EtherCAT® ist ein offenes, Ethernet-basiertes Echtzeit-Feldbussystem, das ursprünglich von Beckhoff Automation entwickelt wurde. Heute setzen Systemingenieure EtherCAT immer häufiger für Maschinensteuerungslösungen ein. Ein Grund für die wachsende Beliebtheit ist unter anderem die Flexibilität des robusten Hochgeschwindigkeits- und Echtzeitnetzwerks.
Lesen Sie hier, wie Lösungen von ACS Motion Control über EtherCAT vernetzt werden können.
EtherCAT Technologie Hintergrund
Ein Echtzeitnetzwerk zeichnet sich durch Folgendes aus:
- Hochpräzises Timing
- Hohe Zuverlässigkeit
- Deterministisch – garantierte Ansprechzeiten
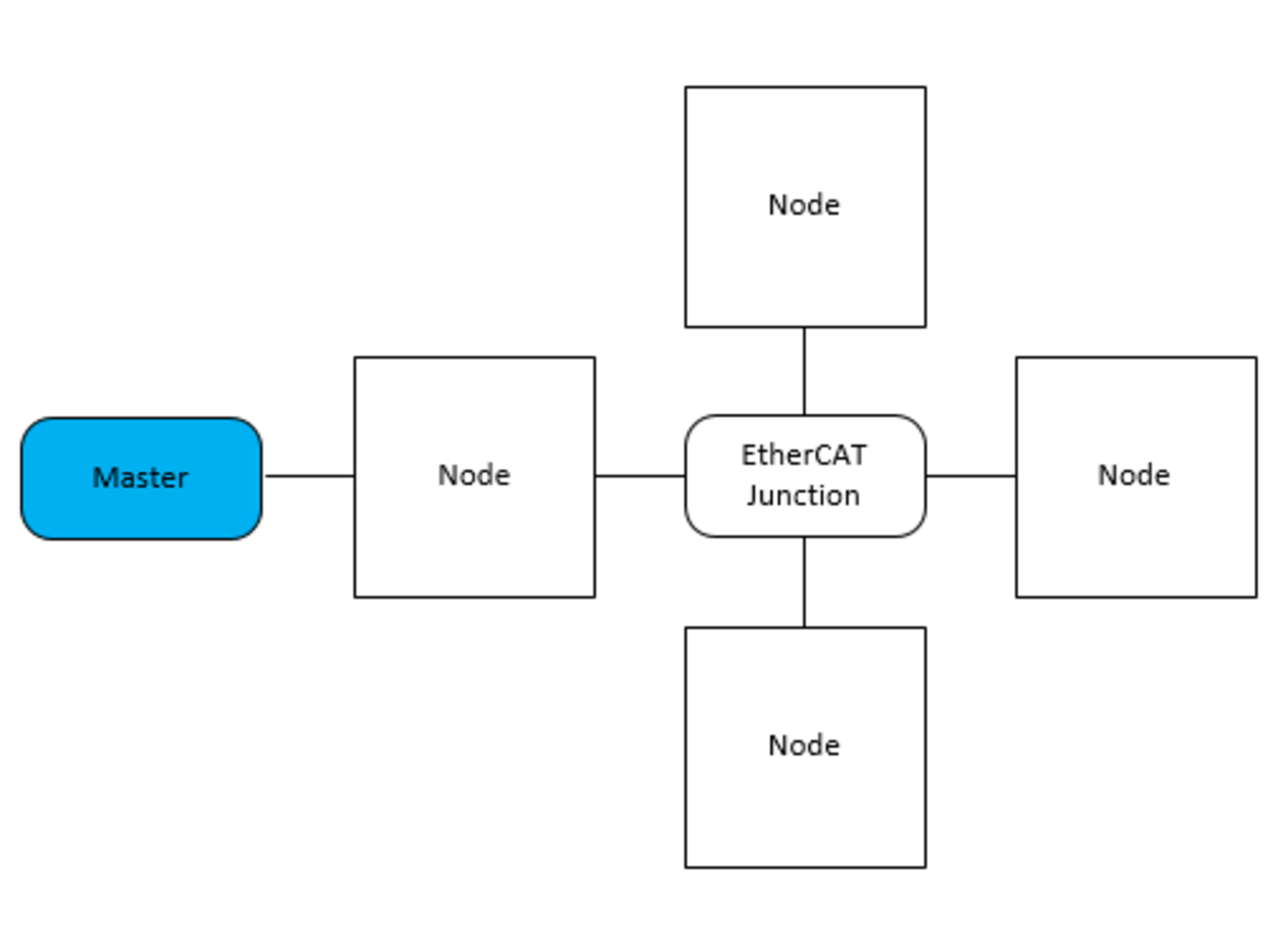
Ein EtherCAT Netzwerk besteht aus einem EtherCAT Master und einem oder mehreren EtherCAT Knoten. Ein Netzwerk kann maximal 65535 Knoten haben.
Die ausgezeichnete Performance, die flexible Topologie, die einfache Integration und die Robustheit sind Gründe dafür, dass immer mehr Unternehmen Produkte auf Basis von EtherCAT entwickeln. Seit der Einführung von EtherCAT im April 2003 haben mehr als 4500 Firmen auf der ganzen Welt EtherCAT-basierte Produkte und dazugehörige Software entwickelt.
Welche Netzwerk-Topologie unterstützt ACS?
ACS unterstützt Linien-, Ring- und Sterntopologien. Eine Besonderheit ist die NetworkBoost™ Ringtopologie, die die Systemverfügbarkeit und -produktivität erhöht, indem sie Netzwerkfehler lokalisiert und eliminiert.
>> ACS NetworkBoost
Die Sterntopologie, die auf EtherCAT Verbindungen basiert, ist von Vorteil wenn die "Flexible Configuration" Funktion eingesetzt wird, die es ermöglicht Gruppen von Knoten während des Betriebs der Maschine zu trennen.
>> ACS Application Note Downloads
Synchronisierung: Welche Zykluszeiten sind erreichbar?
Ein kritischer Faktor bei Hochleistungsanwendungen ist die exakte Synchronisierung. ACS Knoten werden mit dem Einsatz der EtherCAT Distributed-Clocks-Technologie (DC) synchronisiert. Der Controller unterstützt kurze Zykluszeiten: 1 ms, 0,5 ms, 0,25 ms und 0,2 ms (entsprechend 1, 2, 4 und 5 kHz).
Einfache Integration von Drittanbieter-Produkten
DS402 Antriebe von Drittanbietern oder andere Typen von EtherCAT Knoten werden häufig zusammen mit ACS Controllern verwendet. Die Integration mit weiteren ACS Produkten im gleichen EtherCAT Netzwerk ist einfach und erfordert keine besonderen Anpassungen.
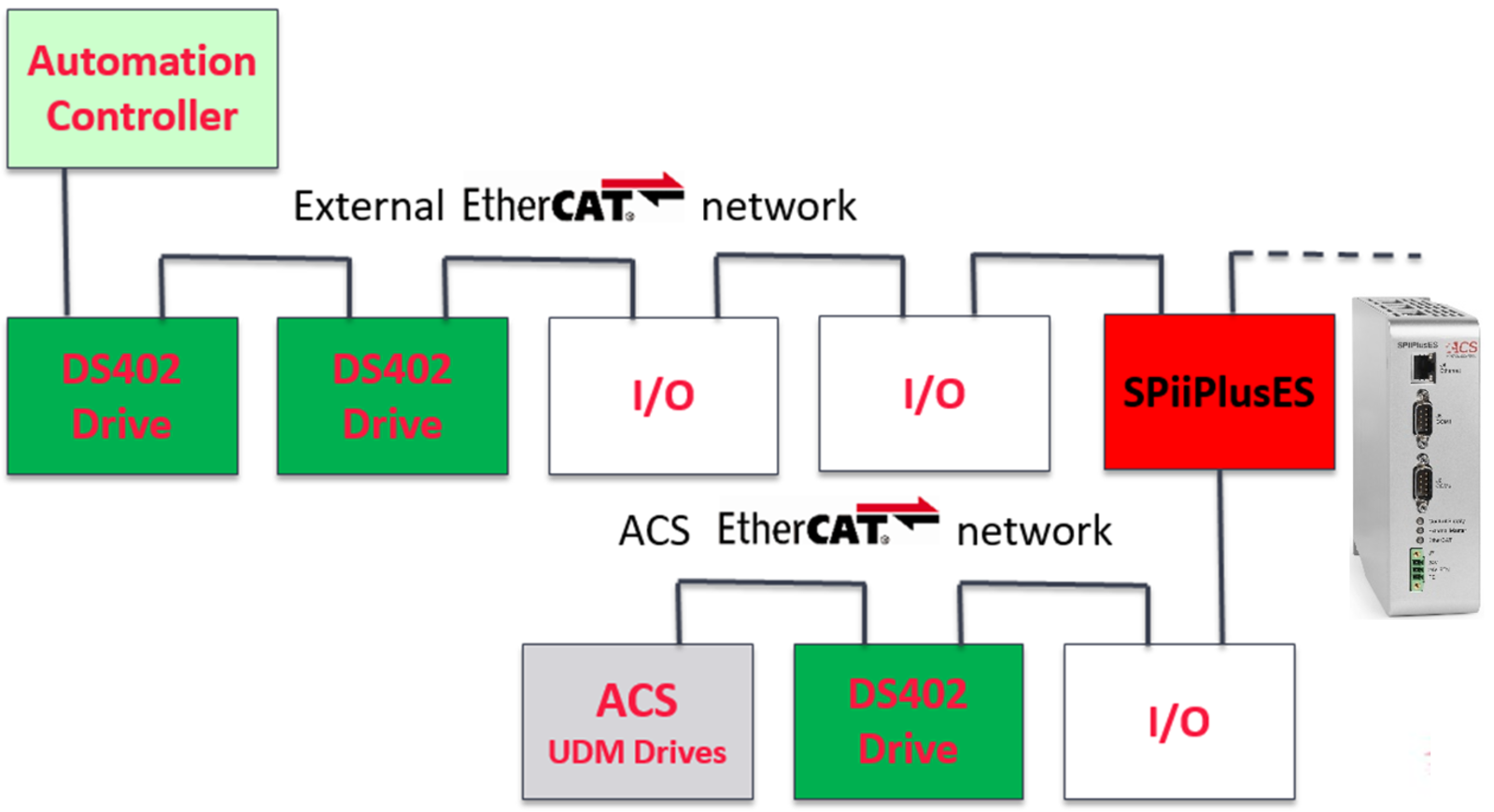
Kann ACS als untergeordnetes System eingebunden und von einem anderen EtherCAT Master angesteuert werden?
Der >> SPiiPlusES, ein erst kürzlich freigegebenes Produkt, kann auch von einem nicht-ACS EtherCAT Master angesteuert werden und so einfach in ein bestehendes EtherCAT Netzwerk integriert werden. Der SPiiPlusES ist zunächst ein Motion Controller, der ein ACS "internes" Netzwerk steuert. Als EtherCAT Antriebsregler gemäß Standard DS402 unterstützt er bis zu 8 Achsen. Zusätzlich kann er als EtherCAT Bridge eingesetzt werden, die den synchronisierten Datenaustausch zwischen dem nicht-ACS und dem ACS Netzwerk gewährleistet.
Dadurch kann man auch in einem nicht-ACS Netzwerk von den einzigartigen ACS Regelalgorithmen profitieren, z.B. von ServoBoost, das die Einschwingzeiten optimiert. Oder von NanoPWM, das ein subnanometergenaues Tracking ermöglicht
ACS Motion Control und EtherCAT
ACS Motion Control ist ein globales Unternehmen, das EtherCAT-basierte Hochleistungssysteme zur Maschinensteuerung einsetzt für Bewegungs- und Positionieranwendungen mit einer verteilten Architektur.
ACS entwickelt EtherCAT Controller und eine Vielzahl von EtherCAT Knoten wie z.B. Antriebsregler, digitale und analoge Ein- und Ausgänge, DS402 Antriebsprofile und vieles mehr. Außerdem entwickelt ACS auch alle zugehörigen Software-Tools wie z.B. einen EtherCAT Konfigurator und Tools für die Netzwerk-Diagnostik.
Gemeinsam mit PI liefert ACS Bewegungs- und Positionierlösungen für die industrielle Automatisierung z. B. in der Montage, in der Halbleiterfertigung, in der Lasermaterialbearbeitung, in Inspektionssystemen oder in der additiven Fertigung.
PI Präzisionslösungen über EtherCAT vernetzen

PI bietet die Möglichkeit Hexapoden, parallelkinematische Positioniersysteme für 6 Achsen, über EtherCAT in Automatisierungsnetzwerke einzubinden. Der Integrationsaufwand auf Kundenseite ist dabei gering. Zielpositionen werden einfach in kartesischen Koordinaten kommandiert, und der stabile virtuelle Pivotpunkt kann frei im Raum definiert werden. Der PI EtherCAT Hexapodcontroller übernimmt alle benötigten Koordinatentransformationen, egal ob im Tool oder Work Bezugssystem gearbeitet wird.
