Mehrachsen-Piezotische
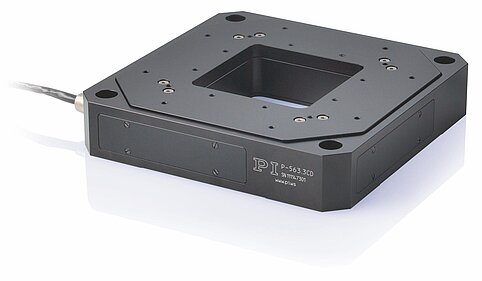
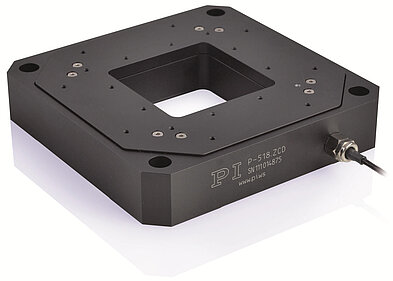
Mehrachsen-Piezotische von PI erlauben das Positionieren und Scannen mit Subnanometer-Präzision in bis zu 6 Achsen inklusive aller Kipp- und Drehrichtungen. Vom besonders kompakten Piezocube bis zum Design mit großer Apertur und niedrigem Profil sind viele Varianten verfügbar.
XYZ-Scanner sind die Universaltische für Positioniertechnik. Ihre Applikationen liegen in der Probenpositionierung, optischen Messtechnik, Faserpositionierung und Photonik oder in der Rasterkraftmikroskopie.
Alle Piezo-Nanopositioniersysteme werden ab Werk geprüft und voreingestellt mit Messprotokoll ausgeliefert.