







Whitepaper
My first ACS.NET Application
Schritt-für-Schritt-Erklärung zur Erstellung einer einfachen Anwendung in Microsoft C#

High Performance Motion Controller Systeme
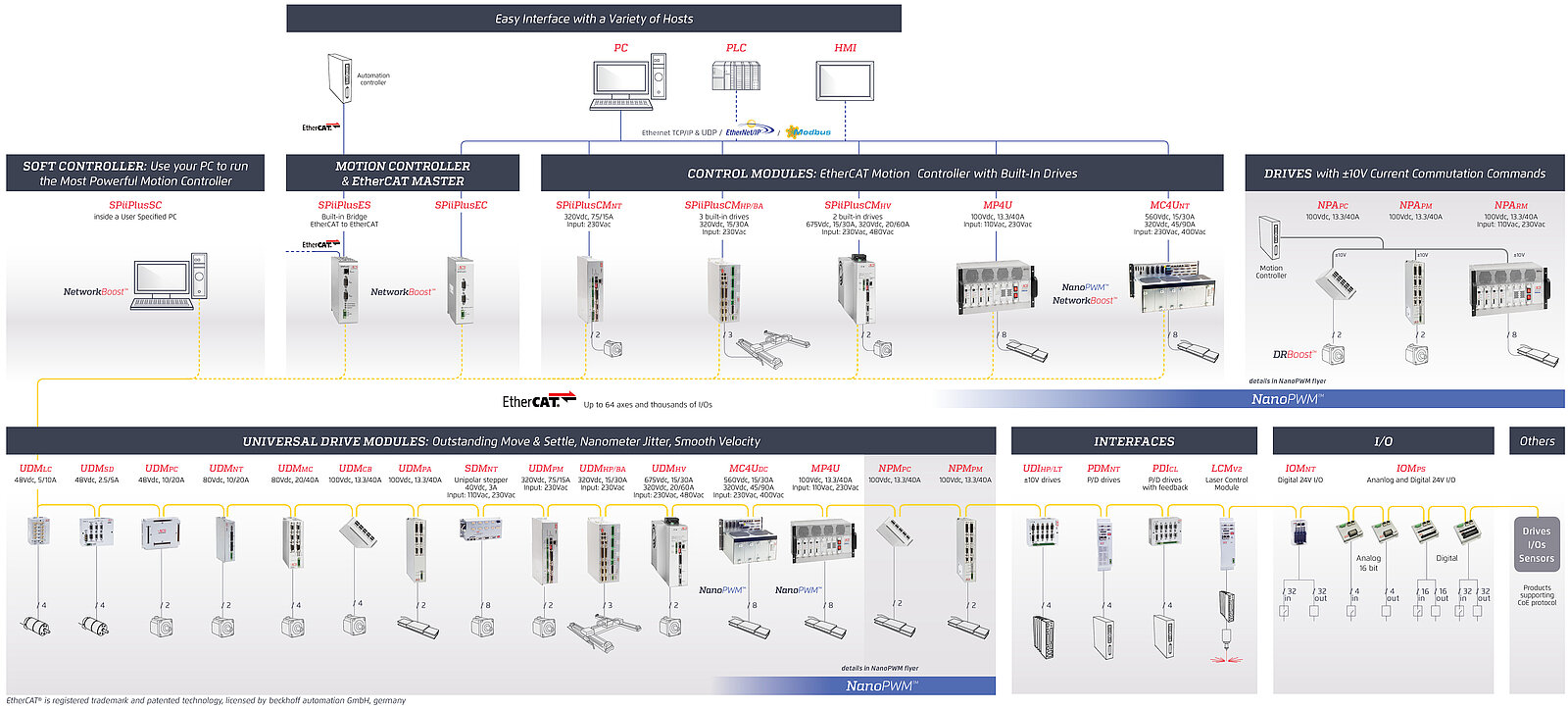
ACS Motion Control bietet ein vollständig modular aufgebautes Controllersystem, das die Komponenten in drei Ebenen organisiert:
Die erste Ebene ist die Benutzeroberfläche. Dabei handelt es sich um die Host-Software, die die Kommunikation mit dem Bewegungssystem ermöglicht.
Auf der zweiten Ebene befinden sich die Motion Controller. Der Motion Controller übernimmt die Kommunikation mit der Host-Software . Hier findet unter anderem die Profilgenerierung statt, ebenso wie die Trajektorienplanung, Makrosteuerung, und die Diagnose. Die daraus resultierenden Positionsbefehle werden über ein Echtzeit-EtherCAT-Netzwerk an die Antriebsmodule auf der dritten Ebene gesendet. Bei sogenannten Controller Modulen sind Motion Controller, Antriebsmodule und Netzteile in einem Gehäuse integriert.
Die universellen Antriebsmodule der dritten Ebene übernehmen die eigentliche Positionierung der Achsen. Sie versorgen die Motoren mit Strom, steuern ihre Bewegung und werten die Sensorsignale für die Positionsregelung aus.
Eigenschaften der ACS Industriecontroller-Plattform
Die ACS Motion Controller Plattform arbeitet als EtherCAT Master, der alle Knoten (Servocontroller-, I/O- und Sensormodule) im EtherCAT Netzwerk koordiniert. Die Controller sind modular aufgebaut, skalierbar, und kommunizieren mit der übergeordneten Maschinen- oder Anlagensteuerung über Ethernet.
Die Controller-Architektur mit den hohen Regelfrequenzen von 20kHz für Strom-, Geschwindigkeits- und Lageregelung ist die Voraussetzung, um die hohe Dynamik mit minimalen Folgefehlern zu erreichen.
Die Motion Controller optimieren Step- und Settle-Zeiten durch einzigartige Regelalgorithmen, wie die Servo-Boost-Funktion, und das Profile Shaping, die Systemschwingungen zuverlässig unterdrücken können.
Spezielle patentierte Controllerfeatures wie z.B. NanoPWM erlauben einen dynamischen Bereich in der Stromregelung von über 100000:1. Dadurch werden Trackingfehler beim Waferscannen auf wenige Nanometer begrenzt, und während der Datenaufnahme wird die Position im Subnanometerbereich gehalten.
Dazu kommt eine umfangreiche Trigger-Funktionalität z.B. für Laseranwendungen oder Inspektionsfunktionen. Eine integrierte 3D-Kompensation von Positionierfehlern und die Kompensation des Gierens bei Gantrylösungen ermöglichen die Realisierung von Anwendungen mit höchsten Genauigkeitsanforderungen.
Der eigens entwickelte ServoBoost Algorithmus detektiert Störungen in Echtzeit, identifiziert die Ursache und minimiert den Effekt. Er erleichtert die Inbetriebnahme und eine Optimierung der Performance bei wechselnden Lasten, oder Wechselwirkungen mehrerer Achsen auf demselben Rahmen. Das Resultat ist eine sehr stabile und robuste Regelung mit hoher Positioniergenauigkeit und extrem kurzen Einschwingzeiten.