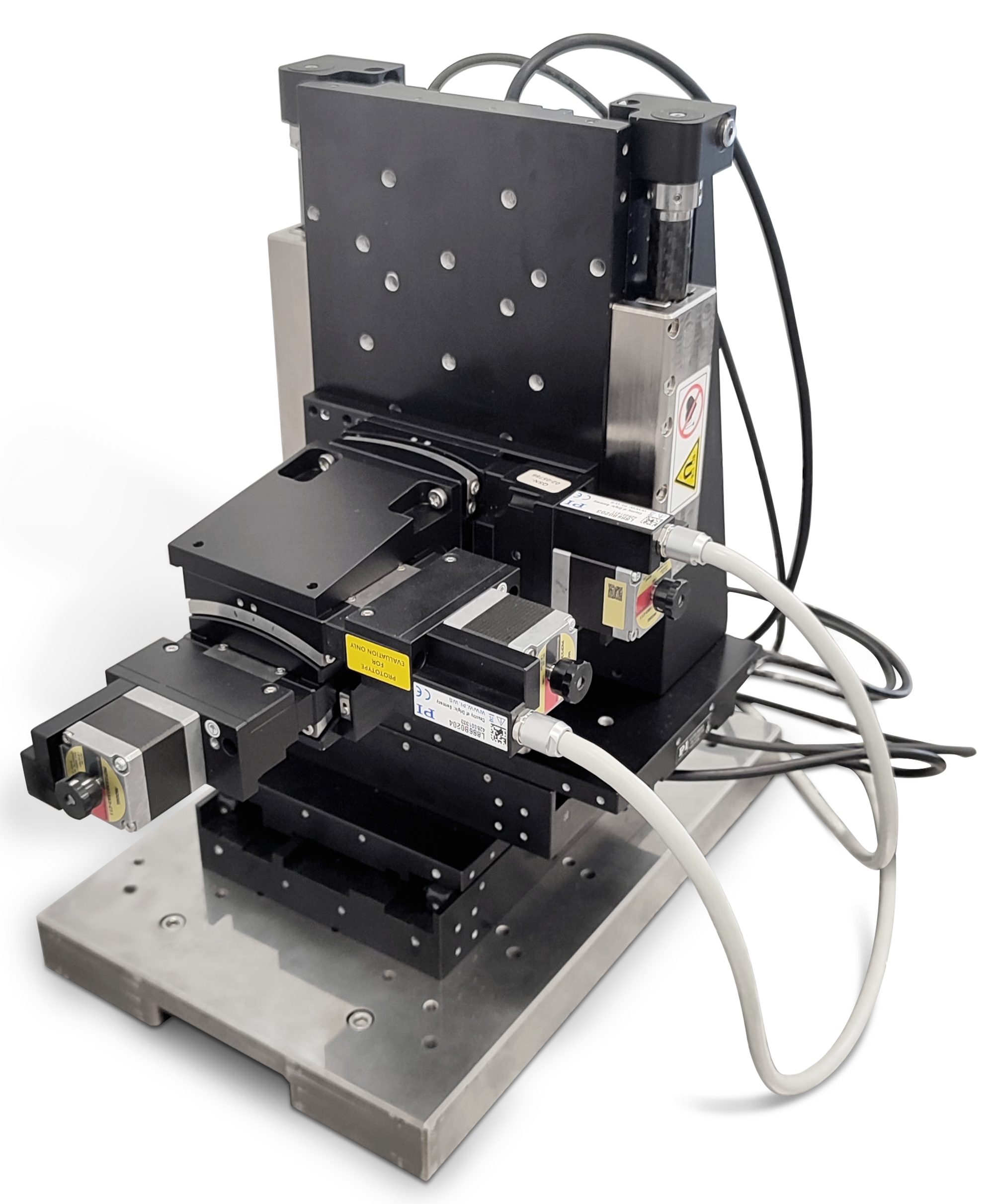
F-572.630 NEU!
Photonikausrichtungssystem mit 3 Linearachsen: X, Y, Z; 60 mm Stellweg in X, Y, Z; 500 mm/s maximale Geschwindigkeit der Linearachsen; 50 nm kleinste Schrittweite in X, Y, Z; Adapter für Rotationsachsen unten; inklusive Controller
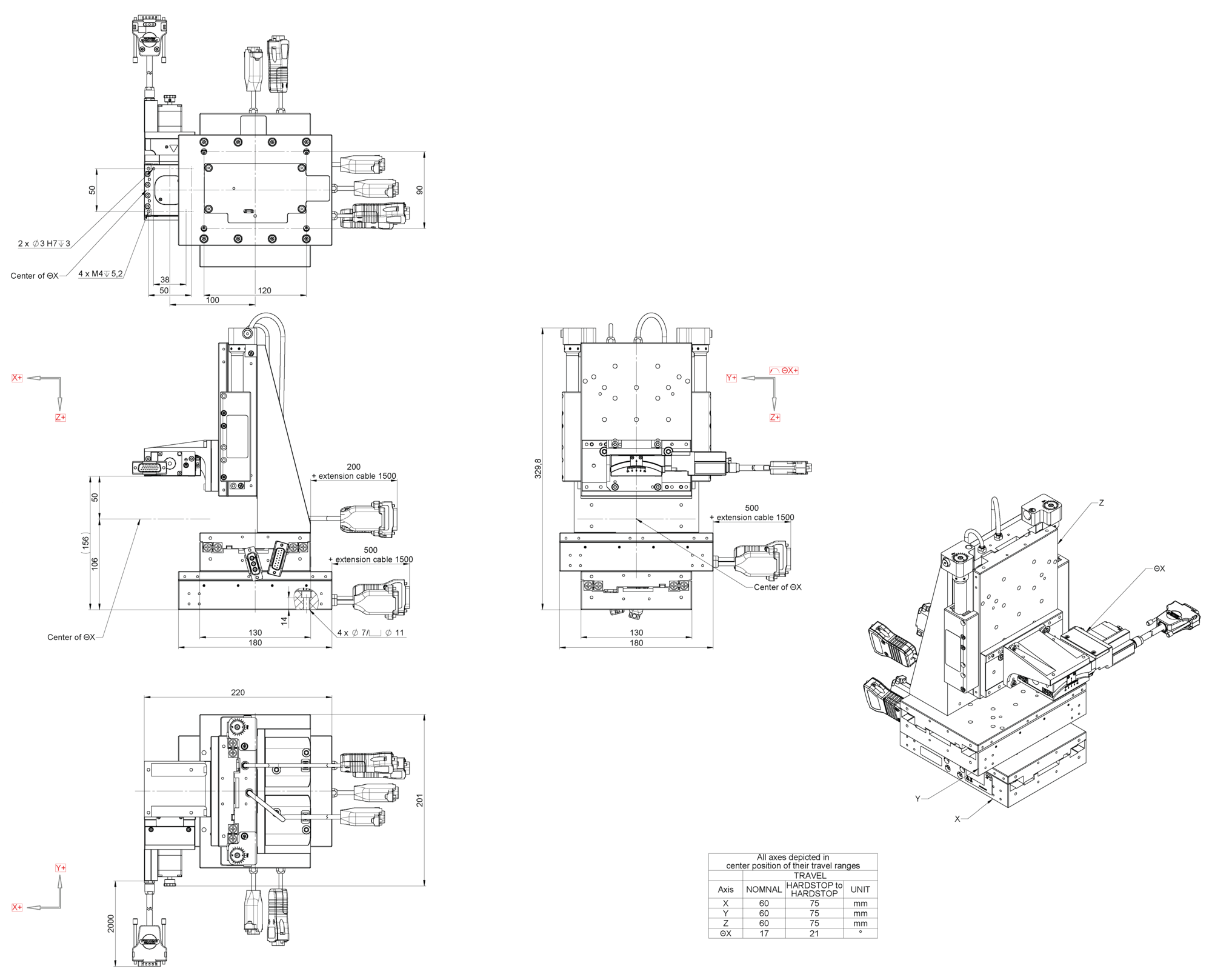
Abmessungen des F-572.64X und F-572.64XN
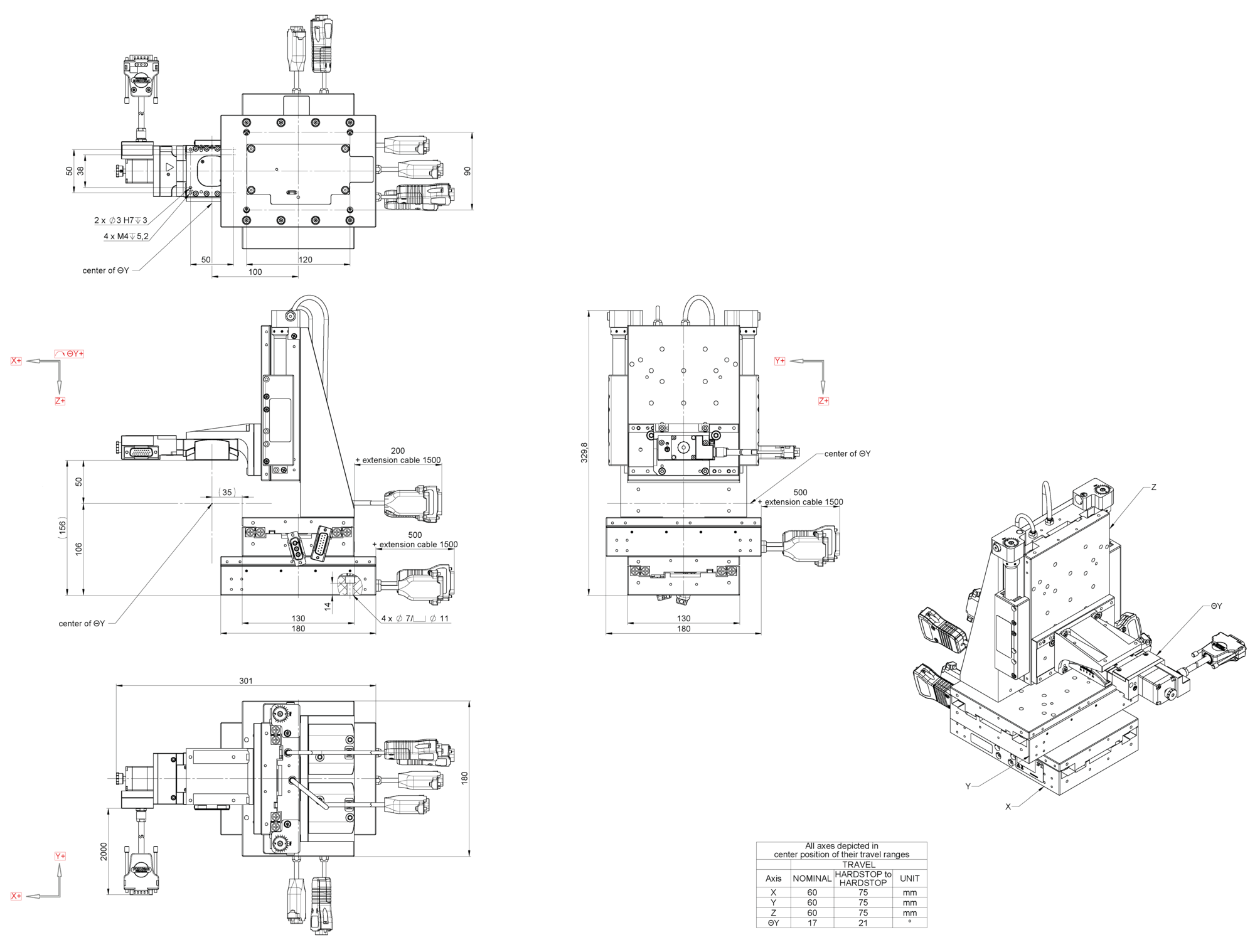
Abmessungen des F-572.64Y und F-572.64YN
Abmessungen des F-572.74X und F-572.74XN
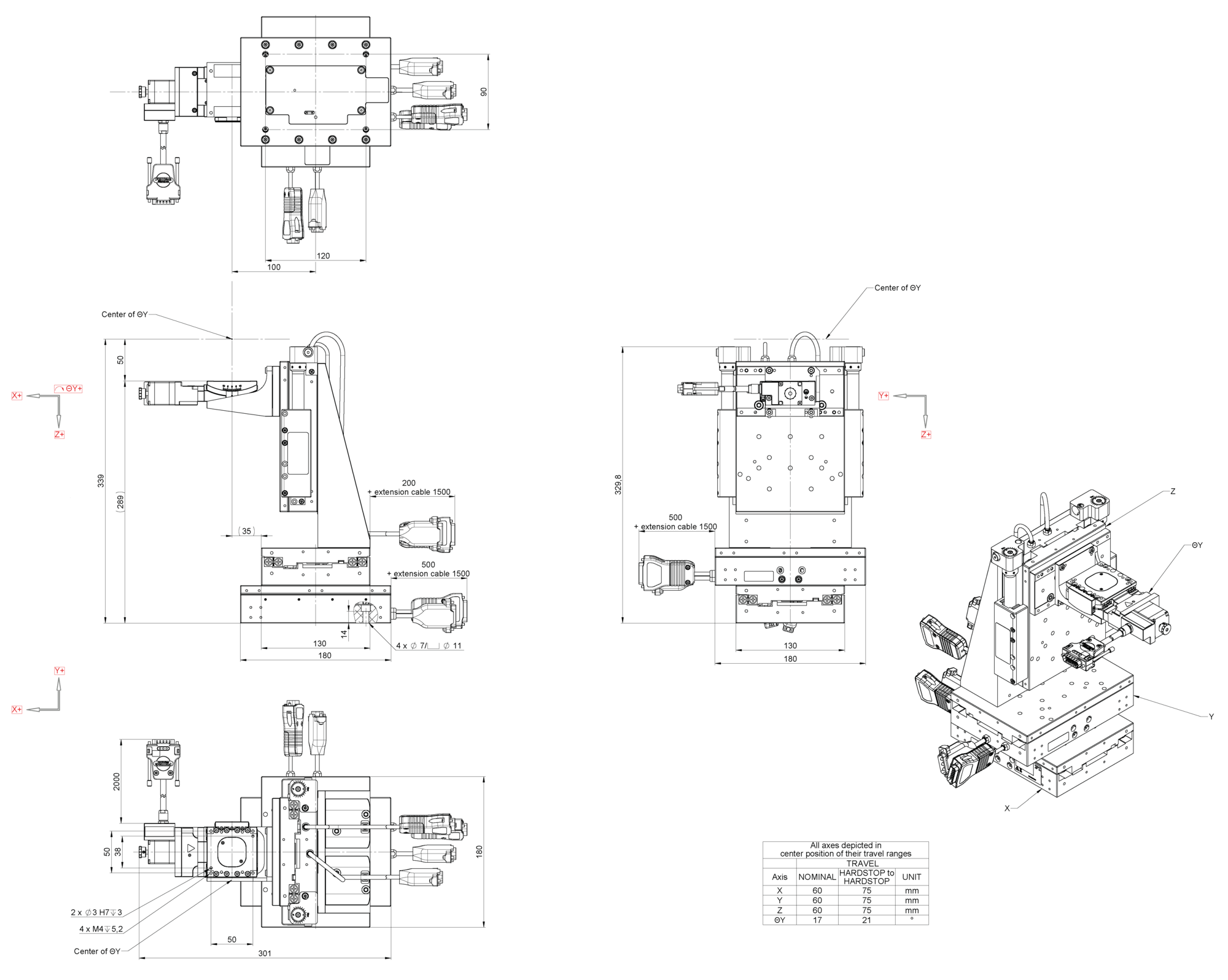
Abmessungen des F-572.74Y und F-572.74YN
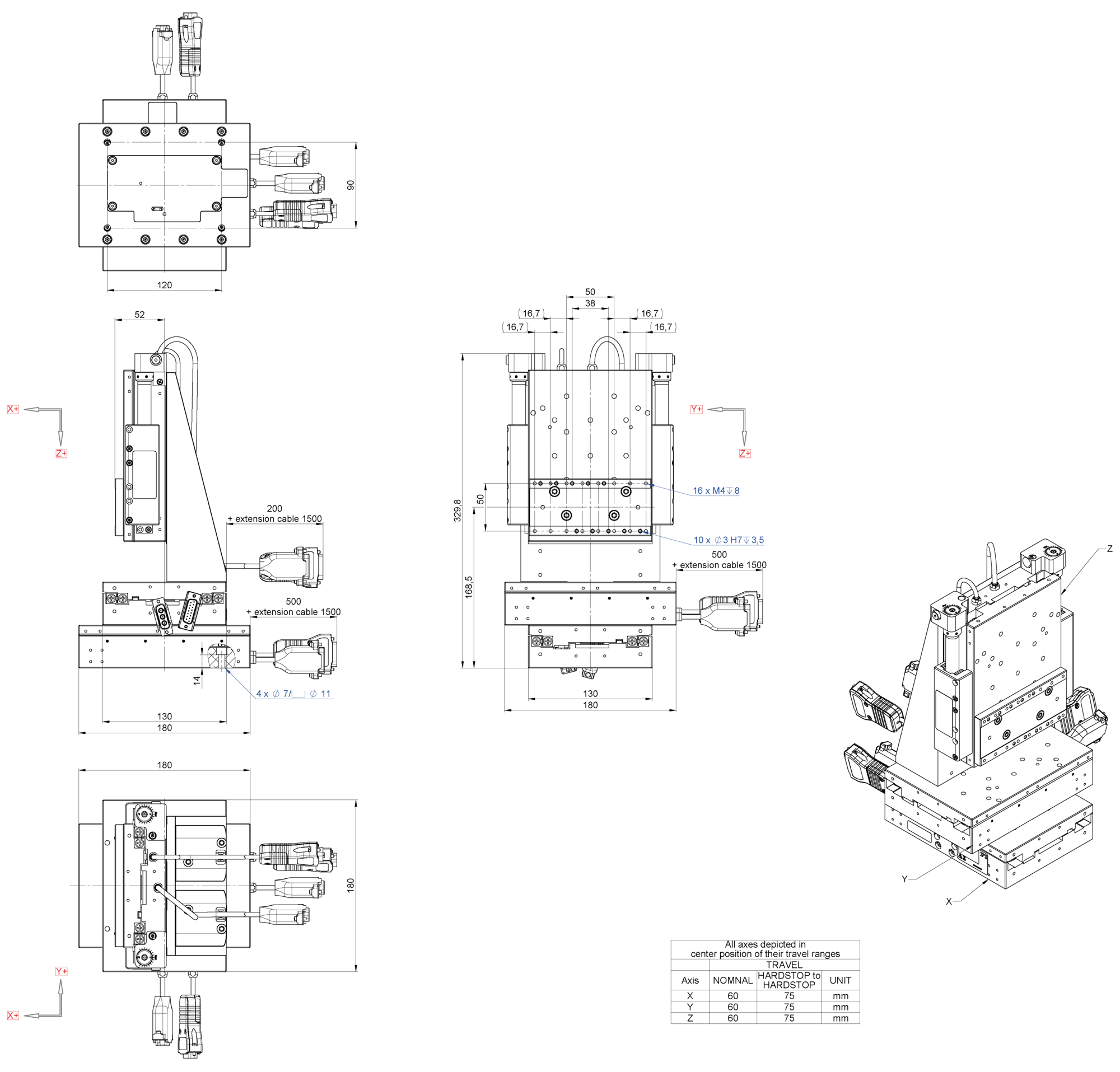
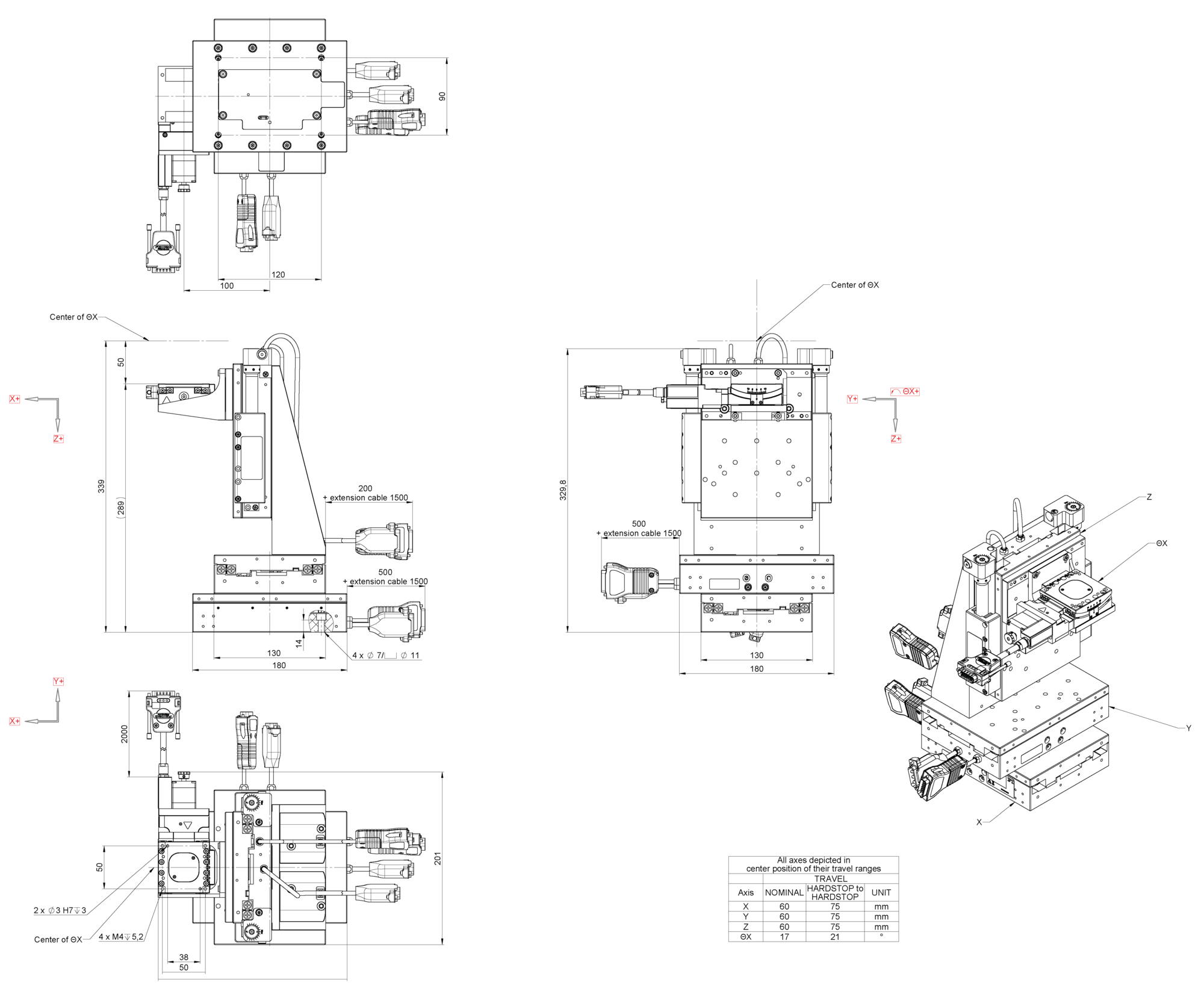
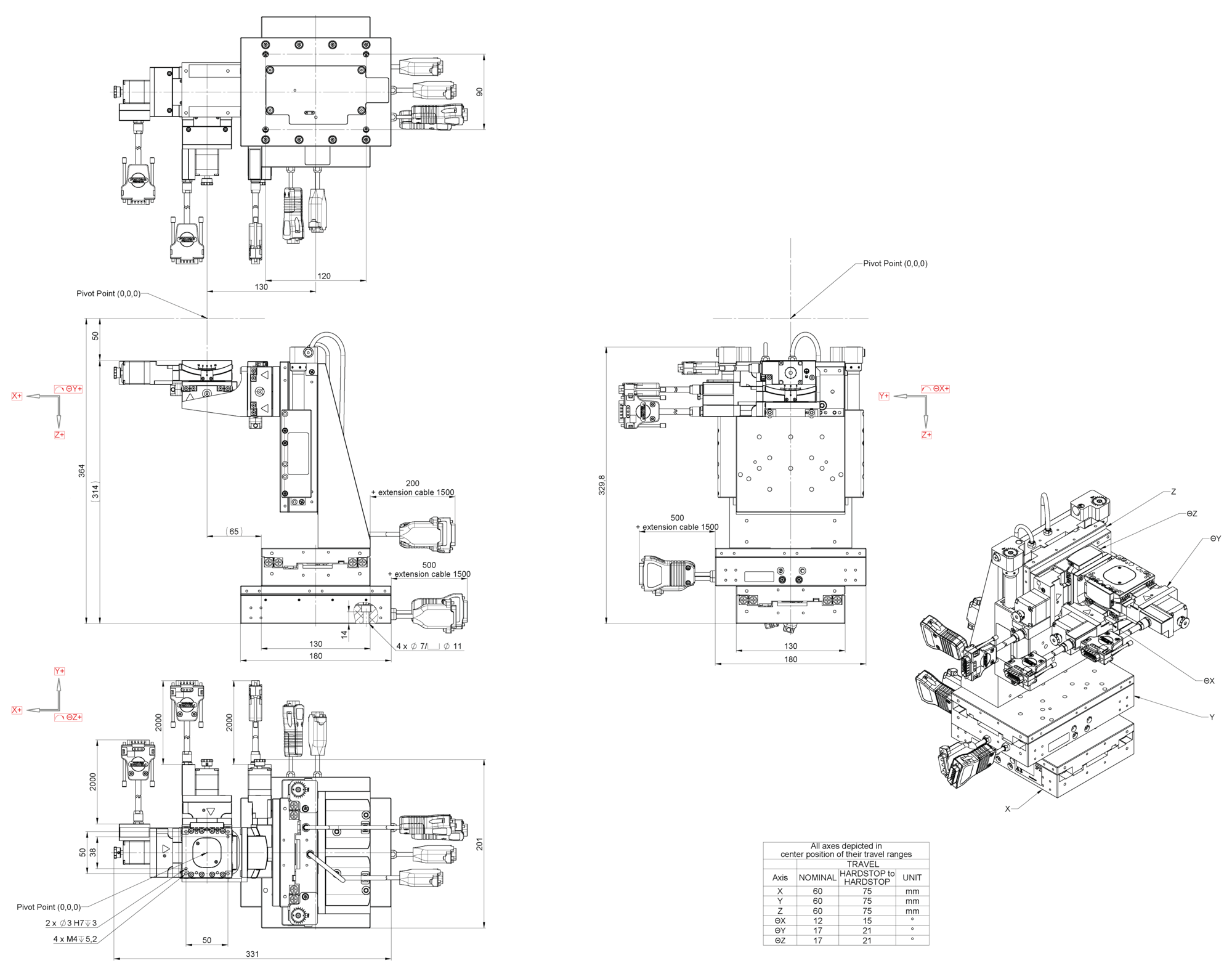
Abmessungen des F-572.630 und F-572.630N
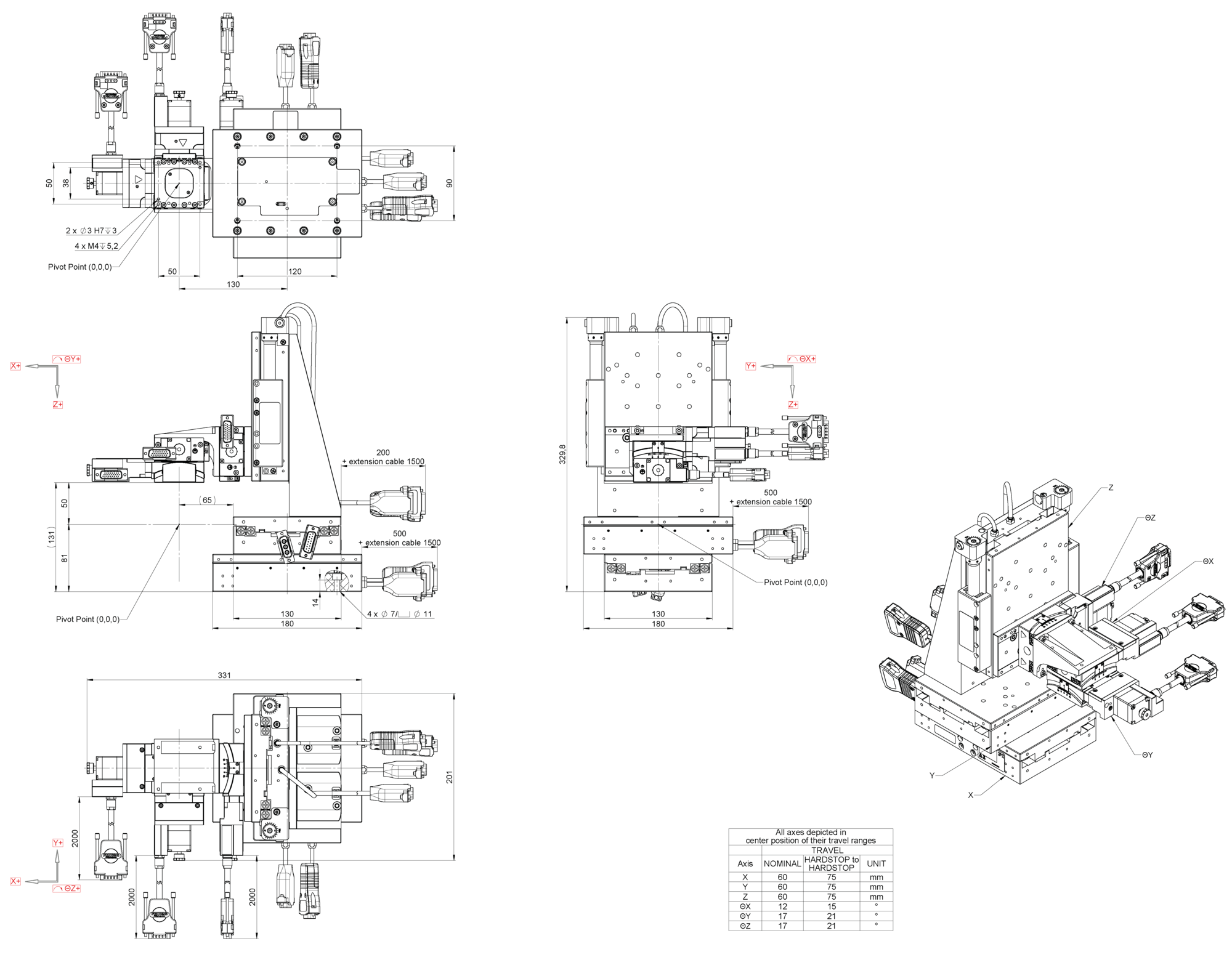
Abmessungen des F-572.663 und F-572.663N
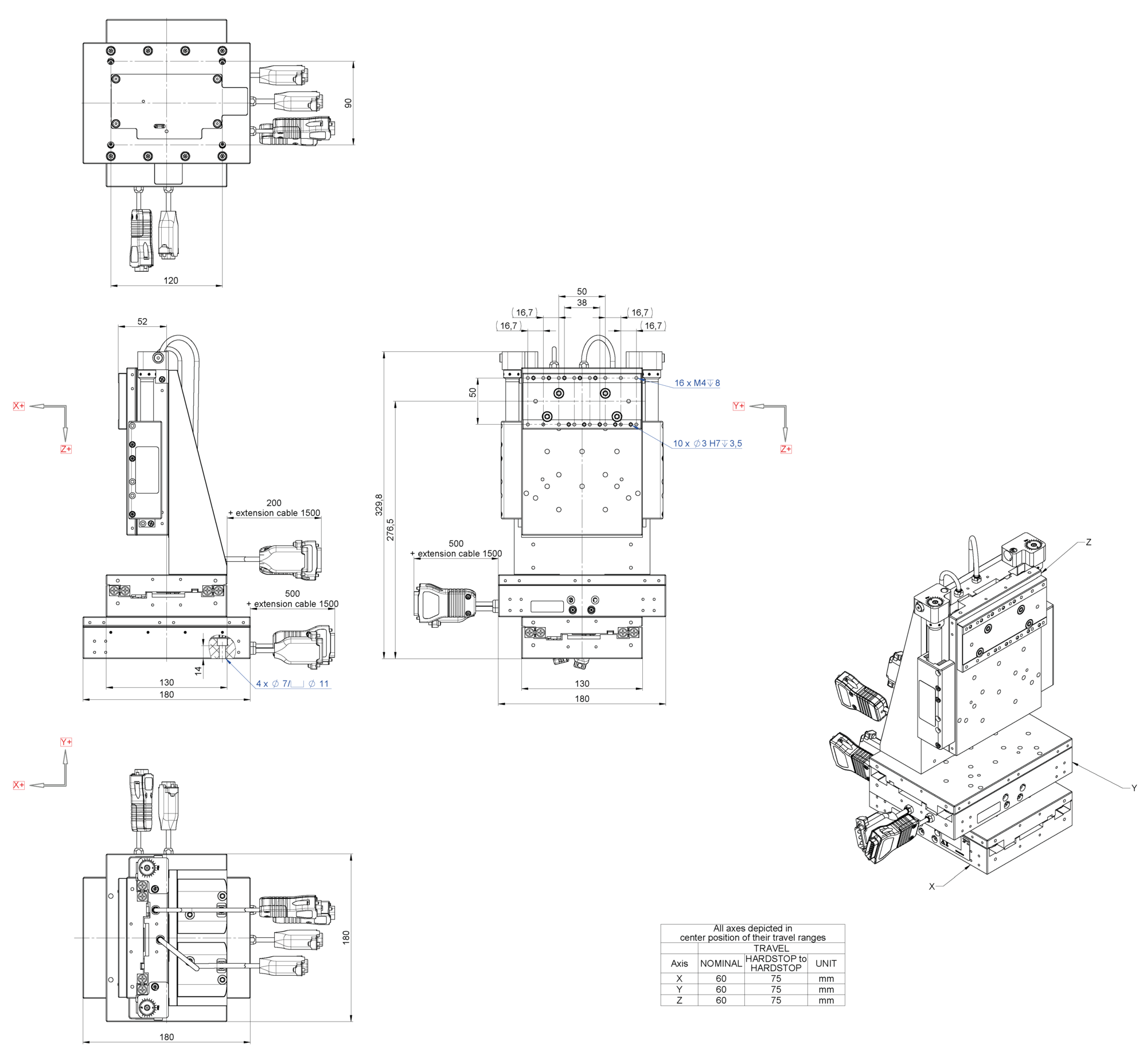
Abmessungen des F-572.730 und F-572.730N
Abmessungen des F-572.763 und F-572.763N









Das Ausrichtungssystem wird komplett mit vorkonfiguriertem ACS-Controller geliefert, der alle Achsen steuert. FMPA-Routinen für schnelle Flächenscans und Gradientensuchen sind im Controller implementiert (ACS Buffer). Dies ermöglicht eine drastische Reduktion der Ausrichtungszeiten im Prozessablauf; und dadurch auch der damit verbundenen Kosten. Als ideale Erweiterung für F-572 ist optional der ultraschnelle PILightning-Algorithmus zur First-Light-Suche erhältlich.
Anwendungen und Use Cases
Aufgrund seiner hohen Lastkapazität von 2kg und der herausragenden Genauigkeiten ist das System ideal für Applikationen in den folgenden Bereichen:
High-End Multi-Chiplevel-Test
LIDAR
Advanced Packaging
Technologie
Die verwendeten Linearachsen erreichen durch ihre kompakten, leistungsstarken magnetischen Linearantriebe hohe Geschwindigkeiten, und die Direktmetrologie mit optischem hochauflösendem Linearencoder sorgt für eine hochpräzise Regelung. Dabei hat das System einen für seine Lastklasse äußerst kompakten Formfaktor. Insgesamt ist das System damit maßgeschneidert für anspruchsvolle Aufgaben in der Photonik.
Controller und Software
ACS-Controller mit industrietauglichen Schnittstellen (TCP/IP und EtherCAT) und exzellentem Regelverhalten sowie bedienerfreundliche Software mit leitungsstarken und schnellen Ausrichtungsalgorithmen sind bereits Teil des Systems. Der PI-eigene extrem schnelle PILightning-Algorithmus ist optional verfügbar.
| Bewegen | F-572.630[N]F-572.730[N] | F-572.64X[N]F-572.74X[N] | F-572.64Y[N]F-572.74Y[N] | F-572.663[N]F-572.763[N] |
|---|---|---|---|---|
| Anzahl aktiver Achsen | 3 | 4 | 4 | 6 |
| Aktive Linearachsen | X, Y, Z | X, Y, Z | X, Y, Z | X, Y, Z |
| Aktive Rotationsachsen | — | θX | θY | θX, θY, θZ |
| Position Rotationsachsen bei F‑572.6xx[N] | Adapter unten | unten | unten | unten |
| Position Rotationsachsen bei F‑572.7xx[N] | Adapter oben | oben | oben | oben |
| Stellweg in X, Y, Z | 60 mm | 60 mm | 60 mm | 60 mm |
| Rotationsbereich in θX | — | 17° | — | 12° |
| Rotationsbereich in θY | — | — | 17° | 17° |
| Rotationsbereich in θZ | — | — | — | 17° |
| Maximale Geschwindigkeit in X, Y, Z | 500 mm/s | 500 mm/s | 500 mm/s | 500 mm/s |
| Maximale Winkelgeschwindigkeit in θX, θY, θZ | — | 10 °/s | 10 °/s | 10 °/s |
| Positionieren | F-572.630[N]F-572.730[N] | F-572.64X[N]F-572.74X[N] | F-572.64Y[N]F-572.74Y[N] | F-572.663[N]F-572.763[N] |
| F-572.6xx, F-572.7xx: Kleinste Schrittweite in X, Y, Z1) | 50 nm | 50 nm | 50 nm | 50 nm |
| F-572.6xxN, F-572.7xxN: Kleinste Schrittweite in X, Y, Z1) | 5 nm | 5 nm | 5 nm | 5 nm |
| Kleinste Schrittweite in θX, θY, θZ1) | — | 5 µrad | 5 µrad | 5 µrad |
| Bidirektionale Wiederholgenauigkeit in X, Y, Z; 10 % Stellweg1) | 150 nm | 150 nm | 150 nm | 150 nm |
| Bidirektionale Wiederholgenauigkeit in θX, θY, θZ; 10 % Stellweg 1) | — | 25 µrad | 25 µrad | 25 µrad |
| Sensorspezifikationen | F-572.630[N]F-572.730[N] | F-572.64X[N]F-572.74X[N] | F-572.64Y[N]F-572.74Y[N] | F-572.663[N]F-572.763[N] |
| Sensortyp X, Y, Z | Inkrementeller Linearencoder | |||
| Sensorsignal X, Y, Z | Sin/Cos, 1 V Spitze-Spitze | |||
| Sensortyp θX, θY, θZ | Inkrementeller Linearencoder | |||
| Sensorsignal θX, θY, θZ | A/B-Quadratur, RS-422 | |||
| Antriebseigenschaften | F-572.630[N]F-572.730[N] | F-572.64X[N]F-572.74X[N] | F-572.64Y[N]F-572.74Y[N] | F-572.663[N]F-572.763[N] |
| Antriebstyp X, Y, Z | Eisenloser 3-Phasen-Linearmotor | |||
| Antriebstyp θX, θY, θZ | — | 2-Phasen-Schrittmotor | ||
| PWM-Verstärker | F-572.6xx, F-572.7xx: —F-572.6xxN, F-572.7xxN: ja | |||
| Mechanische Eigenschaften | F-572.630[N]F-572.730[N] | F-572.64X[N]F-572.74X[N] | F-572.64Y[N]F-572.74Y[N] | F-572.663[N]F-572.763[N] |
| Max. Nutzlast | 2 kg | 2 kg | 2 kg | 2 kg |
| Masse | 13,8 kg | 14,5 kg | 14,5 kg | 16,2 kg |
| Masse inkl. Controller | ca. 29 kg | ca. 30 kg | ca. 30 kg | ca. 32 kg |
| Ausrichtung | F-572 | |||
| Scanzeit spiralförmiger Flächenscan 100 µm Ø2) | < 1 s | |||
| Scanzeit spiralförmiger Flächenscan 500 µm Ø2) | < 10 s | |||
| Signaloptimierung mit Gradientensuche3), randomisiert mit ±5 μm (Wiederholbarkeit < 0,01 dB) | 5 s | |||
| Anforderung an den verwendeten Powermeter | F-572 | |||
| Maximaler Ausgangsspannungsbereich | 10 V | |||
| Minimale Bandbreite | 20 kHz | |||
| Maximaler Rauschpegel | 120 dBm | |||
| Anschlüsse und Umgebung | F-572.630[N]F-572.730[N] | F-572.64X[N]F-572.74X[N] | F-572.64Y[N]F-572.74Y[N] | F-572.663[N]F-572.763[N] |
| Controller für F-572 ohne PWM-Verstärker | G-901K068 | G-901K069 | ||
| Controller für F-572 mit PWM-Verstärker | G-901K071 | G-901K072 | ||
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Photonikausrichtungssystem mit 3 Linearachsen: X, Y, Z; 60 mm Stellweg in X, Y, Z; 500 mm/s maximale Geschwindigkeit der Linearachsen; 50 nm kleinste Schrittweite in X, Y, Z; Adapter für Rotationsachsen unten; inklusive Controller
Photonikausrichtungssystem mit 3 Linearachsen: X, Y, Z; 60 mm Stellweg in X, Y, Z; 500 mm/s maximale Geschwindigkeit der Linearachsen; 5 nm kleinste Schrittweite in X, Y, Z; Adapter für Rotationsachsen unten; PWM-Verstärker; inklusive Controller mit PWM-Verstärker
Photonikausrichtungssystem mit 3 Linearachsen: X, Y, Z; 60 mm Stellweg in X, Y, Z; 500 mm/s maximale Geschwindigkeit der Linearachsen; 50 nm kleinste Schrittweite in X, Y, Z; Adapter für Rotationsachsen oben; inklusive Controller
Photonikausrichtungssystem mit 3 Linearachsen: X, Y, Z; 60 mm Stellweg in X, Y, Z; 500 mm/s maximale Geschwindigkeit der Linearachsen; 5 nm kleinste Schrittweite in X, Y, Z; Adapter für Rotationsachsen oben; PWM-Verstärker; inklusive Controller mit PWM-Verstärker
Photonikausrichtungssystem mit 3 Linearachsen und 1 Rotationsachse: X, Y, Z, θX; 60 mm Stellweg in X, Y, Z; 17° Rotationsbereich in θX; 500 mm/s maximale Geschwindigkeit der Linearachsen; 10 °/s maximale Geschwindigkeit der Rotationsachse; 50 nm kleinste Schrittweite in X, Y, Z; 5 μrad kleinste Schrittweite in θX; Rotationsachse unten; inklusive Controller
Photonikausrichtungssystem mit 3 Linearachsen und 1 Rotationsachse: X, Y, Z, θX; 60 mm Stellweg in X, Y, Z; 17° Rotationsbereich in θX; 500 mm/s maximale Geschwindigkeit der Linearachsen; 10 °/s maximale Geschwindigkeit der Rotationsachse; 5 nm kleinste Schrittweite in X, Y, Z; 5 μrad kleinste Schrittweite in θX; Rotationsachse unten; PWM-Verstärker; inklusive Controller mit PWM-Verstärker
Photonikausrichtungssystem mit 3 Linearachsen und 1 Rotationsachse: X, Y, Z, θX; 60 mm Stellweg in X, Y, Z; 17° Rotationsbereich in θX; 500 mm/s maximale Geschwindigkeit der Linearachsen; 10 °/s maximale Geschwindigkeit der Rotationsachse; 50 nm kleinste Schrittweite in X, Y, Z; 5 μrad kleinste Schrittweite in θX; Rotationsachse oben; inklusive Controller
Photonikausrichtungssystem mit 3 Linearachsen und 1 Rotationsachse: X, Y, Z, θX; 60 mm Stellweg in X, Y, Z; 17° Rotationsbereich in θX; 500 mm/s maximale Geschwindigkeit der Linearachsen; 10 °/s maximale Geschwindigkeit der Rotationsachse; 5 nm kleinste Schrittweite in X, Y, Z; 5 μrad kleinste Schrittweite in θX; Rotationsachse oben; PWM-Verstärker; inklusive Controller mit PWM-Verstärker
Photonikausrichtungssystem mit 3 Linearachsen und 1 Rotationsachse: X, Y, Z, θY; 60 mm Stellweg in X, Y, Z; 17° Rotationsbereich in θY; 500 mm/s maximale Geschwindigkeit der Linearachsen; 10 °/s maximale Geschwindigkeit der Rotationsachse; 50 nm kleinste Schrittweite in X, Y, Z; 5 μrad kleinste Schrittweite in θY; Rotationsachse unten; inklusive Controller
Photonikausrichtungssystem mit 3 Linearachsen und 1 Rotationsachse: X, Y, Z, θY; 60 mm Stellweg in X, Y, Z; 17° Rotationsbereich in θY; 500 mm/s maximale Geschwindigkeit der Linearachsen; 10 °/s maximale Geschwindigkeit der Rotationsachse; 5 nm kleinste Schrittweite in X, Y, Z; 5 μrad kleinste Schrittweite in θY; Rotationsachse unten; PWM-Verstärker; inklusive Controller mit PWM-Verstärker
Photonikausrichtungssystem mit 3 Linearachsen und 1 Rotationsachse: X, Y, Z, θY; 60 mm Stellweg in X, Y, Z; 17° Rotationsbereich in θY; 500 mm/s maximale Geschwindigkeit der Linearachsen; 10 °/s maximale Geschwindigkeit der Rotationsachse; 50 nm kleinste Schrittweite in X, Y, Z; 5 μrad kleinste Schrittweite in θY; Rotationsachse oben; inklusive Controller
Photonikausrichtungssystem mit 3 Linearachsen und 1 Rotationsachse: X, Y, Z, θY; 60 mm Stellweg in X, Y, Z; 17° Rotationsbereich in θY; 500 mm/s maximale Geschwindigkeit der Linearachsen; 10 °/s maximale Geschwindigkeit der Rotationsachse; 5 nm kleinste Schrittweite in X, Y, Z; 5 μrad kleinste Schrittweite in θY; Rotationsachse oben; PWM-Verstärker; inklusive Controller mit PWM-Verstärker
Photonikausrichtungssystem mit 3 Linearachsen und 3 Rotationsachsen: X, Y, Z, θX, θY, θZ; 60 mm Stellweg in X, Y, Z; 12° Rotationsbereich in θX, 17° Rotationsbereich in θY, θZ; 500 mm/s maximale Geschwindigkeit der Linearachsen; 10 °/s maximale Geschwindigkeit der Rotationsachse; 50 nm kleinste Schrittweite in X, Y, Z; 5 μrad kleinste Schrittweite in θX, θY, θZ; Rotationsachse unten; inklusive Controller
Photonikausrichtungssystem mit 3 Linearachsen und 3 Rotationsachsen: X, Y, Z, θX, θY, θZ; 60 mm Stellweg in X, Y, Z; 12° Rotationsbereich in θX, 17° Rotationsbereich in θY, θZ; 500 mm/s maximale Geschwindigkeit der Linearachsen; 10 °/s maximale Geschwindigkeit der Rotationsachse; 5 nm kleinste Schrittweite in X, Y, Z; 5 μrad kleinste Schrittweite in θX, θY, θZ; Rotationsachse unten; PWM-Verstärker; inklusive Controller mit PWM-Verstärker
Photonikausrichtungssystem mit 3 Linearachsen und 3 Rotationsachsen: X, Y, Z, θX, θY, θZ; 60 mm Stellweg in X, Y, Z; 12° Rotationsbereich in θX, 17° Rotationsbereich in θY, θZ; 500 mm/s maximale Geschwindigkeit der Linearachsen; 10 °/s maximale Geschwindigkeit der Rotationsachse; 50 nm kleinste Schrittweite in X, Y, Z; 5 μrad kleinste Schrittweite in θX, θY, θZ; Rotationsachse oben; inklusive Controller
Photonikausrichtungssystem mit 3 Linearachsen und 3 Rotationsachsen: X, Y, Z, θX, θY, θZ; 60 mm Stellweg in X, Y, Z; 12° Rotationsbereich in θX, 17° Rotationsbereich in θY, θZ; 500 mm/s maximale Geschwindigkeit der Linearachsen; 10 °/s maximale Geschwindigkeit der Rotationsachse; 5 nm kleinste Schrittweite in X, Y, Z; 5 μrad kleinste Schrittweite in θX, θY, θZ; Rotationsachse oben; PWM-Verstärker; inklusive Controller mit PWM-Verstärker
Firmwarefeature für F-572 Ausrichtungssysteme; schnelle First-Light-Suche; für Oberflächen- und Kantenkopplung
Kabelhalter für F-572 Ausrichtungssysteme
Adapterplatte zur Breadboard-Montage von F-572 Ausrichtungssystemen, 150 mm x 150 mm, Bohrraster für M6-Gewinde
Faserhalter für F-572 Ausrichtungssysteme, zur Oberflächenkopplung, 8° Winkel
Faserhalter für F-572 Ausrichtungssysteme, zur Kantenkopplung
Faserarrayhalter für F-572 Ausrichtungssysteme, zur Oberflächenkopplung, 8° Winkel
Faserarrayhalter für F-572 Ausrichtungssysteme, zur Kantenkopplung
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.