|
Aktive Achsen
|
X
|
X
|
X
|
X
|
|
|
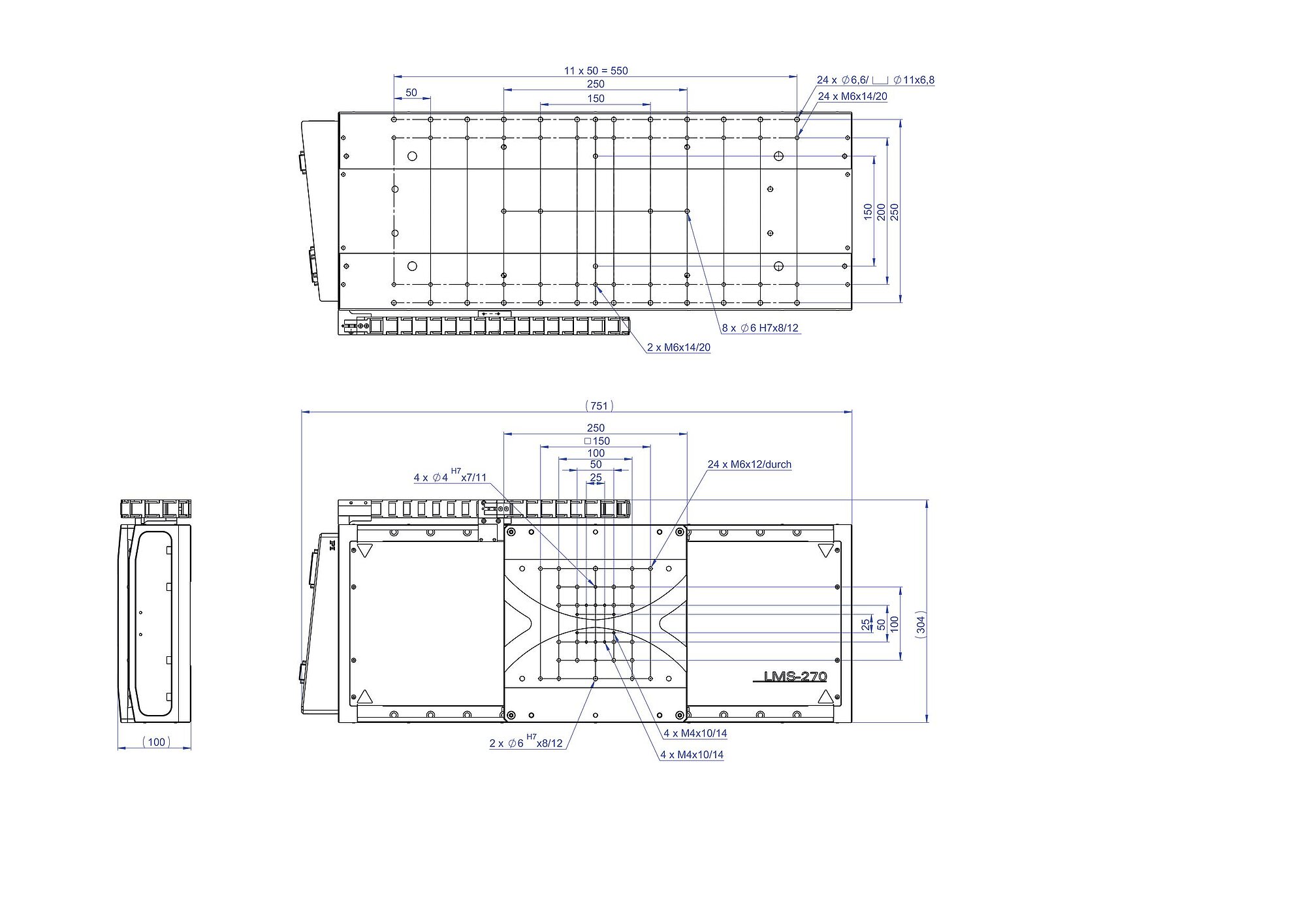
Stellweg in X
|
304 mm
|
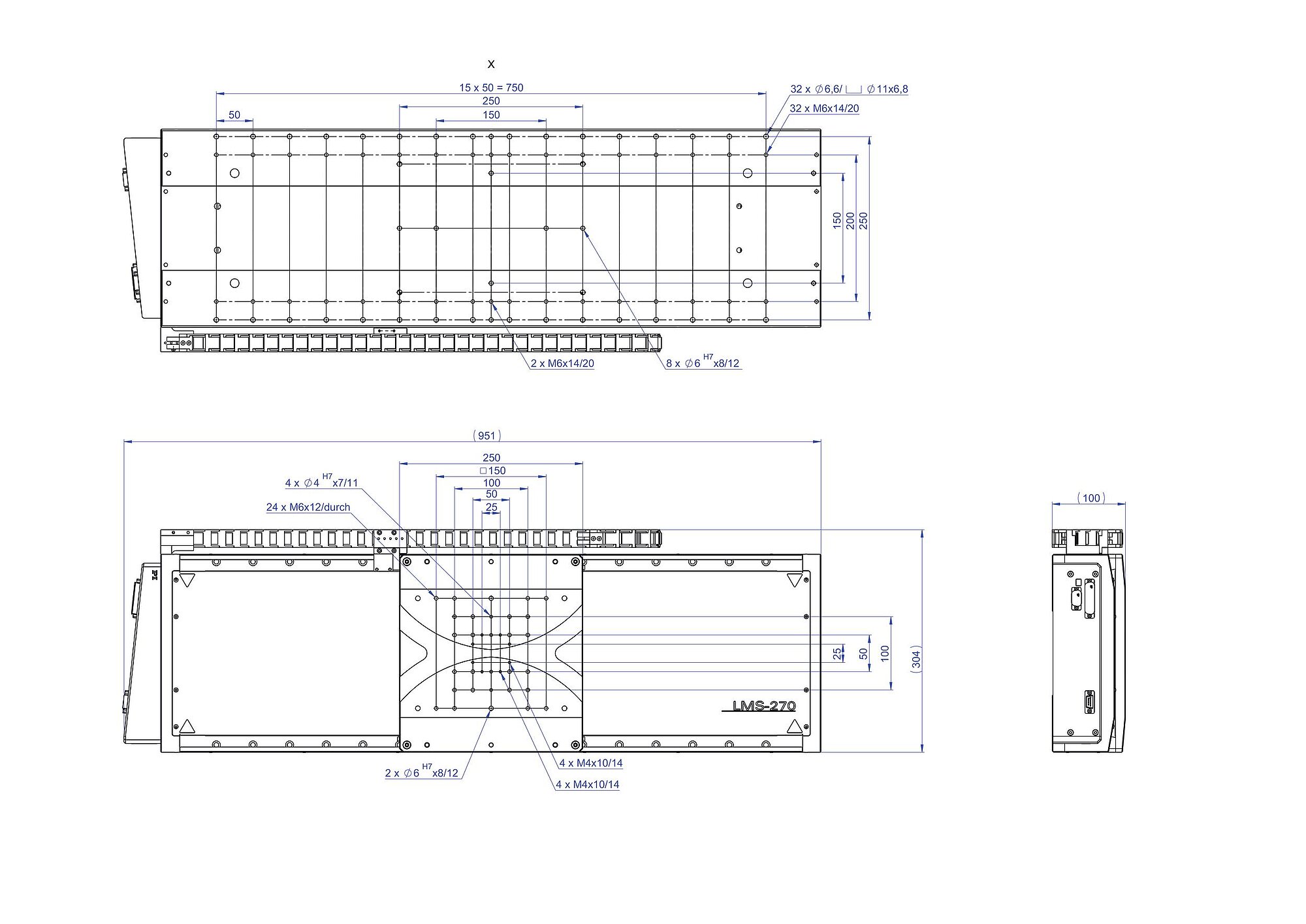
508 mm
|
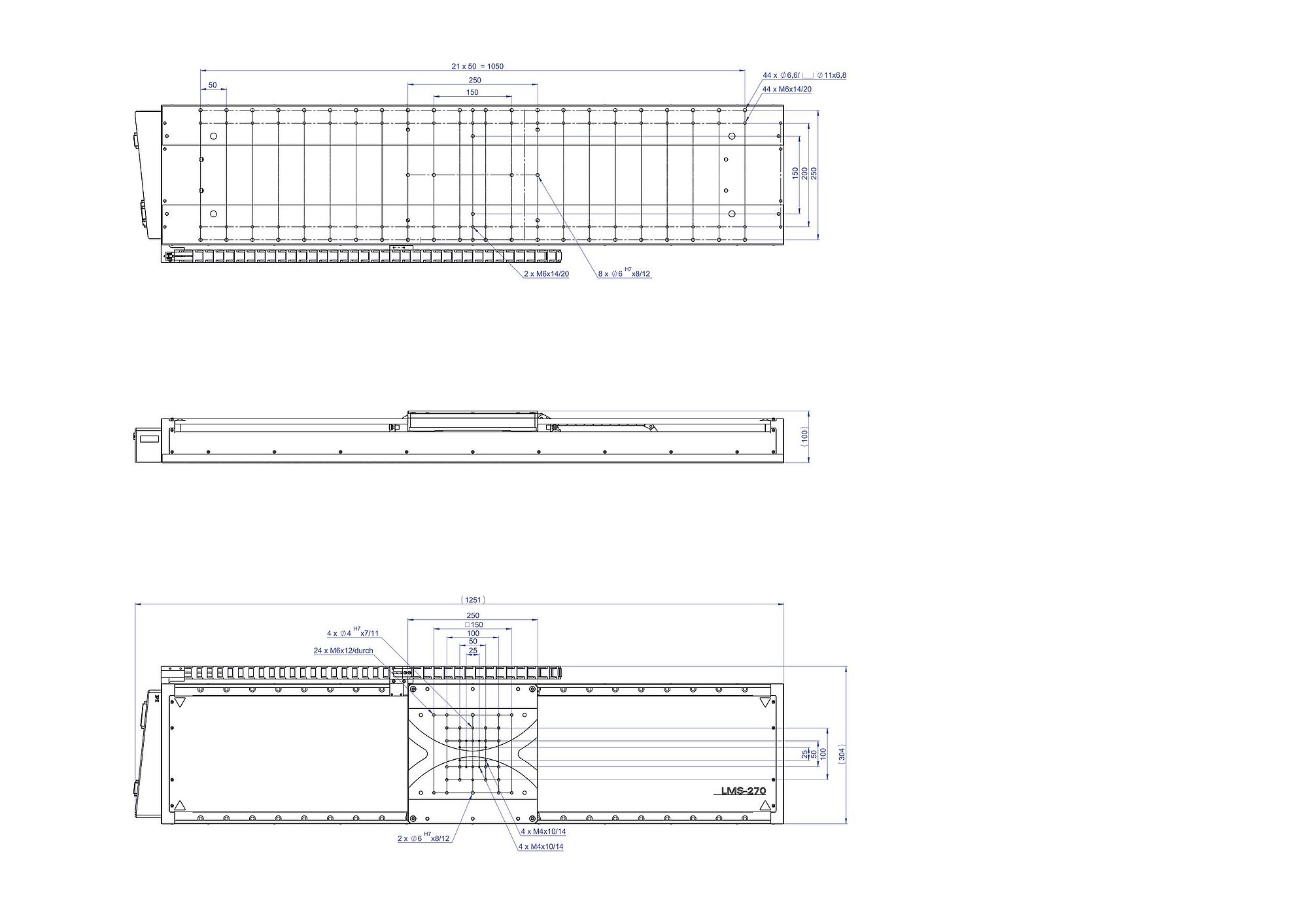
813 mm
|
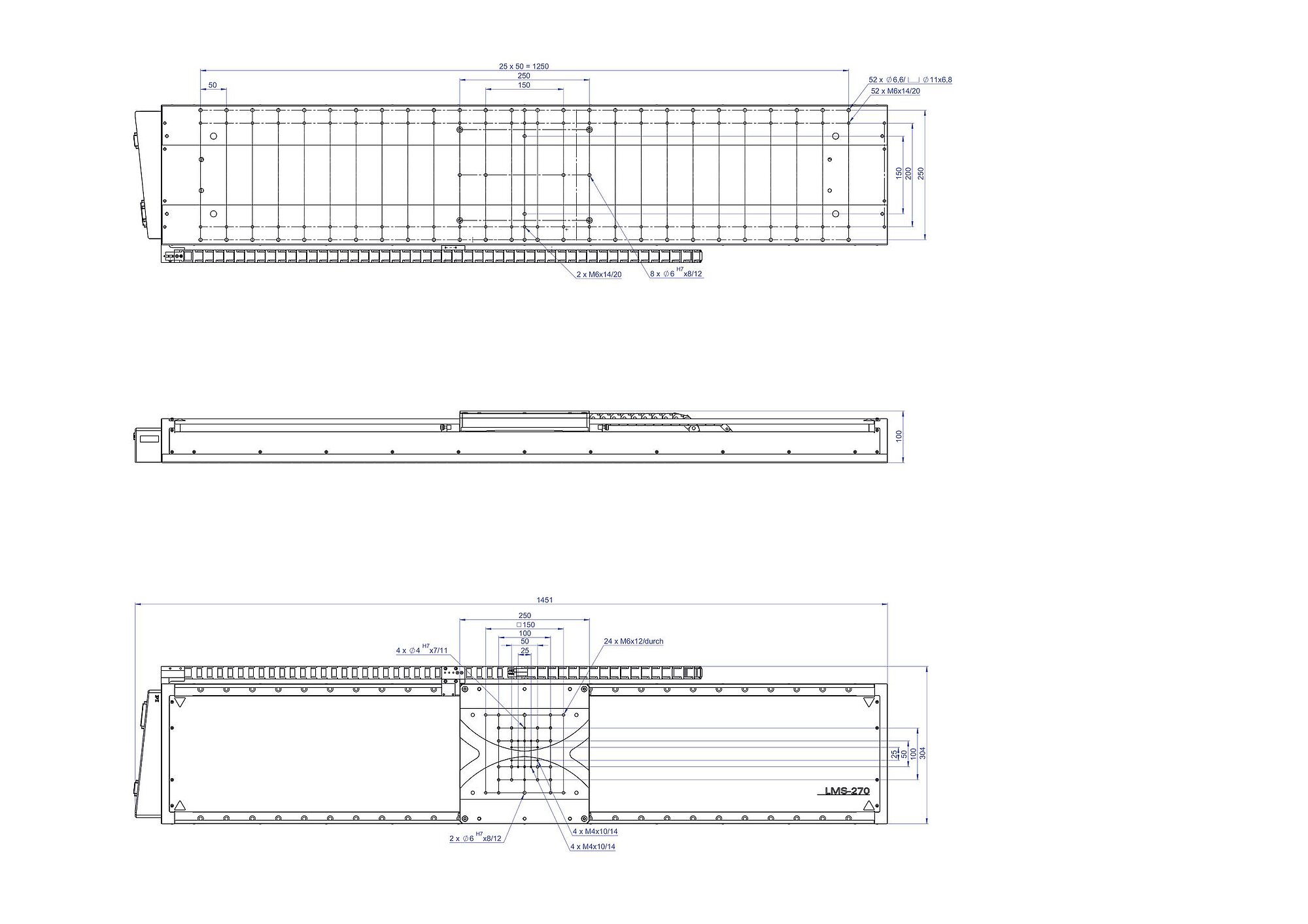
1016 mm
|
|
|
Maximale Geschwindigkeit in X, unbelastet
|
800 mm/s
|
800 mm/s
|
800 mm/s
|
800 mm/s
|
|
|
Geradheit (Lineares Übersprechen in Y bei Bewegung in X)
|
± 3 µm
|
± 4 µm
|
± 7 µm
|
± 10 µm
|
typ.
|
|
Ebenheit (Lineares Übersprechen in Z bei Bewegung in X)
|
± 3 µm
|
± 4 µm
|
± 7 µm
|
± 10 µm
|
typ.
|
|
Neigen (Rotatorisches Übersprechen in θY bei Bewegung in X)
|
± 40 µrad
|
± 80 µrad
|
± 100 µrad
|
± 120 µrad
|
typ.
|
|
Gieren (Rotatorisches Übersprechen in θZ bei Bewegung in X)
|
± 20 µrad
|
± 30 µrad
|
± 40 µrad
|
± 50 µrad
|
typ.
|
|
Positionieren
|
6239500057
|
6239500021
|
6239500058
|
6239500059
|
Toleranz
|
|
Kleinste Schrittweite in X
|
0,05 µm
|
0,05 µm
|
0,05 µm
|
0,05 µm
|
typ.
|
|
Positioniergenauigkeit in X, unkalibriert
|
± 70 µm
|
± 70 µm
|
± 70 µm
|
± 70 µm
|
typ.
|
|
Unidirektionale Wiederholgenauigkeit in X
|
± 0,0375 µm
|
± 0,0375 µm
|
± 0,0375 µm
|
± 0,0375 µm
|
typ.
|
|
Bidirektionale Wiederholgenauigkeit in X
|
0,3 µm
|
0,3 µm
|
0,3 µm
|
0,3 µm
|
typ.
|
|
Endschalter
|
Induktiv
|
Induktiv
|
Induktiv
|
Induktiv
|
|
|
Integrierter Sensor
|
Inkrementeller Linearencoder
|
Inkrementeller Linearencoder
|
Inkrementeller Linearencoder
|
Inkrementeller Linearencoder
|
|
|
Sensorsignal
|
Sin/Cos, 1 V Spitze-Spitze
|
Sin/Cos, 1 V Spitze-Spitze
|
Sin/Cos, 1 V Spitze-Spitze
|
Sin/Cos, 1 V Spitze-Spitze
|
|
|
Sensorauflösung
|
15 nm
|
15 nm
|
15 nm
|
15 nm
|
|
|
Antriebseigenschaften
|
6239500057
|
6239500021
|
6239500058
|
6239500059
|
Toleranz
|
|
Antriebstyp
|
Eisenloser 3-Phasen-Linearmotor
|
Eisenloser 3-Phasen-Linearmotor
|
Eisenloser 3-Phasen-Linearmotor
|
Eisenloser 3-Phasen-Linearmotor
|
|
|
Nennspannung
|
48 V
|
48 V
|
48 V
|
48 V
|
|
|
Nennstrom, effektiv
|
3,7 A
|
3,7 A
|
3,7 A
|
3,7 A
|
typ.
|
|
Spitzenstrom, effektiv
|
17,5 A
|
17,5 A
|
17,5 A
|
17,5 A
|
typ.
|
|
Antriebskraft in X
|
100 N
|
100 N
|
100 N
|
100 N
|
typ.
|
|
Spitzenkraft in X
|
480 N
|
480 N
|
480 N
|
480 N
|
|
|
Kraftkonstante
|
27,5 N/A
|
27,5 N/A
|
27,5 N/A
|
27,5 N/A
|
|
|
Widerstand Phase-Phase
|
1,28 Ω
|
1,28 Ω
|
1,28 Ω
|
1,28 Ω
|
typ.
|
|
Induktivität Phase-Phase
|
1 mH
|
1 mH
|
1 mH
|
1 mH
|
|
|
Gegen-EMK Phase-Phase
|
22,5 V·s/m
|
22,5 V·s/m
|
22,5 V·s/m
|
22,5 V·s/m
|
max.
|
|
Polteilung N-N
|
42 mm
|
42 mm
|
42 mm
|
42 mm
|
|
|
Mechanische Eigenschaften
|
6239500057
|
6239500021
|
6239500058
|
6239500059
|
Toleranz
|
|
Zulässige Druckkraft in Y
|
500 N
|
500 N
|
500 N
|
500 N
|
max.
|
|
Zulässige Druckkraft in Z
|
500 N
|
500 N
|
500 N
|
500 N
|
max.
|
|
Bewegte Masse in X, unbelastet
|
2500 g
|
2500 g
|
2500 g
|
2500 g
|
|
|
Führung
|
Kugelumlaufführung
|
Kugelumlaufführung
|
Kugelumlaufführung
|
Kugelumlaufführung
|
|
|
Gesamtmasse
|
35000 g
|
42000 g
|
51000 g
|
61000 g
|
|
|
Material
| Aluminium, schwarz eloxiert | Aluminium, schwarz eloxiert | Aluminium, schwarz eloxiert | Aluminium, schwarz eloxiert |
|
|
Anschlüsse und Umgebung
|
6239500057
|
6239500021
|
6239500058
|
6239500059
|
Toleranz
|
|
Betriebstemperaturbereich
|
10 bis 50 °C
|
10 bis 50 °C
|
10 bis 50 °C
|
10 bis 50 °C
|
|
|
Anschluss
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
|
|
Sensoranschluss
|
D-Sub 9-polig (m)
|
D-Sub 9-polig (m)
|
D-Sub 9-polig (m)
|
D-Sub 9-polig (m)
|
|
|
Empfohlene Controller / Treiber
| Modularer ACS-Controller | Modularer ACS-Controller | Modularer ACS-Controller | Modularer ACS-Controller |
|
|
Anschluss für Temperatursensor
|
HD D-Sub 15-polig (m)
|
HD D-Sub 15-polig (m)
|
HD D-Sub 15-polig (m)
|
HD D-Sub 15-polig (m)
|
|