
Bei automatisierten Produktionsprozessen gelten strenge Vorschriften für den Schutz von Personen. Wenn schnelle Bewegungen ausgeführt werden und große Kräfte wirken, ist es notwendig, spezielle Sicherheitsmaßnahmen durchzuführen. Gängige und relativ einfach zu integrierende Lösungen bestehen aus Absperrungen, z. B. Gittern, die Personen von den Maschinen räumlich trennen. Wo sich mechanische Trennsysteme nicht anbringen lassen oder sie den Arbeitsprozess in der Anlage beeinträchtigen, können berührungslos wirkende Schutzeinrichtungen verwendet werden, wie z.B. ein Lichtgitter oder ein Lichtvorhang. Ein Lichtvorhang bildet ein engmaschiges Schutzfeld und sichert so den Zugang zum Gefahrenbereich.
Wann ist eine Schutzeinrichtung beim Einsatz von Hexapoden sinnvoll und notwendig?

Hexapoden sind >> sechsachsige parallelkinematische Positioniersysteme mit beschränktem Arbeitsraum, die sicherheitstechnisch häufig unkritisch integriert werden können. Etwas anders ist die Situation bei dynamischen Hexapoden, welche aufgrund der hohen Geschwindigkeit und Beschleunigung eine Gefahr für Personen, die sich im unmittelbaren Umfeld des Hexapods aufhalten, darstellen können. Das liegt vor allem an der begrenzten Reaktionszeit des Menschen, um gefährdete Körperteile aus einem Gefahrenbereich zu entfernen. Hohe Impulskräfte aufgrund der Massenträgheit bei einer Kollision sowie Quetschungen von Gliedmaßen sind möglich. Ein Sicherheitssystem kann den Menschen schützen und dieses Verletzungsrisiko minimieren.
Je nach Ausführung besitzen die PI Hexapod-Controller einen Motion-Stop Eingang. Dieser dient zum Anschluss von externer Hardware (z.B. Push-Buttons oder Schalter) und deaktiviert bzw. aktiviert die Spannungsversorgung der Antriebe des Hexapods. Allerdings bietet die Buchse Motion-Stop keine direkte Sicherheitsfunktion im Sinne geltender Normen (z.B. IEC 60204-1, IEC 61508 oder IEC 62061).
Um dies zu erreichen, kann beispielsweise ein >> Lichtvorhang von PILZ (zugelassen nach EN/IEC 61508 und EN/IEC 61496-1/-2) in die Steuerung des Hexapods eingebunden werden.
Lichtvorhänge bestehen in den meisten Fällen aus einer Sende- und Empfangseinheit. In der Sendeeinheit befinden sich in gleichmäßigem Abstand aneinandergereihte Lichtquellen (z.B. LEDs), welche auf die Empfängereinheit strahlen. Diese ist mit Detektoren in selber Anordnung (z.B. Photodioden) ausgestattet, wobei jeder für die Detektion seiner gegenüberliegenden Lichtquelle verantwortlich ist. Je nach Auflösung, d.h. Abstand der Lichtquellen voneinander, ist Finger-, Hand- oder Körperschutz gegeben.
Wird mindestens einer der Strahlen unterbrochen, so gibt der Lichtvorhang diese Information über zwei sogenannte OSSD (Output Switching Signal Device) Ausgänge aus. Diese befinden sich im Normalzustand in diesem Fall auf 24 V und fallen zum Zwecke der Selbstüberwachung kurzzeitig und asynchron voneinander auf 0 V. Um diese Ausgangssignale auswerten zu können, wird ein passendes und zertifiziertes Schaltgerät benötigt, welches im Fehlerfall die Maschinenbewegung abschaltet, bzw. anhält.
Auslegung des Lichtvorhangs – Bestimmung der Sicherheitsstufe, des Mindestabstands und des Aufbaus
Mit Hilfe der Risikobeurteilung nach EN ISO 13849-1 kann die Gefährdungssituation bestimmt werden und damit die Anforderungen an das Sicherheitssystem. Mit der EN ISO 13855 wird der Mindestabstand der Schutzeinrichtung zum Gefahrenbereich berechnet. Dies ist wichtig, um die maximale Reichweite zu bestimmen, die der Lichtvorhang schalten muss. Hierbei ist zu beachten, dass verschiedene Annäherungsgeschwindigkeiten für die verschiedenen Schutzarten (Personen-, Hand-, Fingerschutz) gelten.
Bei der Sicherheitsvorrichtung für den Hexapod wurde ein engmaschiger Lichtvorhang mit einer Auflösung von 30 mm gewählt und für den Hexapod angenommen, dass bei einer Bewegungsgeschwindigkeit von 100 mm/s der Anhalteweg 3 mm beträgt.
Anhand der folgenden Formel, die für Lichtvorhänge mit einer Auflösung von < 40 mm gilt lässt sich eine Sicherheitsabstand von 316 mm berechnen:

S = Sicherheitsabstand, v = Annäherungsgeschwindigkeit, t1 und t2 = Auslösezeit der Elektronik und Bremszeit der Maschine, d = Auflösung des Lichtvorhangs
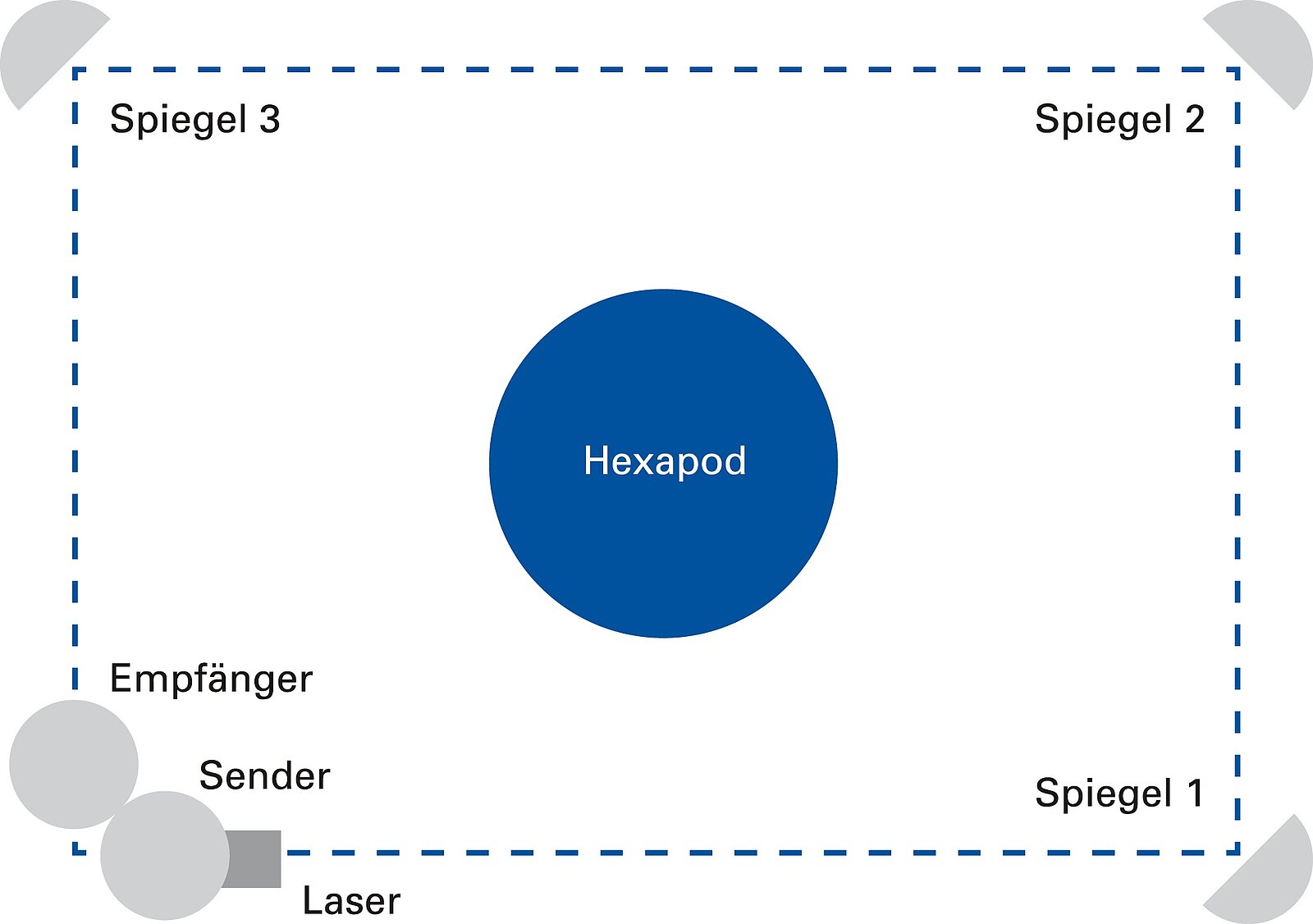
Anhand der zu Grunde liegenden Parameter und Annahmen wurde der mechanische Aufbau wie im Bild unten zu sehen umgesetzt. Die Implementierung der Sicherheitsfunktion erfolgte beispielhaft in der Programmiersprache Python. Es ist jedoch jederzeit möglich, eine andere Softwarelösung zu verwenden, sowie eine SPS zu nutzen und den Hexapod zum Beispiel über EtherCAT® anzubinden.

Weiterführende Informationen zur Einbindung in die Elektronik, zu den verwendeten Komponenten von PILZ und PI und zur Implementierung der Sicherheitsfunktion erhalten Sie im Whitepaper:

Whitepaper
Industrielle Schutzeinrichtung bei Hexapoden
Wie ein Sicherheits-Lichtvorhang mit einem Hexapod-System verbunden wird


