Mit Schrittweiten von 40 nm in X, Y und 20 nm in Z erfüllt der H-840.G2IHP höchste Anforderungen für Alignment- und Positionieranwendungen in Produktion und Messtechnik. Das Design und die Auslegung ist wie bei der gesamten H-840-Hexapodserie robust und bietet lange Stellwege für flexible Aufgaben. Ein Messprotokoll der Schrittweite liegt jeder einzelnen Auslieferung bei.
Weitere Modelle, z. B. mit Absolutencoder oder für hohe Dynamik, sind im Datenblatt für den H-840 aufgeführt.
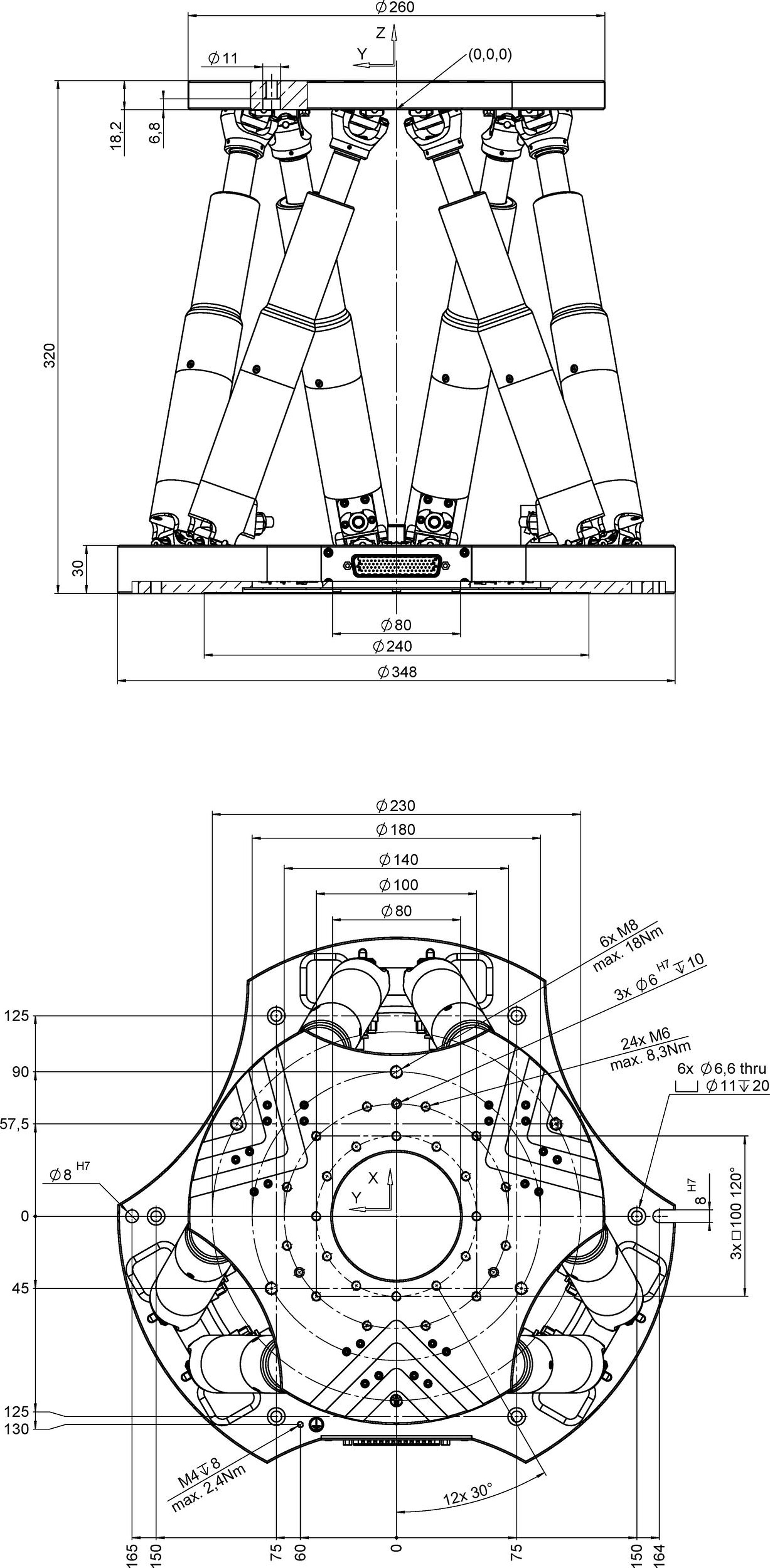
Das parallelkinematische Design für 6 Freiheitsgrade macht den Aufbau wesentlich kompakter und steifer als vergleichbare Seriellkinematiksysteme. Die Vorteile gegenüber seriellen, also gestapelten Systemen, sind vor allem die bessere Bahntreue und Wiederholgenauigkeit. Zudem ist die bewegte Masse geringer und ermöglicht dadurch eine verbesserte Dynamik, die für alle Bewegungsachsen gleich ist. Da keine Kabel bewegt werden, ist auch das Kabelmanagement unproblematisch.
Verwendung von BLDC-Motoren
Bürstenlose DC-Motoren eignen sich besonders gut für hohe Drehzahlen. Sie lassen sich sehr genau regeln und sorgen für hohe Präzision. Durch den Verzicht auf Schleifkontakte sind sie laufruhig und verschleißarm und erreichen somit eine hohe Lebensdauer.
PIVirtualMove
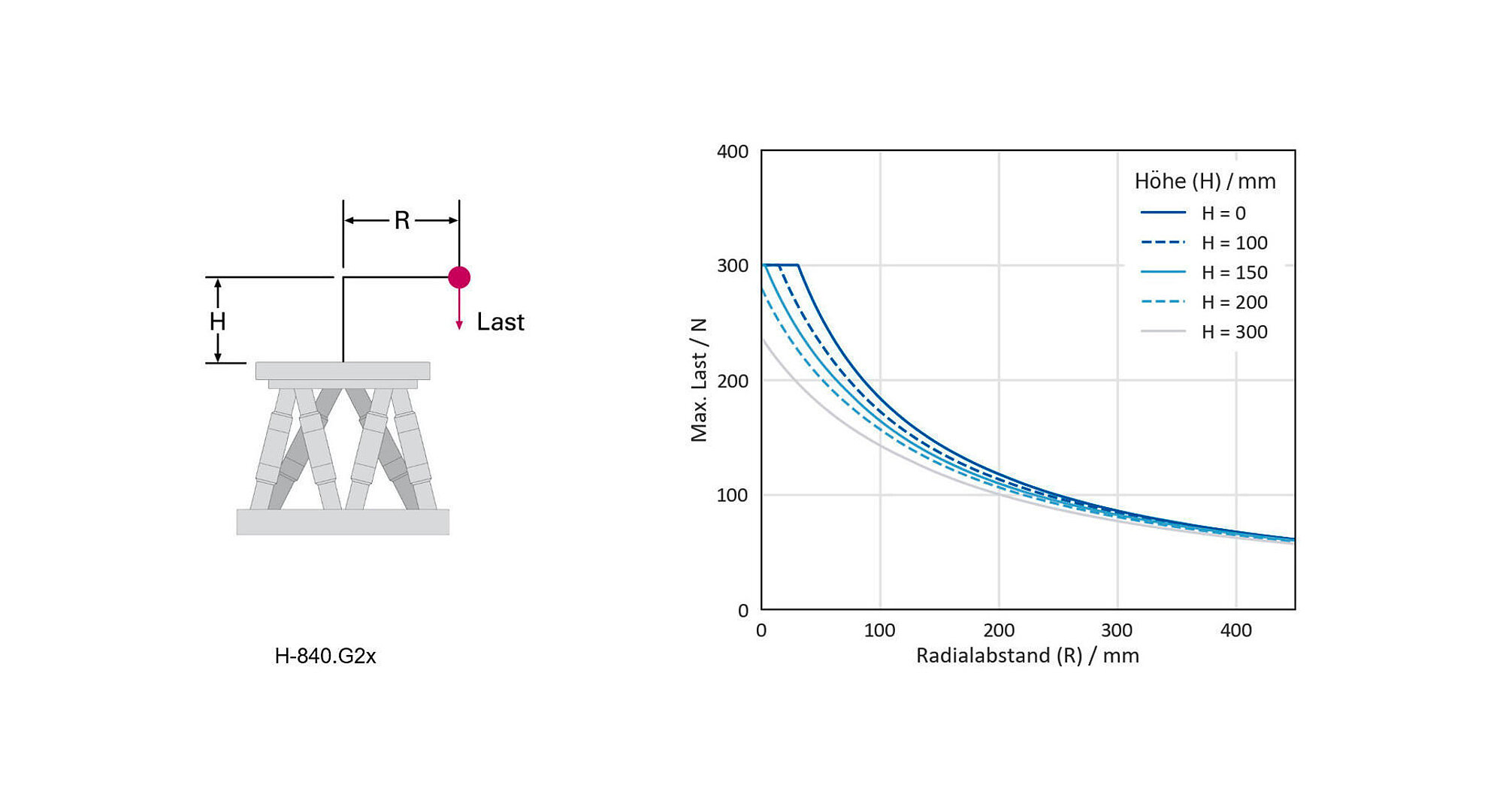
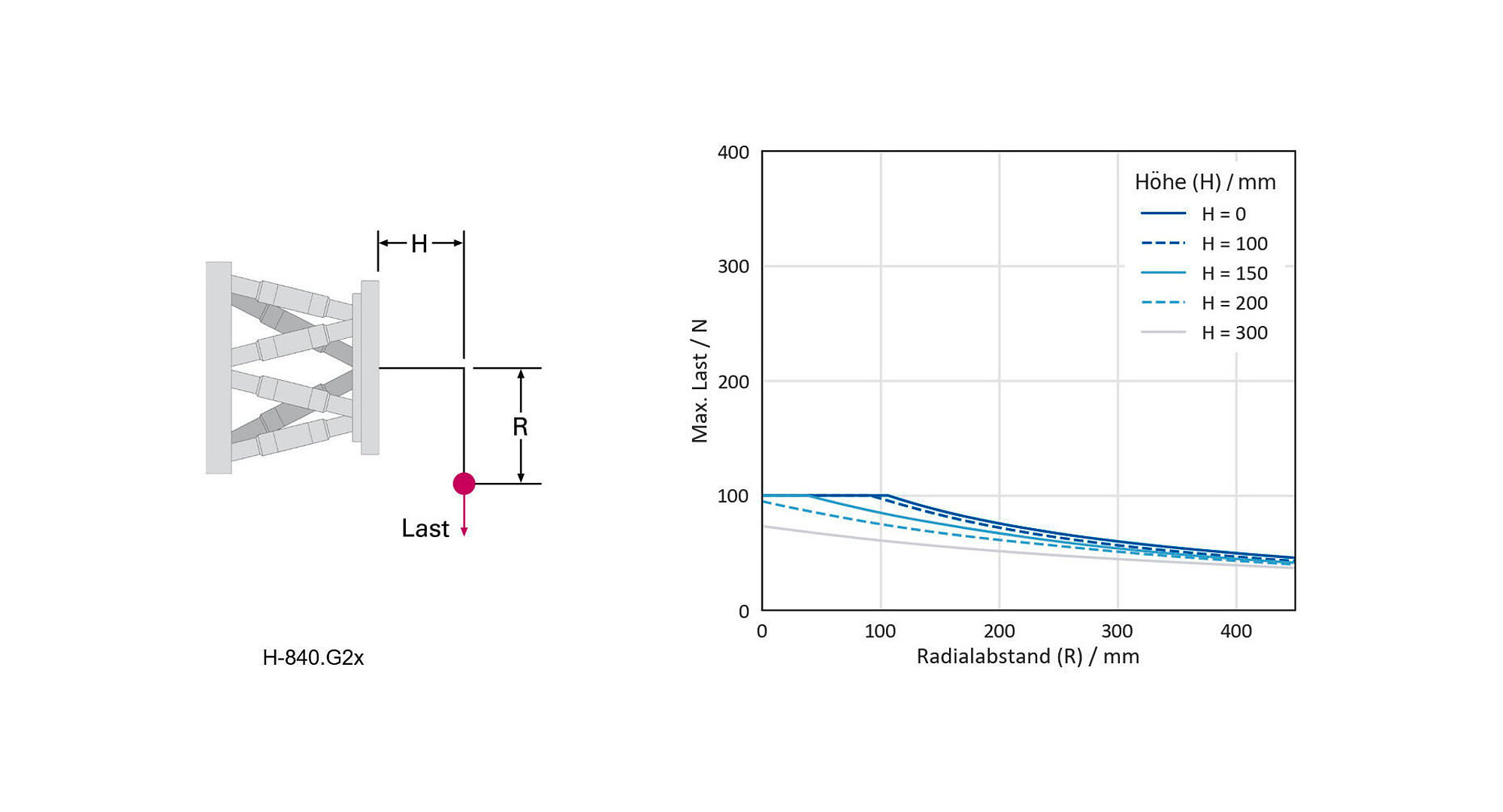
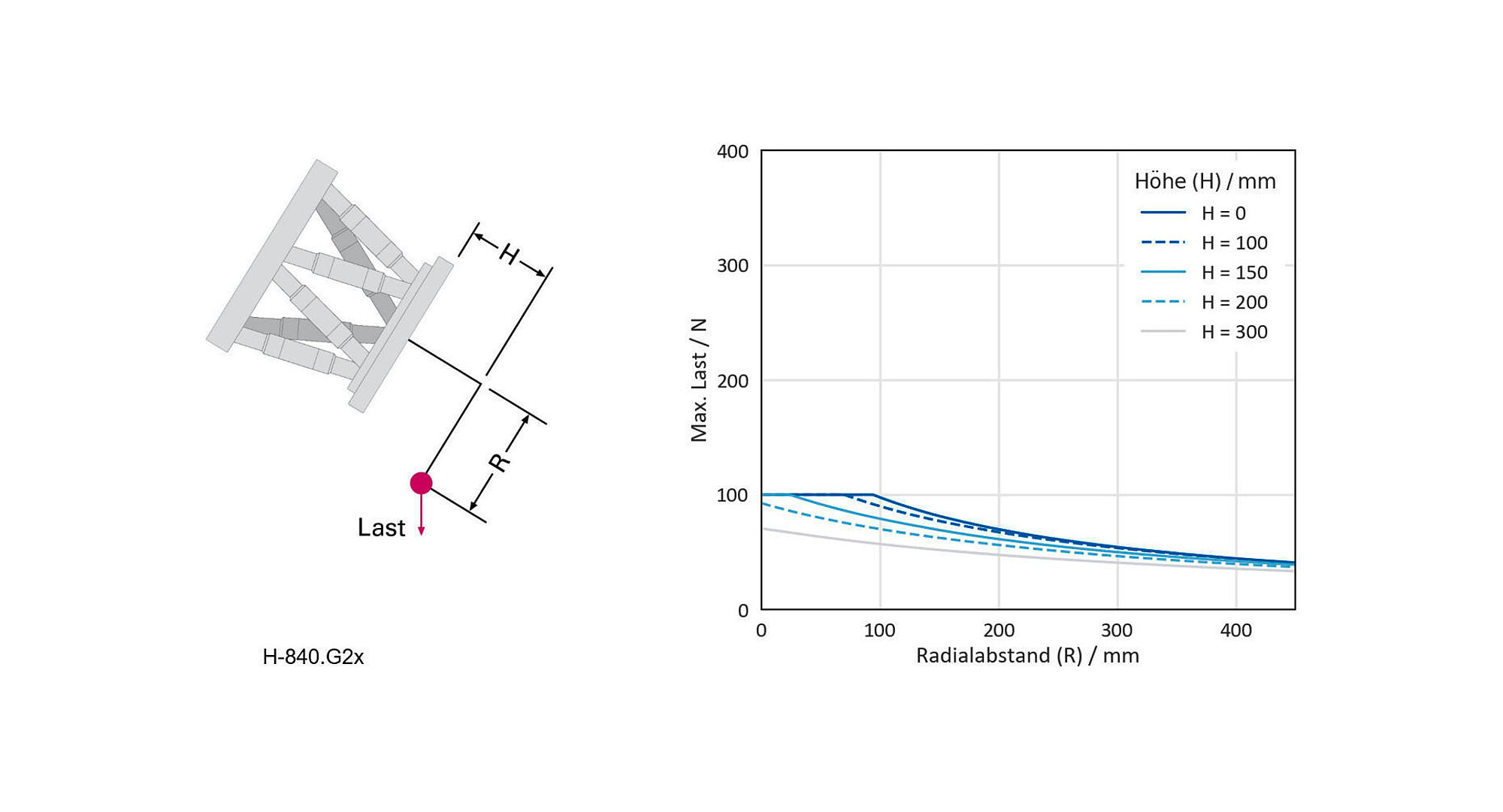
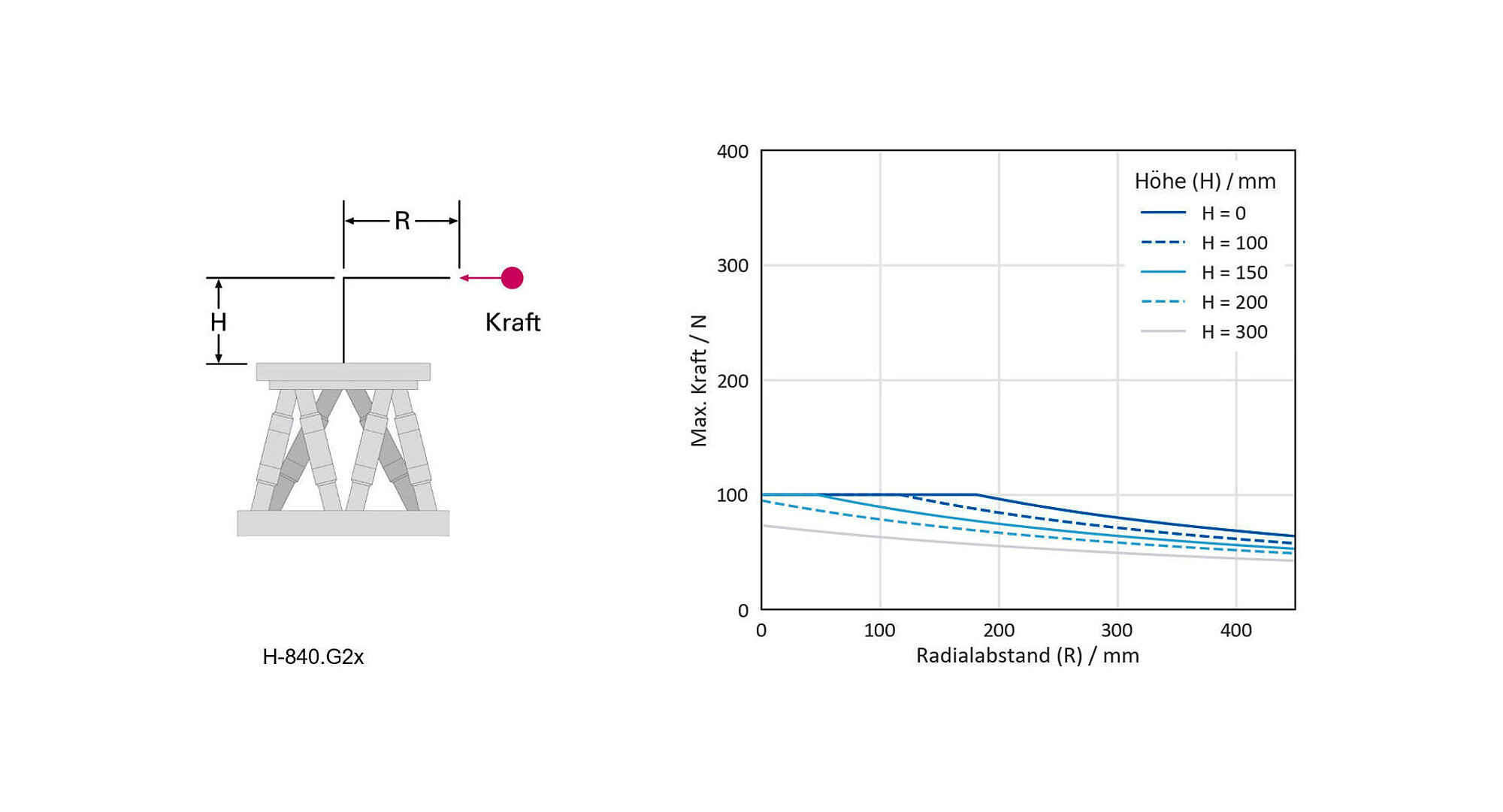
Die Simulationssoftware simuliert die Grenzen des Arbeitsraums und der Nutzlast eines Hexapoden. Damit kann bereits vor einer Kaufentscheidung überprüft werden, ob ein bestimmtes Hexapod-Modell die auftretenden Lasten, Kräfte und Momente in einer Anwendung aufnehmen kann. Das Simulationstool berücksichtigt dazu die Lage und die Bewegung des Hexapoden, sowie die Position des Pivotpunkts und verschiedene Bezugskoordinatensysteme.
Einsatzgebiete
Industrie und Forschung. Für Werkzeugkontrolle, Life-Science, Mikrofertigung, Mikromanipulation, industrielle Ausrichtsysteme. Für Montage, Alignment und Inspektion von optischen Komponenten.