C-887.53
6-Achs-Controller für Hexapoden, TCP/IP, RS-232, Tischgerät, inkl. Ansteuerung von zwei Zusatzachsen, EtherCAT-Schnittstelle






Digitalcontroller mit EtherCAT Feldbus-Schnittstelle
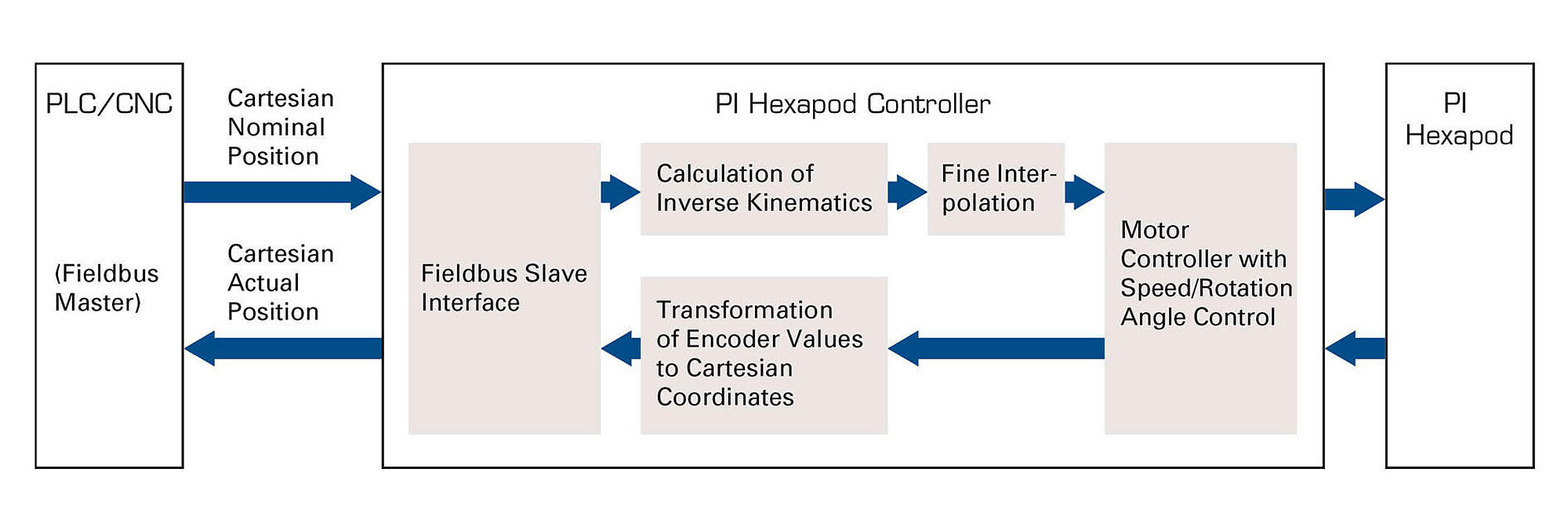
Digitalcontroller für Hexapoden (6-Achsen-Parallelkinematiken). Zusätzlich können die Motortreiber für zwei weitere Einzelachsen angesteuert werden. Für den Betrieb in einem EtherCAT-Netzwerk ist auf Anwenderseite eine übergeordnete SPS-Steuerung erforderlich (EtherCAT Master mit CoE Protokoll). Der Betrieb ohne SPS-Steuerung ist über TCP/IP oder RS-232 möglich. Der Controller entspricht dann in der Funktionalität einem C-887.52x und wird mit dem Befehlssatz GCS 2.0 angesteuert.
Funktionen
Die Positionseingabe erfolgt in kartesischen Koordinaten, aus denen der Controller die Ansteuerung der Kinematik berechnet. Um den Hexapod einfach zu integrieren, können die Koordinatensysteme (Work, Tool) geändert werden. Der Pivotpunkt ist dabei frei im Raum definierbar. Ein Datenrekorder kann Betriebsgrößen wie z. B. Motoransteuerung, Geschwindigkeit, Position oder Positionsfehler aufzeichnen. Die Ausführung von Makros und Python-Skripten auf dem Controller ermöglicht den Stand-Alone-Betrieb. Der Controller unterstützt alle derzeit verfügbaren Standard-Hexapoden von PI und darüber hinaus auch kundenspezifische Parallelkinematiken.
Schnittstellen
EtherCAT Feldbus-Schnittstelle. TCP/IP zur netzwerkbasierten Ansteuerung und Wartung. RS-232. USB-Anschluss für manuelle Bedieneinheit.
Zusätzliche Schnittstellen (versionsabhängig)
Optional
Softwareunterstützung (bei Ansteuerung über GCS)
PIMikroMove® Bedienersoftware ermöglicht z. B. die grafische Darstellung von Fast-Alignment-Routinen. Umfangreicher Satz von Treibern z. B. zur Verwendung mit C, C++, C#, NI LabVIEW, MATLAB und Python. PIHexapodEmulator für virtuelle Inbetriebnahme ohne Hardware.
Lieferumfang
Die Lieferung umfasst den Controller, ein Softwarepaket und ein Netzteil zur Spannungsversorgung. Es wird empfohlen, die Hexapod-Mechanik und einen passenden Kabelsatz zusammen mit dem Controller zu bestellen, damit die Komponenten aufeinander abgestimmt werden können. Ein SPS-Master-Controller ist nicht im Lieferumfang enthalten!
| Grundlegendes | C-887.53 | C-887.531 | C-887.532 | C-887.533 | |
|---|---|---|---|---|---|
| Achsen/Kanäle | 6 | 6 | 6 | 6 | |
| Zusatzachsen | 2 Einzelachsen | 2 Einzelachsen | 2 Einzelachsen | 2 Einzelachsen | |
| Prozessor | Intel Atom Dual Core (1,8 GHz) | Intel Atom Dual Core (1,8 GHz) | Intel Atom Dual Core (1,8 GHz) | Intel Atom Dual Core (1,8 GHz) | |
| Anwendungsbezogene Funktionen | Controller Makros GCS ǀ Controller Makros PIPython ǀ Datenrekorder ǀ Startup-Makro | Controller Makros GCS ǀ Controller Makros PIPython ǀ Datenrekorder ǀ Fast Alignment ǀ Startup-Makro | Controller Makros GCS ǀ Controller Makros PIPython ǀ Datenrekorder ǀ Startup-Makro | Controller Makros GCS ǀ Controller Makros PIPython ǀ Datenrekorder ǀ Fast Alignment ǀ Startup-Makro | |
| Schutzfunktionen | Ausschalten des Servomodus im Fehlerfall | Ausschalten des Servomodus im Fehlerfall | Achsabschaltung über externen Schalter ǀ Ausschalten des Servomodus im Fehlerfall | Achsabschaltung über externen Schalter ǀ Ausschalten des Servomodus im Fehlerfall | |
| Konfigurations-Management | Auslesen des ID-Chips ǀ manuelle Parametereingabe | Auslesen des ID-Chips ǀ manuelle Parametereingabe | Auslesen des ID-Chips ǀ manuelle Parametereingabe | Auslesen des ID-Chips ǀ manuelle Parametereingabe | |
| Unterstützter ID-Chip | ID-Chip 2.0 | ID-Chip 2.0 | ID-Chip 2.0 | ID-Chip 2.0 | |
| Bewegung und Regler | C-887.53 | C-887.531 | C-887.532 | C-887.533 | |
| Unterstütztes Sensorsignal | A/B-Quadratur, RS-422 ǀ BiSS-C | A/B-Quadratur, RS-422 ǀ BiSS-C | A/B-Quadratur, RS-422 ǀ BiSS-C | A/B-Quadratur, RS-422 ǀ BiSS-C | |
| Geregelte Größen | Position | Position | Position | Position | |
| Maximale Regelfrequenz (Servozyklus) | 10000 Hz | 10000 Hz | 10000 Hz | 10000 Hz | |
| Bewegungstypen | Punkt-zu-Punkt-Bewegung mit Profilgenerator ǀ Zyklisch synchrone Zielwertvorgabe für Position ǀ Area Scan Routinen ǀ Gradient Search Routinen ǀ Funktionsgenerator | Punkt-zu-Punkt-Bewegung mit Profilgenerator ǀ Zyklisch synchrone Zielwertvorgabe für Position ǀ Area Scan Routinen ǀ Gradient Search Routinen ǀ Funktionsgenerator | Punkt-zu-Punkt-Bewegung mit Profilgenerator ǀ Zyklisch synchrone Zielwertvorgabe für Position ǀ Area Scan Routinen ǀ Gradient Search Routinen ǀ Funktionsgenerator | Punkt-zu-Punkt-Bewegung mit Profilgenerator ǀ Zyklisch synchrone Zielwertvorgabe für Position ǀ Area Scan Routinen ǀ Gradient Search Routinen ǀ Funktionsgenerator | |
| Koordinierung der Bewegung | Koordinierte Mehrachsenbewegung ǀ Anwenderdefinierte Koordinatensysteme ǀ Work- und Tool-Koordinatensysteme | Koordinierte Mehrachsenbewegung ǀ Anwenderdefinierte Koordinatensysteme ǀ Work- und Tool-Koordinatensysteme | Koordinierte Mehrachsenbewegung ǀ Anwenderdefinierte Koordinatensysteme ǀ Work- und Tool-Koordinatensysteme | Koordinierte Mehrachsenbewegung ǀ Anwenderdefinierte Koordinatensysteme ǀ Work- und Tool-Koordinatensysteme | |
| Referenzschaltereingang | TTL | TTL | TTL | TTL | |
| Endschaltereingang | TTL | TTL | TTL | TTL | |
| Schnittstellen und Bedienung | C-887.53 | C-887.531 | C-887.532 | C-887.533 | |
| Kommunikationsschnittstellen | EtherCAT Slave ǀ RS-232 ǀ TCP/IP ǀ USB (nur für manuelle Bedieneinheiten) | EtherCAT Slave ǀ RS-232 ǀ TCP/IP ǀ USB (nur für manuelle Bedieneinheiten) | EtherCAT Slave ǀ RS-232 ǀ TCP/IP ǀ USB (nur für manuelle Bedieneinheiten) | EtherCAT Slave ǀ RS-232 ǀ TCP/IP ǀ USB (nur für manuelle Bedieneinheiten) | |
| An/Aus-Schalter | Hardware-Schalter An/Aus | Hardware-Schalter An/Aus | Hardware-Schalter An/Aus | Hardware-Schalter An/Aus | |
| Display und Anzeigen | Status-LED ǀ Error-LED ǀ Power-LED ǀ Macro-LED | Status-LED ǀ Error-LED ǀ Power-LED ǀ Macro-LED | Status-LED ǀ Error-LED ǀ Power-LED ǀ Macro-LED | Status-LED ǀ Error-LED ǀ Power-LED ǀ Macro-LED | |
| Manuelle Bedienhilfe(n) | Manuelle Bedieneinheit mit USB-Anschluss | Manuelle Bedieneinheit mit USB-Anschluss | Manuelle Bedieneinheit mit USB-Anschluss | Manuelle Bedieneinheit mit USB-Anschluss | |
| Befehlssatz | GCS 2.0 | GCS 2.0 | GCS 2.0 | GCS 2.0 | |
| Bedienersoftware | PIMikroMove | PIMikroMove | PIMikroMove | PIMikroMove | |
| Software-APIs | C, C++, C# ǀ MATLAB ǀ NI LabView ǀ Python | C, C++, C# ǀ MATLAB ǀ NI LabView ǀ Python | C, C++, C# ǀ MATLAB ǀ NI LabView ǀ Python | C, C++, C# ǀ MATLAB ǀ NI LabView ǀ Python | |
| Analoge Eingänge | 4 | 6 | 4 | 6 | |
| Analoges Eingangssignal | 4 x -10 bis 10 V, 12 Bit | 2 x -5 bis 5 V, 16 Bit, 5 kHz Bandbreite ǀ 4 x -10 bis 10 V, 12 Bit | 4 x -10 bis 10 V, 12 Bit | 2 x -5 bis 5 V, 16 Bit, 5 kHz Bandbreite ǀ 4 x -10 bis 10 V, 12 Bit | |
| Digitale Eingänge | 4 | 4 | 4 | 4 | |
| Digitales Eingangssignal | TTL | TTL | TTL | TTL | |
| Digitale Ausgänge | 4 | 4 | 4 | 4 | |
| Digitales Ausgangssignal | TTL | TTL | TTL | TTL | |
| Industrial Ethernet Protokoll | EtherCAT | EtherCAT | EtherCAT | EtherCAT | |
| EtherCAT Geräteklasse | EtherCAT Slave | EtherCAT Slave | EtherCAT Slave | EtherCAT Slave | |
| EtherCAT Kommunikationsprofil | CAN application protocol over EtherCAT (CoE) | CAN application protocol over EtherCAT (CoE) | CAN application protocol over EtherCAT (CoE) | CAN application protocol over EtherCAT (CoE) | |
| Antriebsprofil implementiert für EtherCAT | CiA402 Drive Profile (IEC 61800-7-201) | CiA402 Drive Profile (IEC 61800-7-201) | CiA402 Drive Profile (IEC 61800-7-201) | CiA402 Drive Profile (IEC 61800-7-201) | |
| Unterstützte Betriebsmodi gemäß CiA402 | Referenzfahrt (homing mode) ǀ Positioniermodus mit zyklischer Positionsvorgabe durch die SPS (cyclic synchronous position mode) ǀ Sicherer Grundzustand zum Aktivieren von Koordinatensystemen (No mode changes / no mode selected) | Referenzfahrt (homing mode) ǀ Positioniermodus mit zyklischer Positionsvorgabe durch die SPS (cyclic synchronous position mode) ǀ Sicherer Grundzustand zum Aktivieren von Koordinatensystemen (No mode changes / no mode selected) | Referenzfahrt (homing mode) ǀ Positioniermodus mit zyklischer Positionsvorgabe durch die SPS (cyclic synchronous position mode) ǀ Sicherer Grundzustand zum Aktivieren von Koordinatensystemen (No mode changes / no mode selected) | Referenzfahrt (homing mode) ǀ Positioniermodus mit zyklischer Positionsvorgabe durch die SPS (cyclic synchronous position mode) ǀ Sicherer Grundzustand zum Aktivieren von Koordinatensystemen (No mode changes / no mode selected) | |
| EtherCAT Zykluszeit | ≥1 ms | ≥1 ms | ≥1 ms | ≥1 ms | |
| EtherCAT Synchronisierungsmodi | Distributed Clocks (DC) ǀ Synchron mit SYNC0 Event | Distributed Clocks (DC) ǀ Synchron mit SYNC0 Event | Distributed Clocks (DC) ǀ Synchron mit SYNC0 Event | Distributed Clocks (DC) ǀ Synchron mit SYNC0 Event | |
| Elektrische Eigenschaften | C-887.53 | C-887.531 | C-887.532 | C-887.533 | |
| Ausgangsspannung | 24 V | 24 V | 24 V | 24 V | |
| Spitzenausgangsstrom | 6000 mA | 6000 mA | 6000 mA | 6000 mA | |
| Anschlüsse und Umgebung | C-887.53 | C-887.531 | C-887.532 | C-887.533 | |
| Hexapodanschluss Stromversorgung | M12 4-polig (w) | M12 4-polig (w) | M12 4-polig (w) | M12 4-polig (w) | |
| Hexapodanschluss Datenübertragung | HD D-Sub 78 (w) | HD D-Sub 78 (w) | HD D-Sub 78 (w) | HD D-Sub 78 (w) | |
| Anschluss Zusatzachsen | D-Sub 15 (w) | D-Sub 15 (w) | D-Sub 15 (w) | D-Sub 15 (w) | |
| Anschluss analoger Eingang | HD D-Sub 26 (w) | BNC ǀ HD D-Sub 26 (w) | HD D-Sub 26 (w) | BNC ǀ HD D-Sub 26 (w) | |
| Anschluss digitaler Eingang | HD D-Sub 26 (w) | HD D-Sub 26 (w) | HD D-Sub 26 (w) | HD D-Sub 26 (w) | |
| Anschluss digitaler Ausgang | HD D-Sub 26 (w) | HD D-Sub 26 (w) | HD D-Sub 26 (w) | HD D-Sub 26 (w) | |
| Anschluss Motion-Stop-Button | — | — | M12 8-polig (w) | M12 8-polig (w) | |
| Anschluss TCP/IP | RJ45 Buchse, 8P8C | RJ45 Buchse, 8P8C | RJ45 Buchse, 8P8C | RJ45 Buchse, 8P8C | |
| Anschluss RS-232 | D-Sub 9 (m) | D-Sub 9 (m) | D-Sub 9 (m) | D-Sub 9 (m) | |
| Anschluss EtherCAT | RJ45 Buchse, 8P8C | RJ45 Buchse, 8P8C | RJ45 Buchse, 8P8C | RJ45 Buchse, 8P8C | |
| Anschluss Versorgungsspannung | M12 4-polig (m) | M12 4-polig (m) | M12 4-polig (m) | M12 4-polig (m) | |
| Betriebsspannung | 24 V | 24 V | 24 V | 24 V | |
| Netzteil | Im Lieferumfang ǀ Netzteil 24 V DC | Im Lieferumfang ǀ Netzteil 24 V DC | Im Lieferumfang ǀ Netzteil 24 V DC | Im Lieferumfang ǀ Netzteil 24 V DC | |
| Maximale Stromaufnahme | 8 A | 8 A | 8 A | 8 A | |
| Betriebstemperaturbereich | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | |
| Gesamtmasse | 2800 g | 2800 g | 2800 g | 2800 g |
PI Simulation Models for CoppeliaSim / V-REP
C-887.MC2 Manual Control Unit
C-887 Hexapod-Controller, Modelle C-887.52, C-887.521, C-887.522, C-887.523, C-887.53, C-887.531, C-887.532, C-887.533
EtherCAT Interface der Hexapod-Controller C-887
Bewegungen des Positionierers. Position und Orientierung im Raum, Drehpunkt.
Beschreibung der Koordinatensysteme für Hexapod-Mikroroboter und Parallelkinematische Positionierer
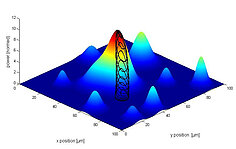
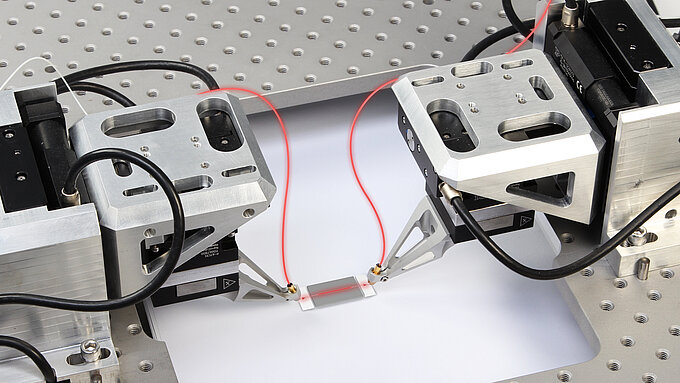
Schnelles optisches Ausrichten von Siliziumphotonik-Komponenten mit F-712 Alignment-Systemen und Hexapoden von PI. PILightning-Option für First-Light-Suche
Beschreibung der Software PIHexapodEmulator
Einen Controller C-887 von PI in TwinCAT 3.1 implementieren
Aktualisierung von PI-Software mit dem PIUpdateFinder
GCS Array Data Format
PIMikroMove
PI GCS DLL
PI MATLAB Driver GCS 2.0
PIStages3Editor zur Bearbeitung der Verstellerdatenbank PIStages3
Informationen zur PIStages3 Verstellerdatenbank. Was ist beim Umstieg von PIStages2 auf PIStages3 zu beachten.
PIPython - Programmierung von PI Controllern mit Python
PI GCS2 Driver Library for NI LabVIEW
PI Software on ARM-Based Platforms
PIVirtualMove. Simulationsprogramm für parallelkinematische Mehrachssyteme
Aktualisierung von Controller-Firmware mit dem PIFirmwareManager
Einfache Einbindung der sechsachsigen Roboter in die Prozessumgebung
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
6-Achs-Controller für Hexapoden, TCP/IP, RS-232, Tischgerät, inkl. Ansteuerung von zwei Zusatzachsen, EtherCAT-Schnittstelle
6-Achs-Controller für Hexapoden, TCP/IP, RS-232, Tischgerät, inkl. Ansteuerung von zwei Zusatzachsen, EtherCAT-Schnittstelle, Analogeingänge
6-Achs-Controller für Hexapoden, TCP/IP, RS-232, Tischgerät, inkl. Ansteuerung von zwei Zusatzachsen, EtherCAT-Schnittstelle, Motion Stop
6-Achs-Controller für Hexapoden, TCP/IP, RS-232, Tischgerät, inkl. Ansteuerung von zwei Zusatzachsen, EtherCAT-Schnittstelle, Motion Stop, Analogeingänge
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.
In vielen Anwendungsfeldern gibt es die Anforderung, Komponenten bis auf Nanometer genau auszurichten. Optische Komponenten wie z.B. die Linsen oder Linsenbaugruppen in kleinen Kameras, ebenso wie der CCD Chip selbst, müssen mit zunehmender Genauigkeit positioniert werden.

EtherCAT Netzwerke integrieren PI-Controller als Slave. ACS Motion Controller können als EtherCAT Master oder untergeordnet in einer bestehenden Busarchitektur eingebunden werden.

Digitale Controller haben gegenüber analogen Verstärkerelektroniken Vorteile, die vor allem bei hochpräzisen Positionieraufgaben zum Tragen kommen.

Schnelle USB- oder TCP/IP-Interfaces zählen neben RS-232 zu den Standardschnittstellen, die moderne Digitalcontroller von PI unterstützen.