionierlösungen
Drehende Elektromotoren für die Präzisionspositionierung
Ein anwendungsbezogener Vergleich unterschiedlicher Motortypen