Betriebsspannung
Betriebsspannung
PI Ceramic bietet verschiedene Typen von Piezoaktoren mit unterschiedlichen Schichthöhen an. Daraus ergeben sich nominale Betriebsspannungen von 60 V für PICMA® Bender bis zu 1000 V für Aktoren der PICA Serien.
Elektrisches Verhalten
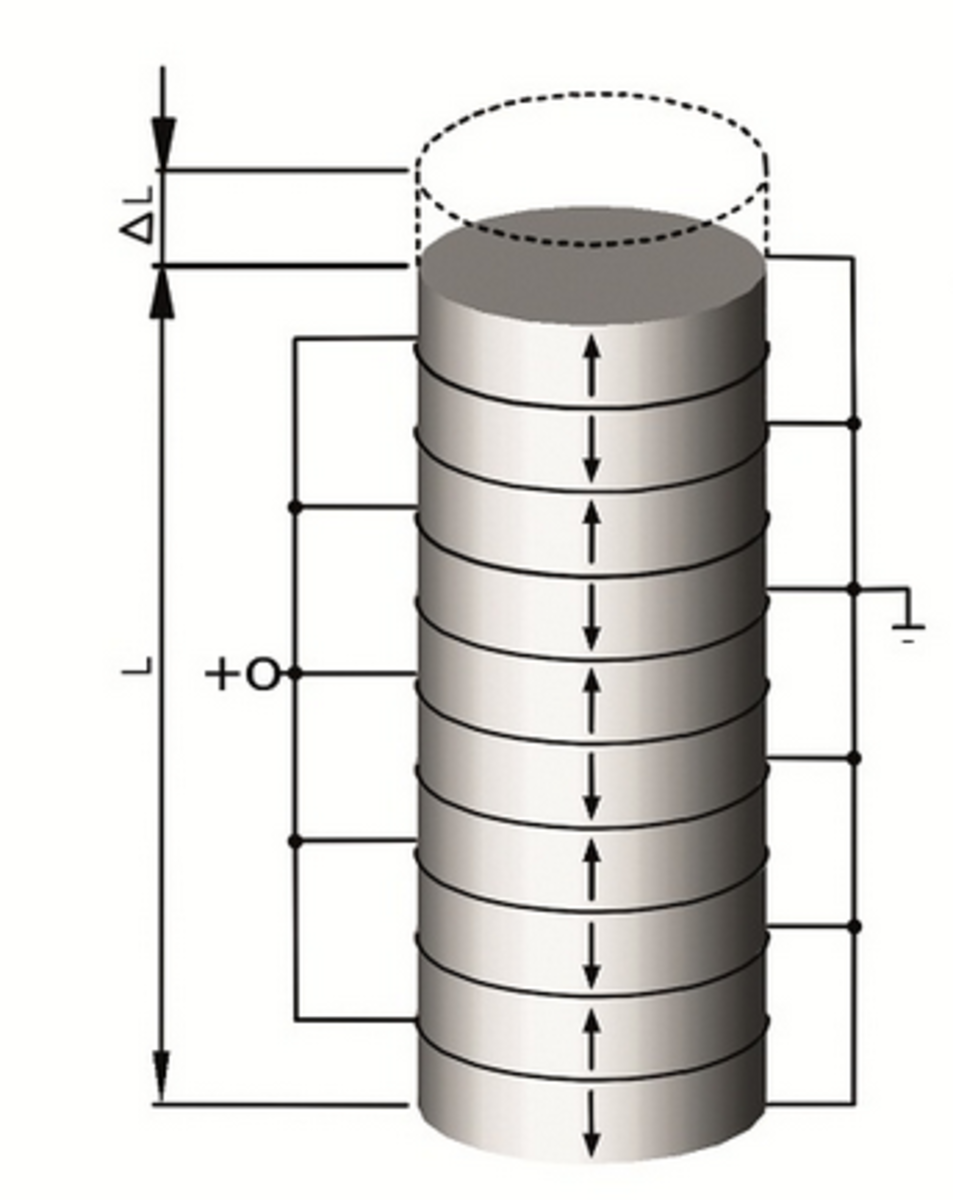
Bei Betriebsfrequenzen weit unterhalb der Resonanzfrequenz verhält sich ein Piezoaktor wie ein Kondensator. Die Auslenkung ist in erster Näherung proportional zur gespeicherten elektrischen Ladung. Die Kapazität des Aktors hängt dabei von der Fläche und Dicke der Keramik sowie den Materialeigenschaften ab. Bei Aktoren, die aus mehreren elektrisch parallel geschalteten Keramikschichten aufgebaut sind, wird die Kapazität auch durch die Anzahl der Schichten bestimmt. In den Aktoren gibt es Leckstromverluste, die aufgrund des hohen Innenwiderstandes im μA-Bereich oder darunter liegen.
Elektrische Kapazitätswerte
Die Kapazitätswerte in den technischen Daten sind Kleinsignalwerte, d. h. sie sind gemessen bei Ansteuerung mit 1 V, 1000 Hz, 20 °C, lastfrei. Die Kapazität der Piezokeramik ändert sich mit der Spannungsamplitude, der Temperatur und der Last auf bis zu 200 % des unbelasteten Kleinsignalwertes bei Raumtemperatur.
Für Berechnungen unter Großsignalbedingungen genügt häufig ein Sicherheitsfaktor von 70 %, der zur Kleinsignalkapazität addiert wird (Abb. 2).

![Kapazität [F] bei fester Aktorlänge](/fileadmin/user_upload/pi_ceramic/IMG/PIC_Gleichung_22.png "Kapazität [F] bei fester Aktorlänge")
| C | Kapazität [F] |
| n | Anzahl der Keramikschichten im Aktor |
| ε33T | Permittivität = ε33/ε0 [As/Vm] |
| A | Aktorquerschnittsfläche [m²] |
| hL | Schichthöhe im Aktor [m] |
| l | Aktorlänge [m] |
| P | Leistung, die in Wärme umgewandelt wird [W] |
| V | Spannung am Piezoaktor [V] |
| Vpp | Ansteuerspannung (Spitze-Spitze) [V] |
![Kapazität [F]](/fileadmin/user_upload/pi_ceramic/IMG/PIC_Gleichung_21.png "Kapazität [F]")
Demnach hat ein PICMA® Stack Aktor mit einer Schichthöhe von 60 μm eine ca. 70 mal höhere Kapazität als ein volumengleicher PICA Stack Aktor mit einer Schichthöhe von 500 μm. Die elektrische Leistungsaufnahme P beider Typen ist aufgrund der Beziehung P ~ C V2 etwa gleich, da sich die Ansteuerspannung proportional zur Schichthöhe verändert.
In einem elektrisch geladenen Piezoaktor ist etwa die Energie E = 0,5 CV2 gespeichert. Jede Ladungsänderung und damit Auslenkungsänderung ist mit einem Ladungstransport verbunden, der den folgenden Strom I benötigt:
![Strom [A]](/fileadmin/user_upload/pi_ceramic/IMG/PIC_Gleichung_23.png "Strom [A]")
Für langsame Positionsänderungen wird nur ein geringer Strom benötigt. Zum Halten der Position ist selbst bei hohen Lasten nur die Kompensation der sehr geringen Leckströme nötig. Die Leistungsaufnahme ist entsprechend gering. Wenn ein geladener Piezoaktor plötzlich von der elektrischen Quelle getrennt wird, kommt es zu keiner rapiden Positionsänderung. Die Entladung und damit die Rückkehr zur Nullposition geschieht kontinuierlich und sehr langsam.
Betrieb mit Positionsreglung
Beim Betrieb im geschlossenen Regelkreis wird die maximale Arbeitsfrequenz auch durch Phasen- und Amplitudengang des Systems begrenzt. Es gilt: je höher die Resonanzfrequenz der Mechanik, desto höher kann die Regelbandbreite eingestellt werden. Auch die Sensorbandbreite und Leistungsfähigkeit des Reglers (digital/analog, Filter- und Reglertyp, Bandbreite) begrenzen die Betriebsbandbreite des Positioniersystems.
Leistungsaufnahme des Piezoaktors
In dynamischen Anwendungen nimmt die Leistungsaufnahme des Aktors linear mit Frequenz und Aktorkapazität zu. Ein kompakter Piezoaktors mit ca. 100 N Belastbarkeit benötigt bei 1.000 Hz und 10 μm Hub weniger als 10 Watt Blindleistung, während ein Hochlastaktor (>10 kN Belastbarkeit) bei gleichen Bedingungen einige 100 Watt erfordert.
Wärmeerzeugung in einem Piezoelement bei dynamischem Betrieb
Da sich Piezoaktoren wie kapazitive Lasten verhalten, steigen ihre Lade- und Entladeströme mit der Arbeitsfrequenz an. Die dabei im Aktor erzeugte thermische Leistung P kann wie folgt abgeschätzt werden:
![Leistung, die in Wärme umgewandelt wird [W]](/fileadmin/_processed_/b/d/csm_PIC_Gleichung_24_ad1b4255d5.png "Leistung, die in Wärme umgewandelt wird [W]")
Bei Aktor-Piezokeramik liegt der Verlustfaktor unter Kleinsignalbedingungen in der Größenordnung von 0,01–0,02. Dadurch werden bis zu 2 % der elektrischen Leistung, die in den Aktor fließt, in Wärme umgewandelt. Bei Großsignalbedingungen kann dieser auf deutlich höhere Werte ansteigen. (Abb. 3) Die maximale Arbeitsfrequenz hängt deshalb auch von der zulässigen Betriebstemperatur ab. Bei hohen Frequenzen und Spannungsamplituden können Kühlungsmaßnahmen notwendig werden. PI Ceramic bietet für diese Anwendungen auch Piezoaktoren mit integrierten Temperatursensoren zur Überwachung der Keramiktemperatur an.

| P | Leistung, die in Wärme umgewandelt wird [W] |
| tan δ | Dielektrischer Verlustfaktor (Verhältnis von Wirk- zu Blindleistung) |
| f | Arbeitsfrequenz [Hz] |
| C | Aktorkapazität [F] |
| Vpp | Ansteuerspannung (Spitze-Spitze) [V] |
| Epp | Elektrische Feldstärke (Spitze-Spitze) [kV/mm] |
Dauerstrom, Spitzenstrom und Kleinsignalbandbreite für jeden Piezoverstärker von PI können den Spezifikationen in den >> Datenblättern entnommen werden.
Dielektrische Verlustfaktoren
Abb. 3 zeigt die dielektrischen Verlustfaktoren tan δ für verschiedene Materialien und Ansteuerformen bei Raumtemperatur und quasistatischer Ansteuerung. Die Umrechnung zwischen Spannung und Feldstärke für konkrete Aktoren erfolgt mit den Schichthöhen. Der tatsächliche Verlustfaktor im Bauelement hängt von weiteren Faktoren ab, wie der mechanischen Vorspannung, der Temperatur, der Ansteuerfrequenz und dem passiven Materialanteil.
Kontinuierlicher dynamischer Betrieb
Um einen Piezoaktor mit gewünschter Dynamik betreiben zu können, muss der Piezoverstärker bestimmten Mindestanforderungen genügen. Zu deren Abschätzung betrachtet man die Beziehung zwischen Verstärkerausgangsstrom, Betriebsspannung des Piezoaktors und Arbeitsfrequenz.
Für die Ansteuerung eines Piezoaktors mit einer symmetrischen Dreiecksfunktion sind sowohl der Dauerstrom als auch der Spitzenstrom des Verstärkers maßgeblich. Die maximale Betriebsfrequenz eines Verstärkers kann folgendermaßen abgeschätzt werden:

Dabei gilt zusätzlich die Nebenbedingung, dass der Verstärker wenigstens Imax = 2 Ia für die Ladezeit, d.h. für die halbe Periodendauer, liefern kann. Sofern das nicht möglich ist, sollte die maximale Arbeitsfrequenz entsprechend niedriger gewählt werden. Für Verstärker, die keinen höheren Spitzenstrom liefern können oder nicht ausreichend lange, sollte stattdessen mit dieser Gleichung gerechnet werden:

Bestimmend für den kontinuierlichen Betrieb mit einer Sinusfunktion ist der Effektiv oder Dauerstrom Ia des Verstärkers, der in den entsprechenden Datenblättern genannt ist. Die Dauerstromwerte werden unter den definierten Umgebungsbedingungen zeitlich unbegrenzt garantiert.
![Dauerstrom des Verstärkers (Source / Sink) [A]](/fileadmin/_processed_/a/2/csm_PIC_Gleichung_25_2b9c006555.png "Dauerstrom des Verstärkers (Source / Sink) [A]")
Für sinusförmige Einzelpulse, die nur für kurze Dauer ausgeführt werden, kann die folgende Gleichung angewendet werden:
![Spitzenstrom des Verstärker (Source / Sink) [A]](/fileadmin/_processed_/0/8/csm_PIC_Gleichung_26_49d72139af.png "Spitzenstrom des Verstärker (Source / Sink) [A]")
Signalform und Bandbreite
Neben der Leistungsabschätzung des Piezoverstärkers ist bei allen von der Sinusform abweichenden Signalformen die Betrachtung der Kleinsignalbandbreite wichtig.
Je mehr Oberwellen des Ansteuersignals nicht mehr übertragen werden, umso mehr nähert sich die resultierende Form wieder der Grundwelle, also einer Sinusform an. Die Bandbreite sollte daher mindestens zehnmal so hoch sein wie die Grundfrequenz, um eine Signalverfälschung aufgrund der nicht mehr übertragenen Harmonischen zu vermeiden.
Die nutzbare Grenze der Frequenzanteile, denen das mechanische Piezosystem noch folgen kann, ist in der Praxis die mechanische Resonanzfrequenz. Das elektrische Ansteuersignal muss daher aber auch keine deutlich höheren Frequenzanteile enthalten.
Die schnellstmögliche Auslenkung eines Piezoaktors kann in 1/3 der Periode seiner Resonanzfrequenz erfolgen. Anstiegszeiten im Mikrosekundenbereich und Beschleunigungen von mehr als 10.000 g sind möglich, erfordern aber vom Piezoverstärker besonders hohe Spitzenströme. Dadurch werden schnelle Schaltanwendungen wie z. B. Einspritzventile, Hydraulikventile, Schaltrelais, optische Schalter und adaptive Optik möglich.
Für Ladungsvorgänge mit konstantem Strom kann mit folgender Gleichung die Mindestanstiegszeit im Pulsbetrieb ermittelt werden:
![Zeit bis V<sub>pp</sub> am Piezoaktor anliegt [s]](/fileadmin/_processed_/c/1/csm_PIC_Gleichung_29_fb35ba4fd4.png "Zeit bis V<sub>pp</sub> am Piezoaktor anliegt [s]")
Auch hier ist die Kleinsignalbandbreite des Verstärkers bestimmend. Die Anstiegszeit des Verstärkers muss deutlich kürzer als die Piezo-Ansprechzeit sein, um die Auslenkung nicht durch den Verstärker zu begrenzen. Für die Praxis gilt die Faustregel, die Bandbreite des Verstärkers zwei- bis dreimal höher als die Resonanzfrequenz zu wählen.
Vor- und Nachteile einer Positionsregelung bei Schaltanwendungen
Ein Positionsregler arbeitet immer im linearen Aussteuerbereich der Spannungen und Ströme. Da der Spitzenstrom zeitlich begrenzt und daher nicht linear ist, kann er für eine stabile Wahl der Regelparameter nicht genutzt werden. Dadurch begrenzt die Positionsregelung die Bandbreite und lässt einen Pulsbetrieb, wie beschrieben, nicht zu.
In Schaltanwendungen kann daher häufig eine erforderliche Positionsstabilität und Linearität nicht durch Positionsregelung erreicht werden. Eine Linearisierung kann z. B. durch die Ladungssteuerung der Verstärker oder durch numerische Korrekturverfahren erreicht werden.
